# 地理围栏
围栏是一个虚拟边界,用于定义机体可以在哪些地方行驶。 围栏可用于防止机体飞出遥控器的范围,或进入不安全或受限制的空域。
PX4提供了两个独立的机制来指定围栏:
- 一个是基本的“故障保护”地理围栏,定义了一个简单的圆柱体。
- 可以使用围栏规划(QGroundControl)定义更复杂的几何图形。
地理围栏适用于所有模式,包括任务和手动飞行。 :::
# 故障保护地理围栏
故障保护围栏定义了一个圆心在home点的圆柱,它具有指定的最大半径和高度。
设置中还包括越界时的故障保护动作。 可能只是一个警告通知,但更常见的是机体会立即返回一个安全位置。
For more information see: Safety > GeoFence Failsafe.
# 地理围栏规划
PX4 支持由多个圆形和多边形区域组成的复杂地理围栏边界,这些区域可以定义为包含(禁出)或排除(禁入)区域。
围栏被放置在QGroundControl与任务和集结并列。
GeoFence planning is fully documented in Plan View > GeoFence (opens new window) (QGroundControl User Guide).
总结:
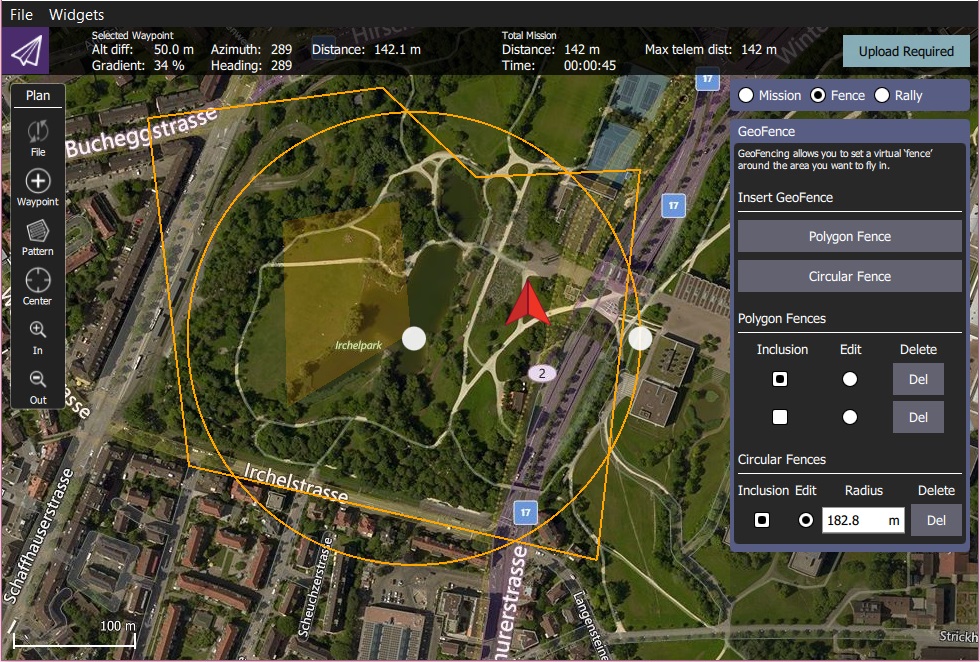
- Open QGroundControl > Plan View.
- 选择 规划类型 单选按钮: 围栏。 这将显示 地理围栏编辑器。
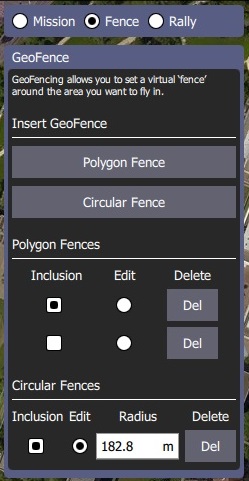
- 选择多边形围栏或圆形围栏按钮,可将添加所需基本类型的围栏到地图中。 这也在编辑器中增加了此类围栏的条目。
- 在地图上调整围栏的形状和位置。
- 围栏中心的圆点可以用来调整围栏的位置。
- 边界上的圆点可以用来调整半径。
- 角(顶点)上的圆点可以用来改变多边形的形状。 点击线段中间可以在两个顶点中添加新的顶点。
- 围栏编辑器可以设置围栏是包含还是排除,还可以通过(编辑单选按钮)选择一个围栏来编辑或者通过(删除按钮)来删除。
- 可添加任意数量的围栏
- 完成后,点击(右上角) 上传 按钮向车辆发送围栏(连同集结和任务)。
- 在围栏故障保护中设置越界动作。
PX4 实现了 MAVLink [微服务](https://mavlink.io/en/services/mission.html), 其中包括支持围栏.