# 시뮬레이션
시뮬레이터는 PX4 비행 코드가 시뮬레이션된 가상 "세계"에서 컴퓨터로 모델링된 기체를 제어합니다. QGroundControl, 오프보드 API 또는 무선 컨트롤러, 게임패드를 사용하여 실제 기체와 같이 상호 작용합니다.
TIP
시뮬레이션은 실제 세계에서 비행전에 PX4 코드 변경 사항을 테스트할 수 있는 빠르고 쉽고 안전한 방법입니다. 실험할 기체가 없은 경우 PX4로 비행을 시작하는 것도 좋은 방법입니다.
PX4 비행 스택은 컴퓨터(동일한 컴퓨터 또는 동일한 네트워크의 다른 컴퓨터)에서 실행되는 SITL(Software In the Loop) 시뮬레이션과 비행 콘트롤러의 시뮬레이션 펌웨어를 사용한 Hardware In the Loop(HITL) 시뮬레이션을 모두 지원합니다.
사용 가능한 시뮬레이터와 설정 방법을 다음 섹션에서 설명합니다. 다른 섹션에서는 시뮬레이터 작동에 관현 정보를 제공하며, 시뮬레이터를 사용할 필요는 없습니다.
# 지원되는 시뮬레이터
아래의 시뮬레이터들은 HITL과 SITL 시뮬레이션용으로 PX4와 연동됩니다.
| 시뮬레이터 | 설명 |
|---|---|
| Gazebo | 이 시뮬레이터를 적극 권장합니다. 물체 회피와 컴퓨터 비전 테스트에 매우 적합한 강력한 3D 시뮬레이션 환경입니다. 다중 차량시뮬레이션에도 사용할 수 있으며 일반적으로 차량 제어 자동화를 위한 도구 모음인 ROS와 함께 사용됩니다. 지원 차량: 쿼드(Iris 및 Solo, Hex48(T0) 일반 쿼드 델타 VTOL, 테일시터, 비행기, 로버, 잠수함 |
| FlightGear | 물리적, 시각적으로 사실적인 시뮬레이션을 제공합니다. 특히 뇌우, 눈, 비과 우박을 포함한 다양한 기상 조건을 시뮬레이션할 수 있으며, 열과 다양한 유형의 대기 흐름을 시뮬레이션할 수 있습니다. 다중 차량 시뮬레이션도 지원됩니다. 지원 차량: 비행기, 오토자이로, 로버 |
| JSBSim | 고급 비행 역학 모델 시뮬레이션을 제공합니다. 이것은 풍동 데이터를 기반으로 현실적인 비행 역학을 모델링할 수 있습니다. 지원 차량: 평면, 쿼드, 육각 |
| jMAVSim | 콥터 유형의 차량을 비행할 수 있는 간단한 멀티콥터 시뮬레이터입니다. 설정이 간단하며, 기체가 이륙, 비행, 착륙할 수 있으며, 다양한 장애 조건(예: GPS 장애)에 적절하게 반응 여부를 테스트할 수 있습니다. 다중 차량 시뮬레이션에도 사용할 수 있습니다. 지원 차량: 쿼드 |
| AirSim | 물리적 및 시각적으로 사실적인 시뮬레이션을 제공하는 크로스 플랫폼 시뮬레이터입니다. 이 시뮬레이터는 리소스 집약적이며, 다른 시뮬레이터보다 강력한 컴퓨터가 필요합니다. 지원 차량: Iris(MultiRotor 모델 및 X 구성의 PX4 QuadRotor 구성). |
| Simulation-In-Hardware (SIH) | An alternative to HITL that offers a hard real-time simulation directly on the hardware autopilot. This simulator is implemented in C++ as a PX4 module directly in the Firmware code (opens new window). Supported Vehicles: Plane, Quad, Tailsitter |
| Ignition Gazebo | Ignition Gazebo는 인기 있는 로봇 공학 시뮬레이터 Gazebo에서 파생되었으며, 고급 렌더링, 물리학 및 센서 모델을 제공합니다. 지원 차량: 쿼드 |
시뮬레이터를 설정 사용 방법에 대한 지침은 위에 링크를 참고하십시오.
이 항목의 나머지 부분은 시뮬레이션 인프라 작동 방식에 대한 "다소 일반적인" 설명입니다. 시뮬레이터를 사용할 필요는 없습니다.
# Simulator MAVLink API
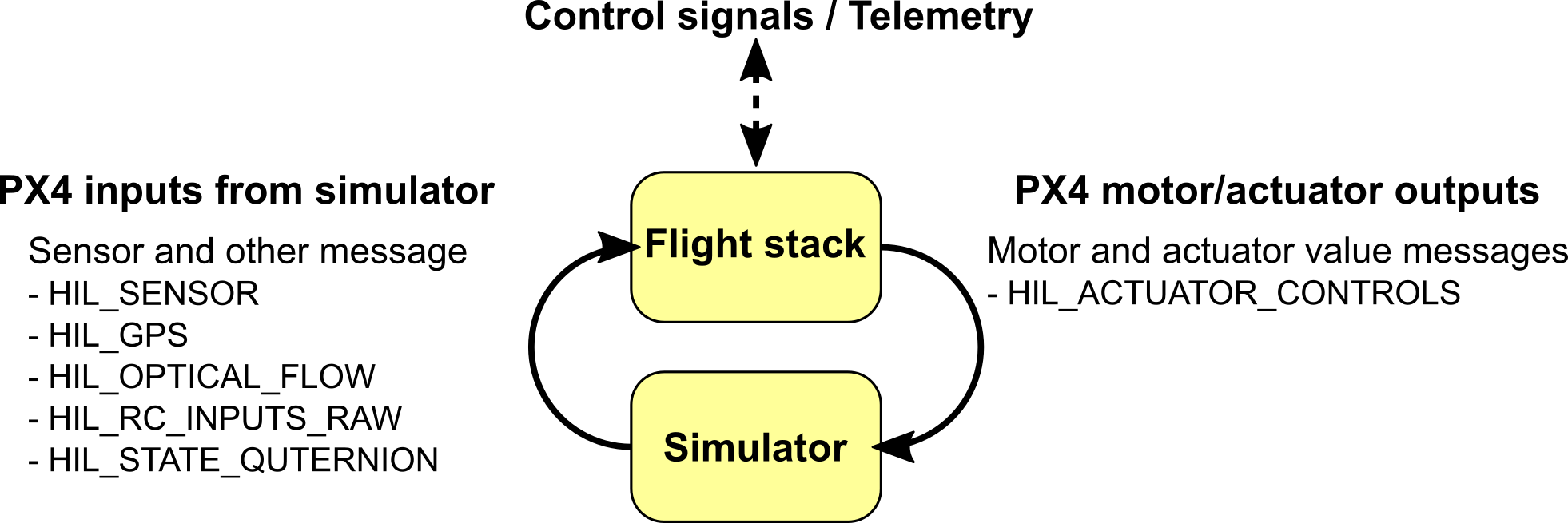
모든 시뮬레이터는 Simulator MAVLink API를 사용하여 PX4와 통신합니다. 이 API는 시뮬레이션된 세계에서 PX4로 센서 데이터를 제공하고, 시뮬레이션된 차량에 적용될 비행 코드에서 모터 및 액추에이터 값을 반환하는 MAVLink 메시지 세트를 정의합니다. 아래 이미지는 메시지 흐름을 나타냅니다.
PX4 SITL 빌드는 [simulator_mavlink.cpp](https://github.com/PX4/PX4-Autopilot/blob/master/src/modules/simulator/simulator_mavlink.cpp)를 사용하여 이러한 메시지를 처리하는 반면, HIL 모드의 하드웨어 빌드는 [mavlink_receiver.cpp](https://github.com/PX4/PX4-Autopilot/blob/master/src/modules/mavlink/mavlink_receiver.cpp)를 사용합니다. 시뮬레이터의 센서 데이터는 PX4 uORB 주제에 기록됩니다. 모든 모터/액츄에이터가 차단되지만, 내부 소프트웨어는 완전하게 작동합니다.
메시지는 아래에 설명되어 있습니다(자세한 내용은 링크 참조).
| 메시지 | 방향 | 설명 |
|---|---|---|
| MAV_MODE:MAV_MODE_FLAG_HIL_ENABLED (opens new window) | 없음 | 시뮬레이션 모드 플래그입니다. 모든 모터/액추에이터가 차단되지만, 내부 소프트웨어는 완전하게 작동합니다. |
| HIL_ACTUATOR_CONTROLS (opens new window) | PX4 → Sim | PX4 제어 출력(모터, 액추에이터). |
| HIL_SENSOR (opens new window) | Sim → PX4 | NED 본체 프레임의 SI 단위로 시뮬레이션된 IMU 판독값. |
| HIL_GPS (opens new window) | Sim → PX4 | 시뮬레이션된 GPS RAW 센서 값입니다. |
| HIL_OPTICAL_FLOW (opens new window) | Sim → PX4 | 흐름 센서에서 시뮬레이션된 광류(예: PX4FLOW 또는 광학 마우스 센서) |
| HIL_STATE_QUATERNION (opens new window) | Sim → PX4 | 실제 "시뮬레이션된" 차량 위치, 자세, 속도 등이 포함됩니다. 이것은 분석 및 디버깅에 대한 PX4의 추정치와 비교 기록될 수 있습니다(예: 노이즈가 있는(시뮬레이션된) 센서 입력에 대해 추정기가 얼마나 잘 작동하는 지 확인). |
| HIL_RC_INPUTS_RAW (opens new window) | Sim → PX4 | 수신된 RC 채널의 RAW 값입니다. |
# 기본 PX4 MAVLink UDP 포트
기본적으로 PX4는 지상제어국(예: QGroundControl), Offboard API(예: MAVSDK, MAVROS) 및 시뮬레이터 API(예: Gazebo)와 MAVLink 통신을 위하여 UDP 포트를 사용합니다. 해당 포트는 다음과 같습니다:
- PX4의 원격 UDP 포트 14550은 지상관제국 통신에 사용됩니다. GCS는 이 포트에서 연결 수신을 예상합니다. QGroundControl은 기본적으로 이 포트로 수신합니다.
- PX4의 원격 UDP 포트 14540은 오프보드 API 통신에 사용됩니다. 오프보드 API는 이 포트에서 연결 수신을 예상합니다. :::note 다중 차량 시뮬레이션은 각 인스턴스에 대해 별도의 원격 포트를 사용하며
14540에서14549까지 순차적으로 할당합니다. (추가 인스턴스는 모두14549포트를 사용합니다). ::: - 시뮬레이터의 로컬 TCP 포트 4560은 PX4 통신에 사용됩니다. PX4는 이 포트를 수신하고, 시뮬레이터는 이 포트에 데이터를 브로드캐스트하여 통신을 시작합니다.
GCS
및 오프보드 API용 포트는 파일에서 설정되는 반면에, 시뮬레이터 브로드캐스트 포트는 시뮬레이션 MAVLink 모듈에서 하드 코딩되어 있습니다. See System Startup to learn more.
# SITL 시뮬레이션 환경
아래 다이어그램은 지원되는 시뮬레이터에 대한 일반적인 SITL 시뮬레이션 환경을 나타냅니다.

시스템의 차이점은 UDP를 통해 연결되며, 동일 컴퓨터 또는 동일 네트워크의 다른 컴퓨터에서도 실행됩니다.
- PX4는 시뮬레이션 전용 모듈을 사용하여, 시뮬레이터의 로컬 TCP 포트 4560에 연결합니다. 그런 다음 시뮬레이터는 위에서 설명한 시뮬레이터 MAVLink API를 사용하여 PX4와 정보를 교환합니다. SITL 및 시뮬레이터의 PX4는 동일 컴퓨터 또는 동일 네트워크의 다른 컴퓨터에서 실행할 수 있습니다. :::note 시뮬레이터는 또한 microRTPS 브리지(PX4-FastRTPS 브리지)를 사용하여 PX4와 직접 상호작용할 수 있습니다(즉, MAVLink가 아닌 UORB 주제를 통하여). 이 접근 방법은 Gazebo 다중 차량 시뮬레이션에서 사용됩니다. :::
- PX4는 일반 MAVLink 모듈을 사용하여, MAVSDK 또는 ROS와 같은 외부 개발자 API와 지상국에 연결합니다.
- 지상국은 PX4의 원격 UDP 포트를 수신합니다:
14550 - 외부 개발자 API는 PX4의 원격 UDP 포트인
14540을 수신합니다. 다중 차량 시뮬레이션의 경우 PX4는14540에서14549까지 각 인스턴스에 대해 별도의 원격 포트를 순차적으로 할당합니다(추가 인스턴스는 모두 포트14549사용).
- 지상국은 PX4의 원격 UDP 포트를 수신합니다:
- PX4는 다수의 로컬 UDP 포트(
14580,18570)를 정의하며, 이는 컨테이너 또는 가상 머신에서 실행되는 PX4와 네트워킹시에 가끔 사용됩니다. 이는 "일반적인" 용도로는 권장되지 않으며, 향후 변경될 수 있습니다. - 직렬 연결로 QGroundControl을 통하여 조이스틱/게임패드를 연결할 수 있습니다.
일반 빌드 시스템 SITL make 구성 대상을 사용하는 경우(다음 섹션 참조), SITL과 시뮬레이터가 모두 동일 컴퓨터에서 실행되고 위의 포트가 자동으로 설정됩니다. 추가 MAVLink UDP 연결을 구성하거나 빌드 구성 및 초기화 파일에서 시뮬레이션 환경을 수정할 수 있습니다.
# SITL 시뮬레이션 시작/구축
빌드 시스템으로 SITL에서 PX4를 빌드하여 시뮬레이터를 시작/연결할 수 있습니다. 구문(단순화)은 다음과 같습니다.
make px4_sitl simulator[_vehicle-model]
여기서 simulator는 gazebo, jmavsim 또는 기타 시뮬레이터이고, vehicle-model은 해당 시뮬레이터에서 지원하는 특정 차량 유형입니다. jMAVSim 멀티콥터만 지원하는 반면에 Gazebo는 다양한 유형을 지원합니다.
아래에는 여러가지 예가 있으며, 각 시뮬레이터의 개별 페이지에는 더 많은 예제들이 있습니다.
# Start Gazebo with plane
make px4_sitl gazebo_plane
# Start Gazebo with iris and optical flow
make px4_sitl gazebo_iris_opt_flow
# Start JMavSim with iris (default vehicle model)
make px4_sitl jmavsim
# Start PX4 with no simulator (i.e. to use your own "custom" simulator)
make px4_sitl none_iris
시뮬레이션은 환경 변수를 통하여 추가로 설정이 가능합니다.
PX4_ESTIMATOR: 사용할 추정기를 설정합니다. 가능한 옵션은ekf2(기본값),lpe(더 이상 사용되지 않음)입니다. 시뮬레이션을 실행전에export PX4_ESTIMATOR=lpe를 통하여 설정할 수 있습니다.
여기에 설명된 구문은 단순화되었으며, make를 통해 구성할 수 있는 다른 옵션들이 많이 있습니다(예: IDE 또는 디버거에 연결하도록 설정). 자세한 내용은 코드 작성 > PX4 빌드 타겟 만들기를 참고하십시오.
# 실제보다 빠른 속도로 시뮬레이션 실행
SITL은 jMAVSim 또는 Gazebo를 사용하여, 실시간보다 빠르거나 느리게 실행할 수 있습니다.
속도 계수는 환경 변수 PX4_SIM_SPEED_FACTOR를 사용합니다. 예를 들어, 실시간 속도의 2배로 jMAVSim 시뮬레이션을 실행하려면:
PX4_SIM_SPEED_FACTOR=2 make px4_sitl jmavsim
실시간 절반으로 실행하려면:
PX4_SIM_SPEED_FACTOR=0.5 make px4_sitl jmavsim
EXPORT를 사용하여 현재 세션의 모든 SITL 실행 요소를 적용할 수 있습니다.
export PX4_SIM_SPEED_FACTOR=2
make px4_sitl jmavsim
Note
어느 시점에서 IO 또는 CPU는 컴퓨터의 가능한 속도를 제한하고 "자동으로" 느려집니다. 강력한 데스크탑 컴퓨터는 일반적으로 약 6-10x에서 시뮬레이션할 수 있으며, 노트북의 경우의 최고 속도는 약 3-4x 입니다.
PX4가 데이터 링크 시간 초과를 감지하지 않도록, 시뮬레이션 속도에 비례하여 매개변수 [COM_DL_LOSS_T](../advanced_config/parameter_reference.md#COM_DL_LOSS_T) 값을 증가시키십시오. 예를 들어 `COM_DL_LOSS_T`가 실시간으로 10인 경우 10배 시뮬레이션 속도에서 100으로 증가합니다.
# 잠금단계시뮬레이션
PX4 SITL과 시뮬레이터(jMAVSim 또는 Gazebo)는 잠금단계로 실행되도록 설정되었습니다. What this means is that PX4 and the simulator wait on each other for sensor and actuator messages, rather than running at their own speeds.
Note
잠금단계를 사용하여 실시간보다 빠르거나 느리게 시뮬레이션을 실행할 수 있으며, 코드 단계별 실행을 위하여 일시 중지할 수 있습니다.
잠금단계의 순서는 다음과 같습니다.
- 시뮬레이션은 타임스탬프
time_usec가 포함된 센서 메시지 HIL_SENSOR (opens new window)를 전송하여 PX4의 센서 상태와 시간을 업데이트합니다. - PX4는 이것을 수신하고 상태 추정, 제어 등을 한 번 반복하고, 액추에이터 메시지 HIL_ACTUATOR_CONTROLS (opens new window)를 전송합니다.
- 시뮬레이션은 액추에이터/모터 메시지를 수신후에, 물리적 시뮬레이션후에 PX4로 전송할 다음 센서 메시지를 계산합니다.
시스템은 시뮬레이션 시간을 포함하는 센서 메시지를 전송하는 "프리휠링" 기간으로 시작하므로, 초기화되고 액추에이터 메시지로 응답시까지 PX4를 실행합니다.
# 잠금단계 시뮬레이션 비활성화
SITL이 이 기능을 지원하지 않는 시뮬레이터와 함께 사용되는 경우에는 잠금단계 시뮬레이션을 비활성화할 수 있습니다. 이 경우 시뮬레이터와 PX4는 호스트 시스템 시간을 사용하며 서로를 기다리지 않습니다.
To disable lockstep in PX4, run make px4_sitl_default boardconfig and set the BOARD_NOLOCKSTEP "Force disable lockstep" symbol which is located under toolchain.
To disable lockstep in Gazebo, edit the model SDF file (opens new window) and set <enable_lockstep>false</enable_lockstep>.
jMAVSim에서 잠금 단계를 비활성화하려면 jmavsim_run.sh (opens new window)에서 -l을 제거하거나, Java 바이너리가 -lockstep 플래그 없이 시작되었는지 확인하십시오.
# 시작 스크립트
스크립트는 매개변수 설정과 시작 모듈 제어에 사용됩니다. ROMFS/px4fmu_common/init.d-posix (opens new window) 디렉토리에 있으며, rcS 파일이 진입점입니다. 자세한 내용은 시스템 시작을 참고하십시오.
# 안정장치 및 센서/하드웨어 오류 시뮬레이션
안전장치 시뮬레이션에서는 GPS 오류 및 배터리 소모와 같은 안전 비상안전장치를 트리거 방법을 설명합니다.
# HITL 시뮬레이션 환경
HITL(Hardware-in-the-Loop) 시뮬레이션을 사용하여, 일반 PX4 펌웨어가 실제 하드웨어에서 실행됩니다. 문서화된 HITL 시뮬레이션 환경: HITL 시뮬레이션.
# 조이스틱/게임패드 통합
QGroundControl 데스크톱 버전은 USB 조이스틱/게임패드에 연결하여 MAVLink로 PX4에 이동 명령과 버튼 누름을 전송합니다. 이것은 SITL 및 HITL 시뮬레이션 모두에서 작동하며, 시뮬레이션 차량을 직접 제어할 수 있습니다. 조이스틱이 없는 경우 QGroundControl의 화면 가상 썸스틱을 사용하여 차량을 제어할 수도 있습니다.
설정 정보는 QGroundControl 사용자 가이드를 참고하십시오.
# 카메라 시뮬레이션
PX4는 Gazebo 시뮬레이션 환경에서 정지 영상과 동영상 캡처를 할 수 있습니다. 설정 방법은 Gazebo > 비디오 스트리밍을 참고하십시오.
시뮬레이션 카메라는 MAVLink 카메라 프로토콜 (opens new window)을 구현하는 gazebo 플러그인입니다.. PX4는 다른 MAVLink 카메라와 동일 방법으로 카메라와 연결/통합합니다.
MAVLink 카메라와 함께 사용할 카메라 트리거 드라이버를 구성하려면 TRIG_INTERFACE를
3으로 설정합니다. :::tip 이 모드에서 드라이버는 이미지 캡처가 요청시에 CAMERA_TRIGGER (opens new window) 메시지를 전송합니다. 자세한 내용은 카메라를 참고하십시오. :::PX4는 GCS와 (시뮬레이터) MAVLink 카메라 사이의 모든 카메라 명령을 전달하여야 합니다. 그림과 같이
-f플래그로 MAVLink를 시작하고 새 연결을 위한 UDP 포트를 지정하면 됩니다.mavlink start -u 14558 -o 14530 -r 4000 -f -m cameraNote
카메라 MAVLink 메시지 이상은 전달되지만, 카메라는 관련이 없는 것으로 간주되는 메시지들은 무시합니다. :::
다른 시뮬레이터에서도 동일한 접근 방식을 사용하여 카메라 지원을 구현할 수 있습니다.
# 원격 서버에서 시뮬레이션 실행
한 컴퓨터에서 시뮬레이터를 실행하고 동일 네트워크(또는 적절한 라우팅이 있는 다른 네트워크)의 다른 컴퓨터에서 시뮬레이터에 접근할 수 있습니다. 시뮬레이션 차량을 실행하는 실제 보조 컴퓨터에서 실행되는 드론 애플리케이션을 테스트하는 경우에 유용합니다.
(네트워크 스팸과 서로 다른 시뮬레이션이 서로 간섭하는 것을 방지하기 위하여) PX4는 기본적으로 패킷을 외부 인터페이스로 라우팅하지 않기 때문에 "즉시" 작동하지 않습니다. 대신 내부적으로 트래픽을 "localhost"로 라우팅합니다.
아래에 설명된 대로 외부 인터페이스에서 UDP 패킷을 사용하는 여러 방법이 있습니다.
# MAVLink 라우터 사용
mavlink-router (opens new window)는 localhost에서 외부 인터페이스로 패킷을 라우팅하는 데 사용할 수 있습니다.
한 컴퓨터에서 실행 중인 SITL(UDP 포트 14550에서 localhost로 MAVLink 트래픽 전송)과 다른 컴퓨터에서 실행 중인 QGC(예: 주소 10.73.41.30) 간에 패킷을 라우팅하려면 다음을 수행할 수 있습니다.
- 다음 명령으로 mavlink-router를 실행합니다.
mavlink-routerd -e 10.73.41.30:14550 127.0.0.1:14550 - mavlink-router conf 파일을 사용하십시오.
[UdpEndpoint QGC] Mode = Normal Address = 10.73.41.30 Port = 14550 [UdpEndpoint SIM] Mode = Eavesdropping Address = 127.0.0.1 Port = 14550
Note
mavlink-router 설정 방법은 여기 (opens new window)를 참고하십시오.
# UDP 브로드캐스트 활성화
mavlink 모듈은 기본적으로 localhost로 라우팅되지만, -p 옵션을 사용하여 하트비트의 UDP 브로드캐스트를 활성화할 수 있습니다. 그러면, 네트워크의 모든 원격 컴퓨터가 적절한 포트(예: QGroundControl의 경우 14550)를 수신하여 시뮬레이터에 연결할 수 있습니다.
UDP
브로드캐스팅은 네트워크에서 실행 중인 시뮬레이션이 하나만 있는 경우에 간단하게 연결되도록 합니다. Do not use this approach if there are multiple simulations running on the network (you might instead publish to a specific address).
mavlink start가 호출되는 적절한 설정 파일에서 이 작업을 수행하여야 합니다. 예: /ROMFS/px4fmu_common/init.d-posix/rcS (opens new window).
# 특정 주소로 스트리밍 활성화
mavlink 모듈은 기본적으로 localhost로 라우팅되지만, -t 옵션을 사용하여 스트리밍 외부 IP 주소를 지정합니다. 지정된 원격 컴퓨터가 적절한 포트(예: QGroundControl의 경우 14550)를 수신하여 시뮬레이터에 연결할 수 있습니다.
mavlink start가 호출되는 설정 파일에서 이 작업을 수행하여야 합니다. 예: /ROMFS/px4fmu_common/init.d-posix/rcS (opens new window).
# SSH 터널링
SSH 터널링을 사용하면 시뮬레이션 컴퓨터와 이를 사용하는 시스템이 동일 네트워크에 있지 않아도 됩니다.
Note
유사하게 VPN을 사용하여 외부 인터페이스(동일 네트워크 또는 다른 네트워크에서)에 터널을 제공할 수 있습니다.
터널을 만드는 한 가지 방법은 SSH 터널링 옵션을 사용하는 것입니다. 터널 자체는 localhost에서 다음 명령을 실행하여 만들 수 있습니다. 여기서 remote.local은 원격 컴퓨터의 이름입니다.
ssh -C -fR 14551:localhost:14551 remote.local
UDP 패킷은 SSH를 통해 라우팅될 수 있도록 TCP 패킷으로 변환되어야 합니다. The netcat (opens new window) utility can be used on both sides of the tunnel - first to convert packets from UDP to TCP, and then back to UDP at the other end.
QGC가 *netcat*을 실행하기 전에 실행되어야 합니다.
QGroundControl 컴퓨터에서 UDP 패킷 변환은 다음 명령어로 구현할 수 있습니다.
mkfifo /tmp/tcp2udp
netcat -lvp 14551 < /tmp/tcp2udp | netcat -u localhost 14550 > /tmp/tcp2udp
SSH 터널의 시뮬레이터 측에서 명령어는 다음과 같습니다.
mkfifo /tmp/udp2tcp
netcat -lvup 14550 < /tmp/udp2tcp | netcat localhost 14551 > /tmp/udp2tcp
포트 번호 14550은 QGroundControl 또는 다른 GCS에 연결하는 데 유효하지만, 다른 끝점(예: 개발자 API 등)에 맞게 조정하여야 합니다.
터널은 이론적으로 무한정 실행되지만, 문제가 발생하면 netcat 연결을 다시 시작할 수 있습니다.
QGC_remote_connect.bash (opens new window) 스크립트를 QGC 컴퓨터에서 실행하여 위의 지침을 자동으로 설정/실행할 수 있습니다. 시뮬레이션은 원격 서버에서 실행 중이어야 하며, 해당 서버로 SSH 연결이 가능하여야 합니다.