# Holybro Durandal
PX4에서는 이 제품을 제조하지 않습니다. 하드웨어 지원과 호환 문제는 [제조사](https://shop.holybro.com/)에 문의하십시오.
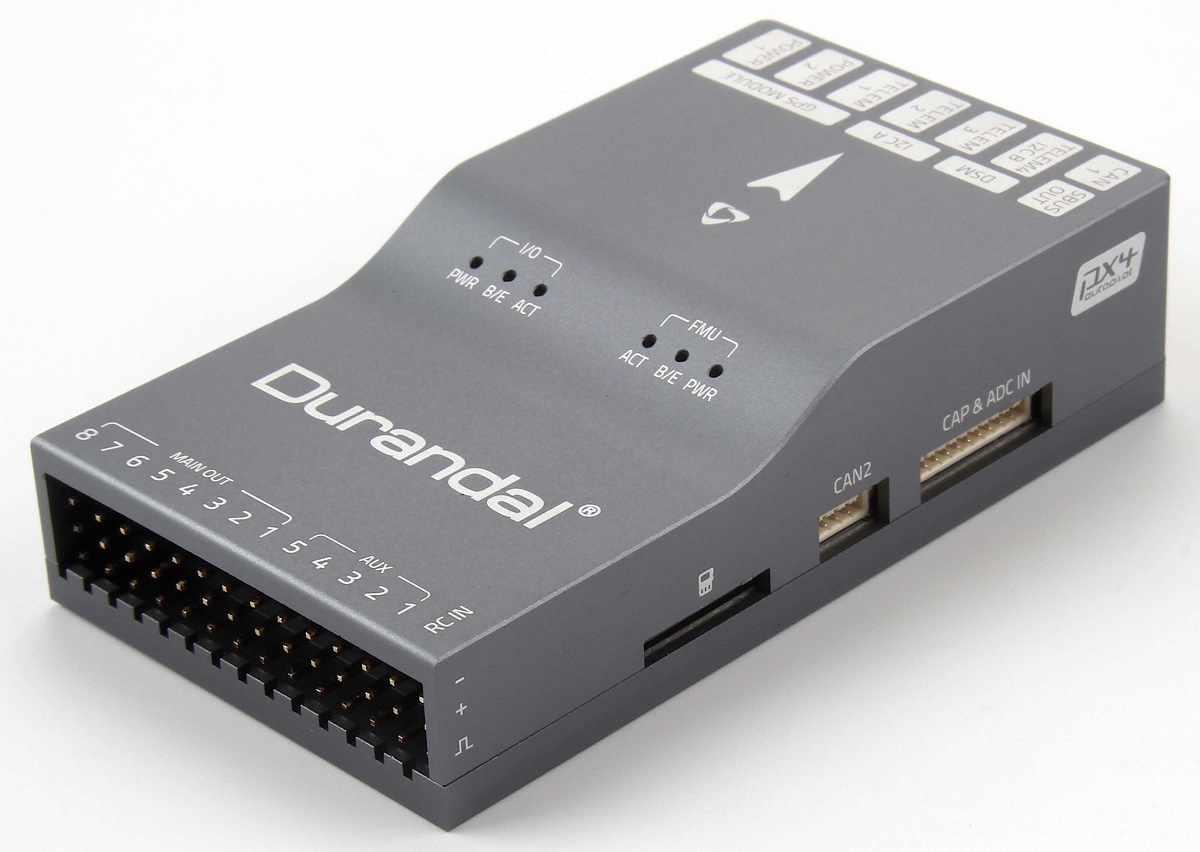
Durandal®는 성공적인 Holybro 비행 컨트롤러 제품군에 대한 최신 업데이트입니다. Holybro가 설계하고 개발하였습니다.
주요 기능은 다음과 같습니다.
- 센서 통합 온도 제어.
- 480MHz에서 실행되는 강력한 STM32H7 마이크로 컨트롤러. 2MB의 플래시 메모리 및 1MB의 RAM.
- 온도 안정성이 높은 신규 센서.
- 내부 진동 차단 시스템.
- 듀얼 고성능, 저잡음 IMU 온보드는 까다로운 안정화 애플리케이션을 위해 설계되었습니다.
주요 기능, 조립 및 구매 링크에 대한 요약은 아래에서 확인할 수 있습니다.
Note
이 비행 컨트롤러는 제조업체의 지원을 받을 수 있습니다.
# 요약
# 기술 사양
- 메인 FMU 프로세서: STM32H743
- 32 비트 Arm® Cortex® -M7, 480MHz, 2MB 메모리, 1MB RAM
- IO 프로세서: STM32F100
- 32 비트 Arm® Cortex®-M3, 24MHz, 8KB SRAM
- 내장 센서 :
- 가속도/자이로: ICM-20689
- Accel/Gyro: BMI088 or ICM20602
- 자력계: IST8310
- 기압계: MS5611
- GPS: u-blox Neo-M8N GPS/GLONASS 수신기; 통합 자력계 IST8310
# 인터페이스
- PWM 출력 8-13개(IO에서 8개, FMU에서 5개)
- FMU의 전용 PWM/캡처 입력 6 개
- Spektrum/DSM 전용 R/C 입력
- CPPM 및 S.Bus 전용 RC 입력
- 전용 S.Bus 서보 출력 및 아날로그/PWM RSSI 입력
- 범용 시리얼 포트 5개
- 전체 흐름 제어 3개
- 1.5A 전류 제한이 있는 1 개
- I2C 포트 3개
- SPI 버스 4개
- 4 개의 칩 선택 및 6 개의 DRDY가 있는 내부 고속 SPI 센서 버스 1 개
- XXX 전용 내부 저잡음 SPI 버스 1 개
- 2 개의 칩 선택이 있는 기압계, DRDY 없음
- FRAM 전용 내부 SPI 버스 1 개
- 센서 모듈에 위치한 온도 제어 지원
- 외부 SPI 버스 1개
- 듀얼 CAN을 위한 최대 2 개의 CAN 버스
- 각 CANBus에는 개별 무음 제어 또는 ESC RX-MUX 제어가 있습니다.
- 배터리 2 개의 전압 및 전류에 대한 아날로그 입력
- 추가 아날로그 입력 2개
# 전기 데이터
- 전원 모듈 출력: 4.9~5.5V
- 최대 입력 전압: 6V
- 최대 전류 감지: 120A
- USB 전원 입력: 4.75~5.25V
- 서보 레일 입력: 0~36V
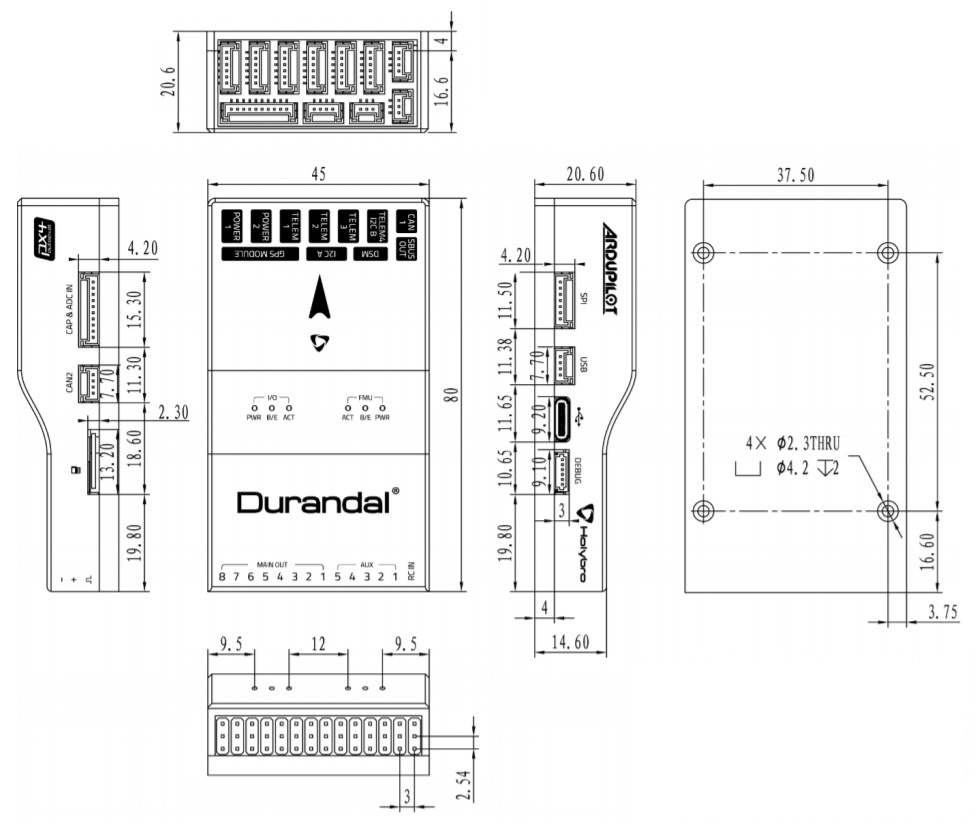
# 기계식 부품
- 크기: 80x45x20.5mm
- 중량: 68.8g
# 기타 특성
- 작동 온도 : ~ 40 ~ 85C
- 보관 온도 : -40 ~ 85C
- CE
- FCC
- RoHS 준수(무연)
자세한 내용은 Durandal 기술 데이터 시트 (opens new window)를 참조하십시오.
# 구매처
Holybro (opens new window)에서 주문 가능 합니다.
# 연결
포트 연결의 위치는 여기에 표시됩니다(아래에는 핀배열 섹션).
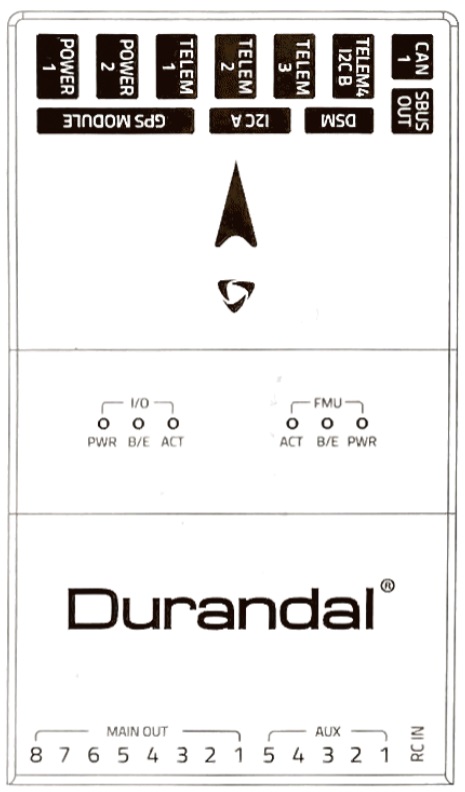
# 상단
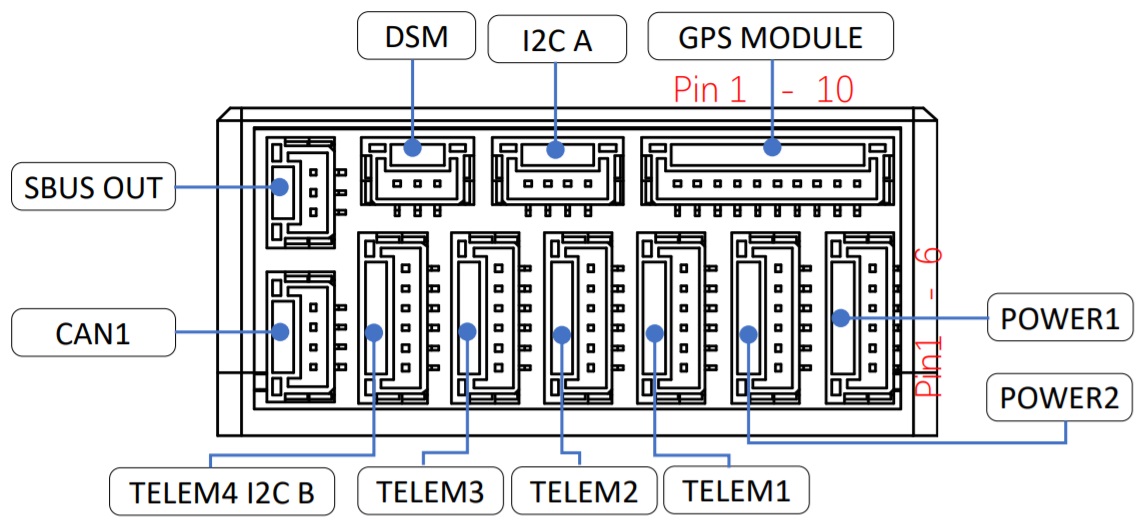
# 전면
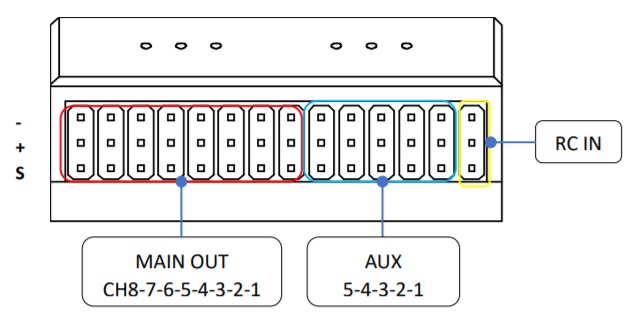
# 후면
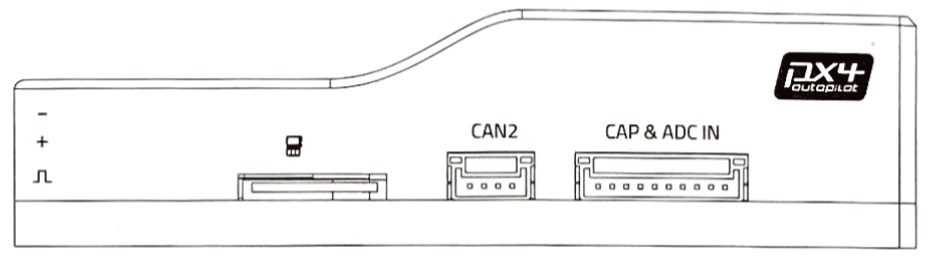
# 우측
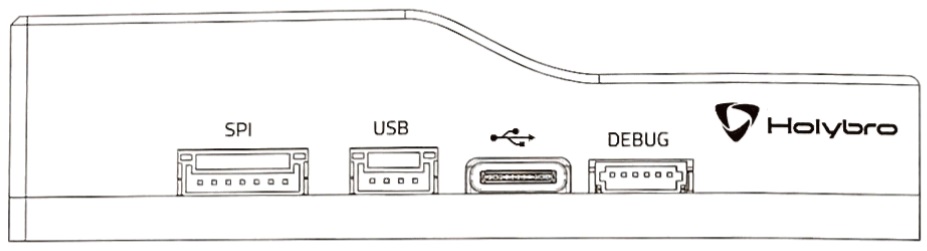
# 좌측
# 크기
모든 치수는 밀리미터 단위입니다.
# 조립 및 설정
Durandal 배선 개요는 GPS, 전원 관리 보드 등을 포함한 필수 주변 장치 조립방법을 설명합니다.
# 펌웨어 빌드
대부분의 사용자들은 펌웨어를 빌드할 필요는 없습니다. 하드웨어가 연결되면 *QGroundControl*에 의해 사전 구축되고 자동으로 설치됩니다.
:::
이 대상에 대한 PX4 빌드 방법 :
make holybro_durandal-v1_default
# 시리얼 포트 매핑
| UART | 장치 | 포트 |
|---|---|---|
| USART1 | /dev/ttyS0 | GPS1 |
| USART2 | /dev/ttyS1 | TELEM1 |
| USART3 | /dev/ttyS2 | TELEM2 |
| UART4 | /dev/ttyS3 | TELEM4/GPS2 |
| USART6 | /dev/ttyS4 | TELEM3 |
| UART7 | /dev/ttyS5 | 디버깅 콘솔 |
| UART8 | /dev/ttyS6 | PX4IO |
# 디버그 포트
PX4 시스템 콘솔과 SWD 인터페이스는 디버그 포트에서 실행됩니다.
이런 포트 모두 표준 시리얼 핀아웃을 가지고 있고 표준 FTDI 케이블 (3.3V, but it's 5V tolerant) 또는 Dronecode probe (opens new window)를 사용하여 연결할 수 있습니다. 핀아웃은 표준 Dronecode 디버그 커넥터 핀배열을 사용합니다. 이 포트의 배선 방법은 배선편을 참고하십시오.
Note
I/O 보드에 대해 노출된 디버그 포트가 없습니다.
# 주변 장치
# 지원 플랫폼 및 기체
일반 RC 서보 또는 Futaba S-Bus 서보로 제어 가능한 모든 멀티콥터/비행기/로버 또는 보트.
지원되는 운송체의 설정은 기체 정의서를 참고하십시오.
# 핀배열
Durandal 핀배열은 다음과 같습니다. 여기 (opens new window)에서 다운로드 하십시오.
# 상단 핀배열
# 전면 핀배열
# SUBS 출력 포트
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | - | - |
| 2 (황) | SBUS_OUT/RSSI_IN | +3.3V |
| 3 (흑) | GND | GND |
# DSM RC 포트
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VDD_3V3 | +3.3V |
| 2 (황) | DSM_IN | +3.3V |
| 3 (흑) | GND | GND |
# I2C A 포트
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | SCL4 | +3.3V |
| 3 (흑) | SDA4 | +3.3V |
| 4 (흑) | GND | GND |
# CAN1 포트
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | CAN H | +3.3V |
| 3 (흑) | CAN L | +3.3V |
| 4 (흑) | GND | GND |
# GPS 포트
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | TX (출력) | +3.3V |
| 3 (흑) | RX (입력) | +3.3V |
| 4 (흑) | SCL1 | +3.3V |
| 5 (흑) | SDA1 | +3.3V |
| 6 (흑) | SAFETY_SWITCH | +3.3V |
| 7 (흑) | SAFETY_SWITCH_LED | +3.3V |
| 8 (흑) | VDD_3V3 | +3.3V |
| 9 (흑) | BUZZER | +5V |
| 10 (흑) | GND | GND |
# TELEM4 I2CB 포트
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | TX (출력) | +3.3V |
| 3 (흑) | RX (입력) | - |
| 4 (흑) | SCL2 | - |
| 5 (흑) | SDA2 | +3.3V |
| 6 (흑) | GND | GND |
# TELEM3, TELEM2, TELEM1 포트
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | TX (출력) | +3.3V |
| 3 (흑) | RX (입력) | +3.3V |
| 4 (흑) | CTS (입력) | +3.3V |
| 5 (흑) | RTS (출력) | +3.3V |
| 6 (흑) | GND | GND |
# POWER 포트
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | VCC | +5V |
| 3 (흑) | CURRENT | +3.3V |
| 4 (흑) | VOLTAGE | +3.3V |
| 5 (흑) | GND | GND |
| 6 (흑) | GND | GND |
# 후면 핀배열
# MAIN 출력
| 핀 | 신호 | 전압 | + | - |
|---|---|---|---|---|
| 1 | IO_CH1 | +3.3V | VDD_SERVO | GND |
| 2 | IO_CH2 | +3.3V | VDD_SERVO | GND |
| 3 | IO_CH3 | +3.3V | VDD_SERVO | GND |
| 4 | IO_CH4 | +3.3V | VDD_SERVO | GND |
| 5 | IO_CH5 | +3.3V | VDD_SERVO | GND |
| 6 | IO_CH6 | +3.3V | VDD_SERVO | GND |
| 7 | IO_CH7 | +3.3V | VDD_SERVO | GND |
| 8 | IO_CH8 | +3.3V | VDD_SERVO | GND |
# AUX 출력
| 핀 | 신호 | 전압 | + | - |
|---|---|---|---|---|
| 1 | FMU_CH1 | +3.3V | VDD_SERVO | GND |
| 2 | FMU_CH2 | +3.3V | VDD_SERVO | GND |
| 3 | FMU_CH3 | +3.3V | VDD_SERVO | GND |
| 4 | FMU_CH4 | +3.3V | VDD_SERVO | GND |
| 5 | FMU_CH5 | +3.3V | VDD_SERVO | GND |
# RC 입력
| 핀 | 신호 | 전압 |
|---|---|---|
| S | SBUS_IN/PPM_IN | +3.3V |
| + | VCC | +5V |
| - | GND | GND |
# 우면 핀배열
# CAN2 포트
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | CAN H | +3.3V |
| 3 (흑) | CAN L | +3.3V |
| 4 (흑) | GND | GND |
# CAP & ADC IN 포트
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | FMU_CAP6 | +3.3V |
| 3 (흑) | FMU_CAP5 | +3.3V |
| 4 (흑) | FMU_CAP4 | +3.3V |
| 5 (흑) | FMU_CAP3 | +3.3V |
| 6 (흑) | FMU_CAP2 | +3.3V |
| 7 (흑) | FMU_CAP1 | +3.3V |
| 8 (흑) | ADC1_SPARE_1 | +3.3V ++ |
| 9 (흑) | ADC1_SPARE_2 | +6.6V++ |
| 10 (흑) | GND | GND |
WARNING
\ ++ 핀 8, 9에 연결된 센서는 표시된 전압을 초과하는 신호를 전송하지 않아야 합니다.
# 좌면 핀배열
# 디버그 포트
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VT | +3.3V |
| 2 (흑) | TX | +3.3V |
| 3 (흑) | RX | +3.3V |
| 4 (흑) | SWDIO | +3.3V |
| 5 (흑) | SWCLK | +3.3V |
| 6 (흑) | GND | GND |
# SPI 포트
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | SCK | +3.3V |
| 3 (흑) | MISO | +3.3V |
| 4 (흑) | MOSI | +3.3V |
| 5 (흑) | CS1 | +3.3V |
| 6 (흑) | CS2 | +3.3V |
| 7 (흑) | GND | GND |
# USB 포트
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VBUS | +5V |
| 2 (흑) | DM | +3.3V |
| 3 (흑) | DP | +3.3V |
| 4 (흑) | GND | GND |