# Offboard控制
Offboard控制背后的想法是能够使用在自动驾驶仪外运行的软件来控制 PX4 飞控。 这是通过 Mavlink 协议完成的, 特别是 SET_POSITION_TARGET_LOCAL_NED (opens new window) 和 SET_ATTITUDE_TARGET (opens new window) 消息。 :::
Offboard控制背后的想法是能够使用在自动驾驶仪外运行的软件来控制 PX4 飞控。 这是通过 Mavlink 协议完成的, 特别是 SET_POSITION_TARGET_LOCAL_NED (opens new window) 和 SET_ATTITUDE_TARGET (opens new window) 消息。
# Offboard控制固件设置
在进行Offboard开发前,您需要在固件端做两个设置。
# 1. 将遥控开关映射到离板模式激活
要做到这一点, 在 QGroundControl 中加载参数,将RC_MAP_OFFB_SW 参数设置为您用来激活Offboard模式的RC 通道 。 该方法会在脱离Offboard模式后进入位置控制模式。
虽然此步骤不是强制性的,因为您可以使用 Mavlink 消息激活Offboard模式。 我们认为这种方法安全多了。
# 2. 启用机载计算机接口
在连接任务计算机的串口上启动MAVLink (参见 任务计算机)。
# 硬件安装
通常,有三种方式设置Offboard模式通信。
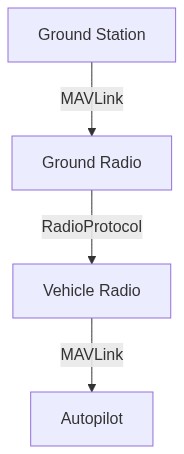
# 串口电台
一端连接飞控的 UART
一端连接地面站电脑
参考电台包括:
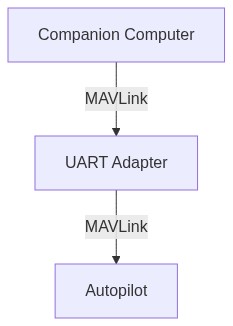
# 板载处理器
在飞行器上部署一台小型将计算机,用 UART 转 USB 适配器连接飞控。 这里有许多可能性,这将取决于您除了向自驾仪发送指令外,还想要做什么样的额外机载处理。
低性能计算机:
高性能计算机:
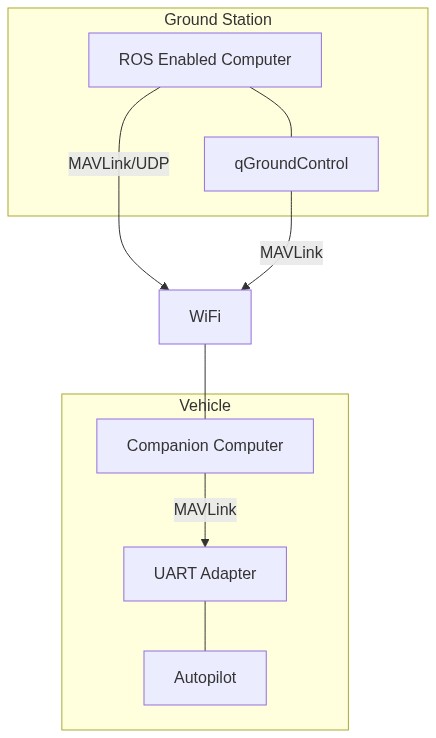
# 板载处理器和 WIFI 链接到 ROS(推荐)
部署在飞行器上的小型计算机除了通过 UART - USB 适配器连接到自动驾驶仪外,同时还可通过WiFi连接至运行 ROS 的地面站。 这可以是上述配备了WiFi适配器的任一计算机。
← 维护 ROS 2 用户指南 →