# 로깅
The system logger is able to log any ORB topic with all included fields. 필요한 모든 것은 .msg 파일에서 생성되므로, 주제 이름만 지정하면 됩니다. 선택적 간격 매개변수는 특정 주제의 최대 로깅 속도를 지정합니다. 주제의 모든 기존 인스턴스가 기록됩니다.
출력 로그 형식은 ULog 입니다.
# 사용법
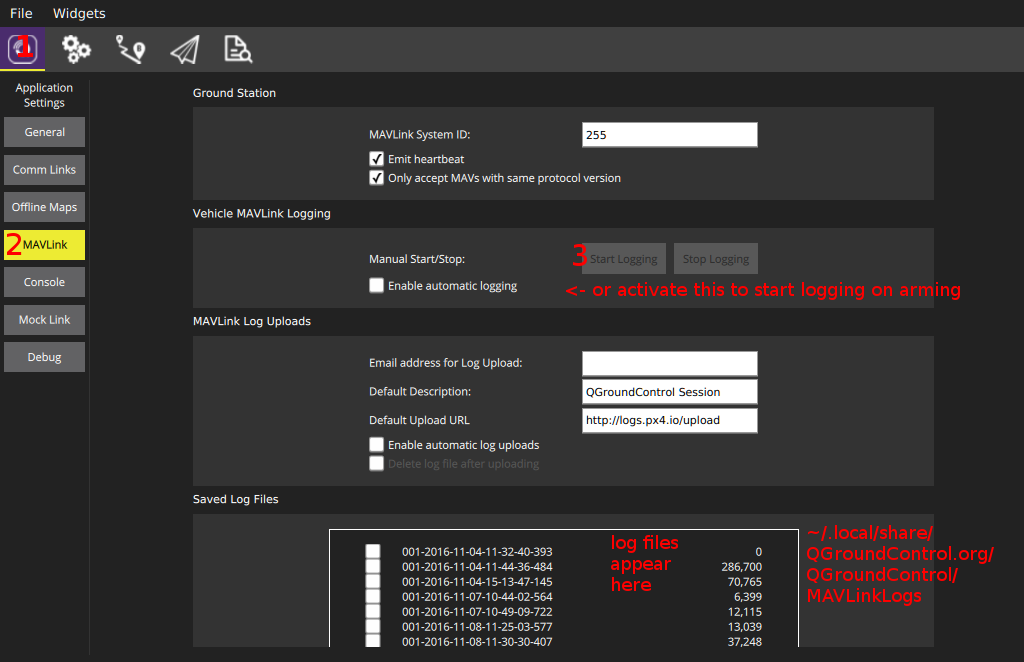
기본적으로, 로깅은 시동을 걸었을 때 시작하며, 제동 후 중지합니다. 새 로그 파일은 시동을 걸 때마다 SD 카드에 생성됩니다. 현재 상태를 표시하려면 콘솔에서 logger status명령을 사용하십시오. 로깅을 바로 시작하고 싶다면 logger on 명령을 내리십시오. 이 명령은 시동을 걸었을 때, 시동 동작보다 우선합니다. logger off 명령은 그 반대입니다.
사용법
logger help
을 활용하면 모든 지원 로거 명령과 매개변수 목록을 확인할 수 있습니다.
# 구성
로깅 시스템은 기본적으로 비행 검토 (opens new window)에 사용할 로그를 수집합니다.
로깅은 SD 로깅 매개변수를 사용하여 설정할 수 있습니다. 변경할 가능성이 높은 매개변수가 아래에 설명되어 있습니다.
| 매개 변수 | 설명 |
|---|---|
| SDLOG_MODE | 로깅 모드는 로깅 시작 및 중지 시간을 정의합니다. - 0: 무장 해제 시까지 기록(기본값).- 1: 부팅에서 다음까지 기록 disarm.- 2: 부팅에서 종료될 때까지 기록합니다. |
| SDLOG_PROFILE | 로깅 프로파일. 자주 사용되지 않는 로깅/분석을 활성화하려면 이것을 사용하십시오(예: EKF2 재생, PID 및 필터 튜닝을 위한 고속 로깅, 열 온도 보정). |
| SDLOG_MISSION | 아주 작은 추가 "미션 로그"를 만듭니다. 이 로그는 비행 검토와 함께 사용할 수 없지만, 위치 태그 지정 또는 규정 준수를 위해 작은 로그가 필요할 때 유용합니다. |
Note
개발자는 로거 모듈을 통해 기록되는 정보를 추가 설정할 수 있습니다(예: 자신의 주제를 기록하려는 경우 이 모듈을 사용). 자세한 내용은 로깅을 참고하십시오. <instance>를 지정하려면, <interval>을 반드시 지정해야합니다.
# 진단SD 카드 설정
Separately, the list of logged topics can also be customized with a file on the SD card. 주제 목록이 있는 카드에 etc/logging/logger_topics.txt 파일을 생성합니다(SITL의 경우 `build/px4_sitl_default/tmp/rootfs/fs/microsd/etc/logging/logger_topics).
` <interval>은 선택 사항이며, 지정된 경우 이 항목에 대해 기록된 두 메시지 사이의 최소 시간 간격(ms)을 정의합니다. 지정하지 않으면, 주제가 최대 속도로 기록됩니다.
<instance>은 선택 사항이며, 지정된 경우 기록할 인스턴스를 정의합니다. 지정하지 않으면, 토픽의 모든 인스턴스를 로깅합니다. <instance>를 지정하려면, <interval>을 반드시 지정하여야합니다. 0 값을 설정하면 최대 기록율로 지정할 수 있습니다.
이 파일의 주제는 기본적으로 기록된 모든 주제를 대체합니다.
예 :
sensor_accel 0 0
sensor_accel 100 1
sensor_gyro 200
sensor_mag 200 1
이 구성은 최대 속도에서 sensor_accel 0, 10Hz에서 sensor_accel 1, 5Hz에서 모든 sensor_gyro 인스턴스 및 5Hz에서 sensor_mag 1을 기록합니다.
# 스크립트
pyulog (opens new window) 저장소에 로깅 파일을 분석하고 변환하는 여러 스크립트가 있습니다.
# 손실
로깅 드롭아웃은 바람직하지 않으며, 드롭아웃의 양에 영향을 미치는 몇 가지 요소가 있습니다.
- 테스트한 대부분의 SD 카드는 분당 여러 번 일시 중지되었습니다. 이는 기록 명령을 처리함에 있어 수 100ms 정도의 지연이 있음을 보여줍니다. 이런 현상으로 인해 그동안 기록 버퍼가 차면 손실을 유발합니다. (아래와 같이) SD 카드에 따라 영향을 받습니다.
- SD 카드를 포맷하면, 손실을 어느정도 예방할 수 있습니다.
- 로그 버퍼 크기를 늘리면 도움이 됩니다.
- 선택한 토픽에 대한 로깅 율을 줄이거나 필요없는 토픽을 로깅 목록에서 제거하십시오(
info.py가 이 문제 해결에 도움됨).
# SD 카드
다음은 다양한 SD 카드에 대한 성능 테스트 결과입니다. 테스트는 Pixracer에서 수행되었습니다. 결과는 Pixhawk에도 적용됩니다.
Note
NuttX에 지원되는 최대 SD 카드 크기는 32GB(SD 메모리 카드 사양 버전 2.0)입니다.
| SD 카드 | 평균 시퀀스 기록 속도 [KB/s] | 최대 기록 시간 / 블록 (평균) [ms] |
|---|---|---|
| SanDisk Extreme U3 32GB | 461 | 15 |
| Sandisk Ultra Class 10 8GB | 348 | 40 |
| Sandisk Class 4 8GB | 212 | 60 |
| SanDisk Class 10 32 GB (High Endurance Video Monitoring Card) | 331 | 220 |
| Lexar U1 (Class 10), 16GB High-Performance | 209 | 150 |
| Sandisk Ultra PLUS Class 10 16GB | 196 | 500 |
| Sandisk Pixtor Class 10 16GB | 334 | 250 |
| Sandisk Extreme PLUS Class 10 32GB | 332 | 150 |
평균 쓰기 속도보다 더 중요한 것은 블록당 최대 쓰기 시간(4KB)입니다. 이것은 최소 버퍼 크기를 정의합니다. 이 최대값이 클수록 드롭아웃을 피하기 위하여 더 큰 로그 버퍼가 필요합니다. 기본 항목의 로깅 대역폭은 약 50KB/s로 모든 SD 카드가 충족합니다.
지금까지 우리가 알고 있는 최고의 SD 카드는 SanDisk Extreme U3 32GB입니다. 이 카드는 쓰기 시간 스파이크를 나타내지 않으므로(따라서 드롭아웃이 거의 없음) 권장됩니다. 다른 카드 크기도 똑같이 잘 작동할 수 있지만, 일반적으로 성능은 차이가 납니다.
sd_bench -r 50으로 자신의 SD 카드를 테스트하고, 결과를 https://github.com/PX4/PX4-Autopilot/issues/4634에 보고할 수 있습니다.
# 로그 스트리밍
로깅을 수행하는 전통적인 완벽한 방법은 FMU에서 SD 카드를 사용하는 것입니다. 그러나, MAVLink를 통하여 동일한 로깅 데이터를 보내는 대체 로그 스트리밍이 있습니다. 이 방법은 예를 들어 FMU에 SD 카드 슬롯이 없는 경우(예: Intel® Aero Ready to Fly Drone) 또는 단순히 SD 카드를 처리할 필요가 없는 경우에 사용할 수 있습니다. 두 방법 모두 독립적으로 동시에 사용할 수 있습니다.
요구 사항은 최소 ~50KB/s 네트웍 속도입니다(예: WiFi 링크). 그리고, 한 클라이언트만 동시에 로그 스트리밍을 요청할 수 있습니다. 연결이 안정적일 필요는 없으며, 프로토콜은 드롭을 처리하도록 설계되었습니다.
ulog 스트리밍을 지원하는 다양한 클라이언트가 있습니다.
- PX4-Autopilot/Tools의
mavlink_ulog_streaming.py스크립트 - QGroundControl
- MAVGCL (opens new window)
# 진단
- 로그 실시간 전송을 시작하지 않았다면,
logger를 실행 중인지(위 참고) 확인하고, 시작하는 동안 콘솔 출력을 살펴보십시오. - 그래도 작동하지 않으면, MAVLink 2를 사용하고 있는지 확인하십시오.
MAV_PROTO_VER매개변수 값을 2로 강제 설정하십시오. - 로그 스트리밍은 구성된 MAVLink 속도(
-r매개변수)의 최대 70%를 사용합니다. 더 큰 전송율이 요구되는 상황에서는, 메세지가 사라집니다. 현재 사용된 백분율은mavlink 상태로 검사할 수 있습니다(이 예에서는 1.8%가 사용됨).또한instance #0: GCS heartbeat: 160955 us ago mavlink chan: #0 type: GENERIC LINK OR RADIO flow control: OFF rates: tx: 95.781 kB/s txerr: 0.000 kB/s rx: 0.021 kB/s rate mult: 1.000 ULog rate: 1.8% of max 70.0% accepting commands: YES MAVLink version: 2 transport protocol: UDP (14556)txerr값이 0에 머물러있는지 확인하십시오. 만약 이 값이 올라간다면, NuttX 전송 버퍼가 너무 작거나, 물리 링크 대역폭이 포화 상태이거나, 하드웨어가 데이터를 처리하기에 너무 느린 상황을 의미합니다.
← 이진 크기 프로파일링 비행 로그 분석 →