# 距离传感器(测距仪)
距离传感器提供的距离测量可用于地形跟随、地形保持(即精确悬停拍摄)、改善着陆行为(距离辅助)、监管高度限制警告、碰撞预防等。
本节列出了PX4支持的距离传感器(链接到更详细的文档)、所有测距仪所需的通用配置、测试和模拟信息。 更详细的设置和配置信息在下方(和侧边栏)的主题链接中提供


# 支持的测距仪
# ARK Flow
ARK Flow 是一个开源的飞行时间 (ToF) 和光流模块, 能够测量从 8cm 到 30m 的距离. 它可以通过CAN1接口连接至飞控,允许通过CAN2接口添加传感器。 它运行 PX4 固件,支持UAVCAN 固件更新,并被打包成一个小尺寸。
# Holybro ST VL53L1X 激光雷达
VL53L1X (opens new window)是最先进的飞行时间(ToF)激光测距传感器,增强了ST FlightSense™ 产品系列。 它是市场上速度最快的微型 ToF 传感器,精确测距可达 4 m,快速测距频率可达 50 Hz。
它带有一个 JST GHR 4 针连接器,与 Pixhawk 4、Pixhawk 5X和其他遵循 Pixhawk 连接器标准 (opens new window) 的飞行控制器上的 I2C 端口兼容。
# 激光雷达精简版
激光雷达精简版 是一款紧凑、高性能的光学远距离测量测距仪。 它的传感器范围为 (5cm - 40m),可以连接到 PWM 或 I2C 端口。
# MaxBotix I2CXL-MaxSonar-EZ
MaxBotix I2CXL-MaxSonar-EZ (opens new window) 测距 有许多基于声纳的相对短程测距仪 ,适用于辅助起飞/着陆和避免碰撞。 这些可以使用 I2C 端口连接。
测距仪通过使用参数SENS_EN_MB12XX启用。
# Lightware LIDARs
Lightware SFxx Lidar 提供一个宽范围的轻量级激光高度计,适用于许多无人机应用。
PX4 支持: SF11/c 和 SF/LW20. PX4 也可用于一下停产的型号: SF02, SF10/a, SF10/b, SF10/c.
# TeraRanger 测距仪
TeraRanger 提供了一些基于红外光飞行时间(ToF)技术的轻量级距离测量传感器。 他们通常比声纳更快、范围更大、比基于激光的系统更小、更轻。
PX4 提供以下通过 I2C总线连接的型号:TeraRanger One, TeraRanger Evo 60m 和 TeraRanger Evo 600Hz。
# Ainstein US-D1 标准雷达高度计
The Ainstein US-D1 Standard Radar Altimeter is compact microwave rangefinder that has been optimised for use on UAVs. 它有大约50米的感测范围。 该产品的一个特别优势是它可以在所有天气条件下和所有地形类型(包括水)上有效运行。
# LeddarOne
LeddarOne 是一种小型激光雷达模块,具有窄而漫反射的光束,在一个坚固、可靠、经济高效的组件中提供出色的整体探测范围和性能。 它的遥感范围从1厘米到40米不等,需要与UART/串行总线连接。
# TFmini
Benewake TFmini Lidar 是一个的小巧、低成本、低功率的激光测距拥有 12m 的测量范围
# PSK-CM8JL65-CC5
The Lanbao PSK-CM8JL65-CC5 ToF Infrared Distance Measuring Sensor is a very small (38 mm x 18mm x 7mm, <10g) IR distance sensor with a 0.17m-8m range and millimeter resolution. It must be connected to a UART/serial bus.
# Avionics Anonymous UAVCAN 激光高度计接口
Avionics Anonymous UAVCAN 激光高度计接口 允许几种常见的测距仪 (例如 Lightware SF11/c, SF30/D, 等) 连接到 UAVCAN 总线, 这是一个比 I2C 更强大的接口.
# 配置/设置
测距仪通常连接到串口(PWM)或者 I2C 接口(取决于设备驱动),并通过设置特定的参数在端口上启用。
The hardware and software setup that is specific to each distance sensor is covered in their individual topics.
The generic configuration that is common to all distance sensors, covering both the physical setup and usage, is given below.
# 常规配置
The common rangefinder configuration is specified using EKF2_RNG_* parameters. 这些包括(非详尽):
- EKF2_RNG_POS_X, EKF2_RNG_POS_Y, EKF2_RNG_POS_Z - 测距仪在 X、Y、Z 方向上与车辆重心的偏移量。
- EKF2_RNG_PITCH - 0 度值(默认值)对应于测距仪与车辆垂直轴精确对齐(即垂直向下),而 90 度表示测距仪指向前方。 如果使用非零间距,则使用简单的三角法计算到地面的距离。
- EKF2_RNG_DELAY - 数据从传感器到达估计器的近似延迟。
- EKF2_RNG_SFE - Range finder range dependent noise scaler.
- EKF2_RNG_NOISE - 测距仪融合的测量噪声
# 测试
测试测距仪最简单的方法是改变距离并与 PX4 检测到的值进行比较 以下部分显示了一些获取测量范围的方法。
# QGroundControl MAVLink 检查器
The QGroundControl MAVLink Inspector lets you view messages sent from the vehicle, including DISTANCE_SENSOR information from the rangefinder. The main difference between the tools is that the Analyze tool can plot values in a graph.
注解
发送的消息取决于车辆配置。 DISTANCE_SENSOR只有在联网车辆安装了测距仪并发布传感器值时,您才会收到消息。
查看测距仪输出:
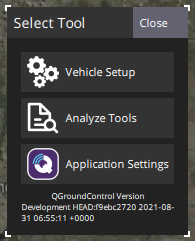
Open the menu Q > Select Tool > Analyze Tools:
选择消息
DISTANCE_SENSOR,然后选中plot复选框current_distance。 工具将会绘制结果: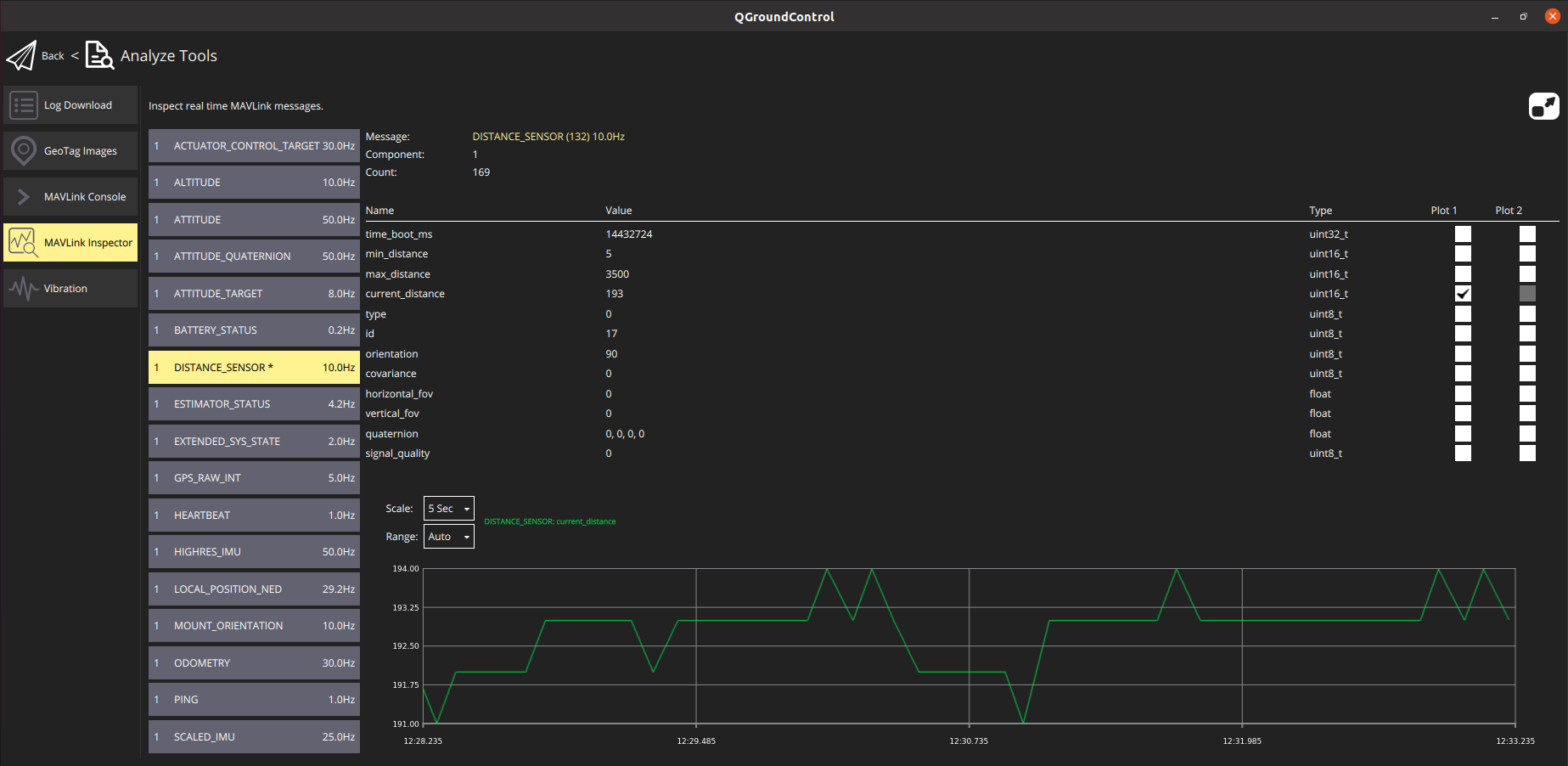
# QGroundControl MAVLink 控制台
You can also use the QGroundControl MAVLink Console to observe the distance_sensor uORB topic:
listener distance_sensor 5
注解
The QGroundControl MAVLink Console works when connected to Pixhawk or other NuttX targets, but not the Simulator. 在模拟器上可以直接在终端中运行命令。
For more information see: Development > Debugging/Logging > Sensor/Topic Debugging using the Listener Command.
# 仿真
激光测距和声纳测距仪可以在Gazebo Simulator上使用。 要做到这一点,你必须在启动模拟器时使用一个拥有测距仪的机体模型。
iris 光流模型包括激光雷达测距仪:
make px4_sitl gazebo_iris_opt_flow
typhoon_h480 包括一个声纳测距仪:
make px4_sitl gazebo_typhoon_h480
如果你需要使用一个不同的车辆,你可以在它的配置文件中包含此模型。 你可以看到如何在相应的 Iris 和 Typhoon 配置文件:
- iris_opt_flow.sdf (opens new window)
<include> <uri>model://lidar</uri> <pose>-0.12 0 0 0 3.1415 0</pose> </include> <joint name="lidar_joint" type="revolute"> <child>lidar::link</child> <parent>iris::base_link</parent> <axis> <xyz>0 0 1</xyz> <limit> <upper>0</upper> <lower>0</lower> </limit> </axis> </joint> - typhoon_h480.sdf (opens new window)
<include> <uri>model://sonar</uri> </include> <joint name="sonar_joint" type="revolute"> <child>sonar_model::link</child> <parent>typhoon_h480::base_link</parent> <axis> <xyz>0 0 1</xyz> <limit> <upper>0</upper> <lower>0</lower> </limit> </axis> </joint>