多旋翼的加加速度限制型轨迹
加加速度有限的轨迹类型能响应用户摇杆输入或任务的变化(例如:航拍,测绘,货运)并为机体提供平滑的运动。 它能产生对称的平滑 S-曲线使加加速度和加速度的极限始终得到保证。
此轨迹类型始终在任务模式下启用。 若要在定点模式启用,请设置参数:MPC_POS_MODE=3。
在位置模式下,默认使用加加速度限制型轨迹。 但它可能不适合于那些需要较快响应的机体/使用案例——例如穿越机。
轨迹生成器
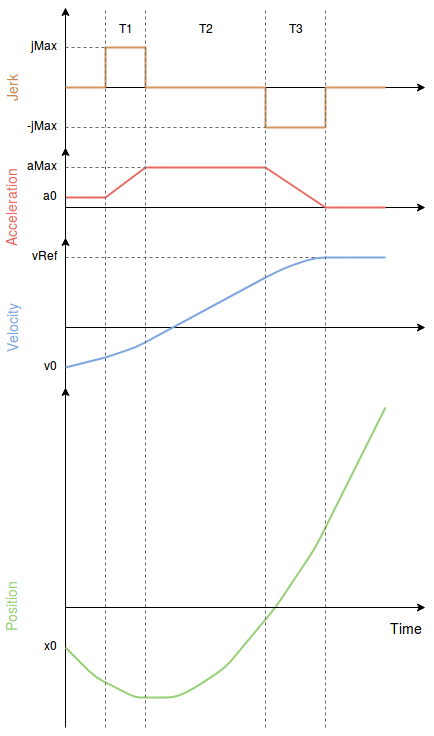
下图显示了具有如下约束的典型加加速度限制剖面:
jMax:最大抖动jMax:初始加速度aMax:最大加速度a3:最终加速度(始终为 0)v0:初始速度vRef:期望速度
其中,约束 jMax、aMax 由用户通过参数页配置,在手动定点控制和自动模式下可能有所不同。
所得的速度剖面通常称为“S-曲线”。
手动模式
在手动定点模式下,通过摇杆控制速度,在这种情况下,通过参数 MPC_VEL_MANUAL 定义完整的摇杆挠度。
约束
XY平面:
jMax:MPC_JERK_MAXaMax: MPC_ACC_HOR_MAX
Z轴:
jMax:MPC_JERK_MAXaMax(上升动作):MPC_ACC_UP_MAXaMax(下降动作):MPC_ACC_DOWN_MAX
自动模式
在自动模式下,所需的速度是 MPC_XY_CRUISE,但该值会根据到下一个航点的距离、航线中可能的最大速度以及所需的最大加速度和加加速度自动调整。
约束
XY平面:
jMax:MPC_JERK_AUTOaMax:MPC_ACC_HOR
Z轴:
jMax:MPC_JERK_AUTOaMax(上升动作):MPC_ACC_UP_MAXaMax(下降动作):MPC_ACC_DOWN_MAX
渐进某个航点时的距离-速度增益: