Pomegranate Systems Power Module
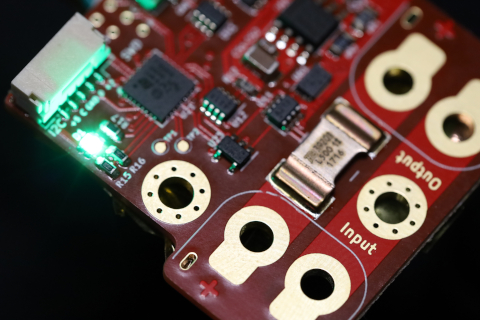
Digital Power Module with high resolution current integration, 5V/2A supply with power monitoring, single UAVCAN v0 CANbus interface, and an RGB status LED.
Detailed setup, configuration, and troubleshooting information can be found on the manufacturer's device home page.
Specifications
- Input Voltage: 6-26V (2-6S)
- Max Continuous Current:
- Benchtop: 40A
- Forced Cooling: 100A
- Max 5V Output Current: 2A
- Voltage Resolution: 0.04 ΔV
- Current Resolution:
- Primary / Battery Bus: 0.02 ΔA
- 5V bus: 0.001 ΔA
- CANbus Termination: Electronic (on by default)
- MCU: STM32 F302K8U
- Firmware: Open Source
- Electrical Interface:
- Power: Solder pads or XT60PW (right angle, board-mounted connectors)
- CANbus Dual JST GH-4 (standard UAVCAN micro-connector)
- I2C / Serial: JST GH-5
- 5V Output: Solder pads or CANbus / I2C connectors
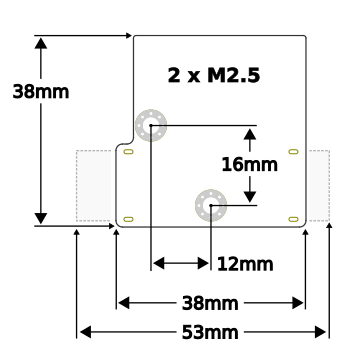
- Device Mass:
- Without Connectors: 9g
- With XT60PW Connectors: 16g
Configuration
- Enable UAVCAN by setting the UAVCAN_ENABLE parameter to
2(Sensors Automatic Config) or3. - Set the following module parameters using the Mavlink console:
- Battery capacity in mAh:
battery_capacity_mAh - Battery voltage when full:
battery_full_V, - Battery voltage when empty:
battery_empty_V - Turn on current integration:
enable_current_track - (optional) Turn Off CANbus termination resistor :
enable_can_term
- Battery capacity in mAh:
Example: A Power Module with UAVCAN node id 125 connected to a 3S LiPo with capacity of 5000mAh can be configured with the following commands:
uavcan param set 125 battery_capacity_mAh 5000
uavcan param set 125 battery_full_V 12.5
uavcan param set 125 battery_empty_V 11.2
uavcan param set 125 enable_current_track 1
uavcan param save 125
See device configuration page for a full list of parameters.