# 飞控方向的高级调参
可以通过手动调参来修正无人机的方向和地平线水准,以校正传感器芯片存在的微小不对准或校准误差。
注解
不推荐普通用户使用该教程。 对于基本设置,请遵循下面链接的说明:
如果存在持续的漂移偏差(通常存在于多旋翼中,但不仅限于多旋翼),一个比较好的方法是可以通过微调偏移角度参数的帮助,去除该偏差,而不是使用遥控发射器的微调器。 这样,飞机在完全自主的飞行中将保持调整修正。
# 方向参数设置
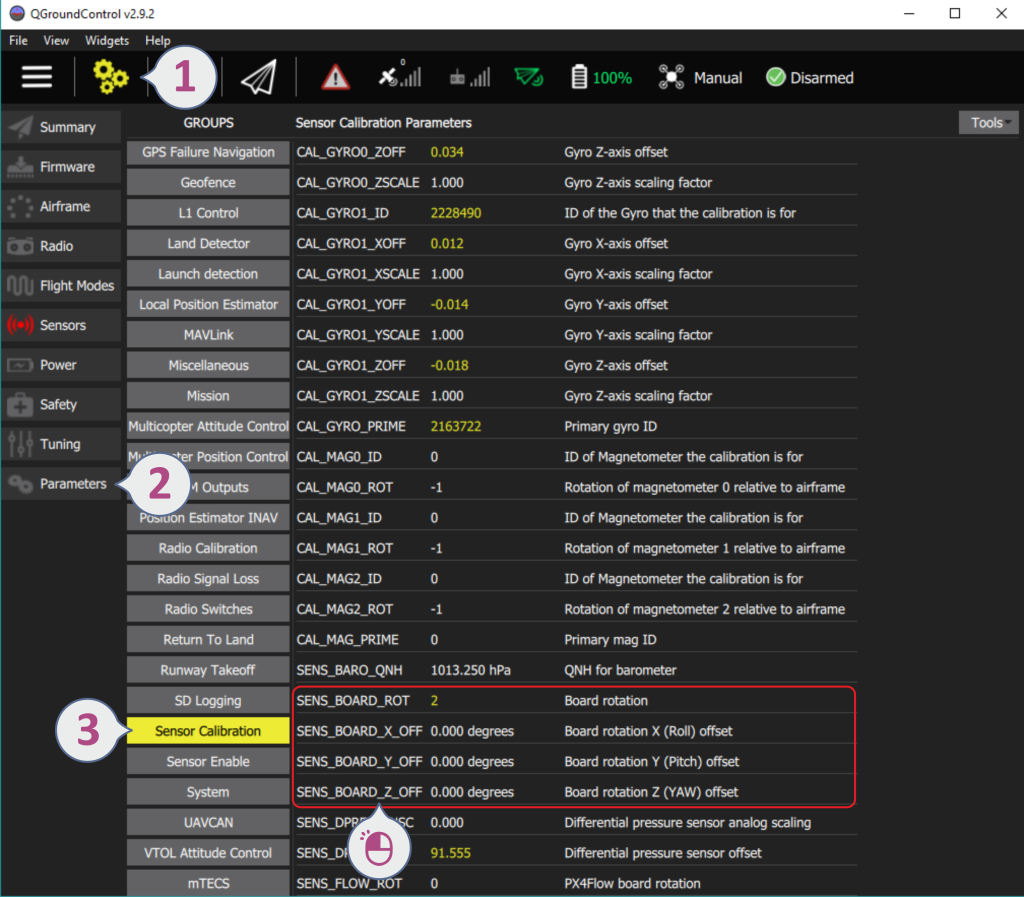
更改方向参数:
- Open QGroundControl menu: Settings > Parameters > Sensor Calibration.
- 更改以下参数:
# 参数信息
The SENS_BOARD_ROT parameter defines the rotation relative to the platform, while the X,Y and Z fine tuning offsets are fixed relative to the board itself. 实质上是微调的偏移量被添加到了 SENS_BOARD_ROT 角度中, 为了获得飞控的偏航,俯仰和横滚方向的总偏移角度。
SENS_BOARD_ROT
该参数定义了 FMU 飞控板相对于飞机平台的旋转角。 可选值有:
- 0 = 无旋转
- 1 = 偏航 45°
- 2 = 偏航 90°
- 3 = 偏航 135°
- 4 = 偏航 180°
- 5 = 偏航 225°
- 6 = 偏航 270°
- 7 = 偏航 315°
- 8 = 滚转 180°
- 9 = 滚转 180°, 偏航 45°
- 10 = 滚转 180°, 偏航 90°
- 11 = 滚转 180°, 偏航 135°
- 12 = 俯仰 180°
- 13 = 滚转 180°, 偏航 225°
- 14 = 滚转 180°, 偏航 270°
- 15 = 滚转 180°, 偏航 315°
- 16 = 滚转 90°
- 17 = 滚转 90°, 偏航 45°
- 18 = 滚转 90°, 偏航 90°
- 19 = 滚转 90°, 偏航 135°
- 20 = 滚转 270°
- 21 = 滚转 270°, 偏航 45°
- 22 = 滚转 270°, 偏航 90°
- 23 = 滚转 270°, 偏航 135°
- 24 = 俯仰 90°
- 25 = 俯仰角 270°
SENS_BOARD_X_OFF
绕 PX4FMU 的 X 轴或者 横滚轴旋转角度。 正角度增加在逆时针方向,负角度增加在顺时针方向。
SENS_BOARD_Y_OFF
绕 PX4FMU 的 Y 轴或者俯仰轴旋转角度。 正角度增加在逆时针方向,负角度增加在顺时针方向。
SENS_BOARD_Z_OFF
绕 PX4FMU 的 Z 轴或者偏航轴旋转角度。 正角度增加在逆时针方向,负角度增加在顺时针方向。