# 日志记录
The system logger is able to log any ORB topic with all included fields. Everything necessary is generated from the .msg file, so that only the topic name needs to be specified. An optional interval parameter specifies the maximum logging rate of a certain topic. 所有主题的实例将会被记录。
输出的日志格式是 Ulog。
# 用法
By default, logging is automatically started when arming, and stopped when disarming. 每次解锁后的飞行对话将会在 SD 卡上生成一个新的日志文件。 To display the current state, use logger status on the console. If you want to start logging immediately, use logger on. This overrides the arming state, as if the system was armed. log off 取消日志记录。
使用
logger help
列举所有支持的日志命令和参数。
# 配置
The logging system is configured by default to collect sensible logs for use with Flight Review (opens new window).
The <interval> is optional, and if specified, defines the minimum interval in ms between two logged messages of this topic. If not specified, the topic is logged at full rate. The parameters you are most likely to change are listed below.
| SD 卡 | Description |
|---|---|
| SDLOG_MODE | 461 |
| SDLOG_PROFILE | Logging profile. Use this to enable less common logging/analysis (e.g. for EKF2 replay, high rate logging for PID & filter tuning, thermal temperature calibration). |
| SDLOG_MISSION | 212 |
注解
Developers can further configure what information is logged via the logger module (you would use this, for example, if you want to log your own topics). For more information see: Logging.
# 诊断
Separately, the list of logged topics can also be customized with a file on the SD card. Create a file etc/logging/logger_topics.txt on the card with a list of topics (For SITL, it's build/px4_sitl_default/tmp/rootfs/fs/microsd/etc/logging/logger_topics.txt):
<topic_name>, <interval>
The <interval> is optional, and if specified, defines the minimum interval in ms between two logged messages of this topic. If not specified, the topic is logged at full rate.
The <instance> is optional, and if specified, defines the instance to log. If not specified, all instances of the topic are logged. To specify <instance>, <interval> must be specified. It can be set to 0 to log at full rate
The topics in this file replace all of the default logged topics.
By far the best card we know so far is the SanDisk Extreme U3 32GB. This card is recommended, because it does not exhibit write time spikes (and thus virtually no dropouts). Different card sizes might work equally well, but the performance is usually different.
sensor_accel 0 0
sensor_accel 100 1
sensor_gyro 200
sensor_mag 200 1
This configuration will log sensor_accel 0 at full rate, sensor_accel 1 at 10Hz, all sensor_gyro instances at 5Hz and sensor_mag 1 at 5Hz.
# 脚本
There are several scripts to analyze and convert logging files in the pyulog (opens new window) repository.
# 丢帧
Logging dropouts are undesired and there are a few factors that influence the amount of dropouts:
- Most SD cards we tested exhibit multiple pauses per minute. This shows itself as a several 100 ms delay during a write command. It causes a dropout if the write buffer fills up during this time. This effect depends on the SD card (see below). This shows itself as a several 100 ms delay during a write command. It causes a dropout if the write buffer fills up during this time. This effect depends on the SD card (see below).
- 格式化 SD 卡有助于避免丢帧。
- 增大日志缓存也有效。
- Decrease the logging rate of selected topics or remove unneeded topics from being logged (
info.py <file>is useful for this).
# SD 卡
The following provides performance results for different SD cards. Tests were done on a Pixracer; the results are applicable to Pixhawk as well.
注解
The maximum supported SD card size for NuttX is 32GB (SD Memory Card Specifications Version 2.0).
| SD Card | Mean Seq. Write Speed [KB/s] | Max Write Time / Block (average) [ms] |
|---|---|---|
| SanDisk Extreme U3 32GB | 461 | 15 |
| Sandisk Ultra Class 10 8GB | 348 | 40 |
| Sandisk Class 4 8GB | 212 | 60 |
| SanDisk Class 10 32 GB (High Endurance Video Monitoring Card) | 331 | 220 |
| Lexar U1 (Class 10), 16GB High-Performance | 209 | 150 |
| Sandisk Ultra PLUS Class 10 16GB | 196 | 500 |
| Sandisk Pixtor Class 10 16GB | 334 | 250 |
| Sandisk Extreme PLUS Class 10 32GB | 332 | 150 |
The requirement is that the link provides at least ~50KB/s, so for example a WiFi link. And only one client can request log streaming at the same time. The connection does not need to be reliable, the protocol is designed to handle drops. 并且同一时刻只能有一个客户机可以请求日志流。 Logging bandwidth with the default topics is around 50 KB/s, which all of the SD cards satisfy.
By far the best card we know so far is the SanDisk Extreme U3 32GB. This card is recommended, because it does not exhibit write time spikes (and thus virtually no dropouts). Different card sizes might work equally well, but the performance is usually different.
You can test your own SD card with sd_bench -r 50, and report the results to https://github.com/PX4/PX4-Autopilot/issues/4634.
# 日志流
The traditional and still fully supported way to do logging is using an SD card on the FMU. However there is an alternative, log streaming, which sends the same logging data via MAVLink. This method can be used for example in cases where the FMU does not have an SD card slot (e.g. Intel® Aero Ready to Fly Drone) or simply to avoid having to deal with SD cards. Both methods can be used independently and at the same time.
The requirement is that the link provides at least ~50KB/s, so for example a WiFi link. And only one client can request log streaming at the same time. The connection does not need to be reliable, the protocol is designed to handle drops.
There are different clients that support ulog streaming:
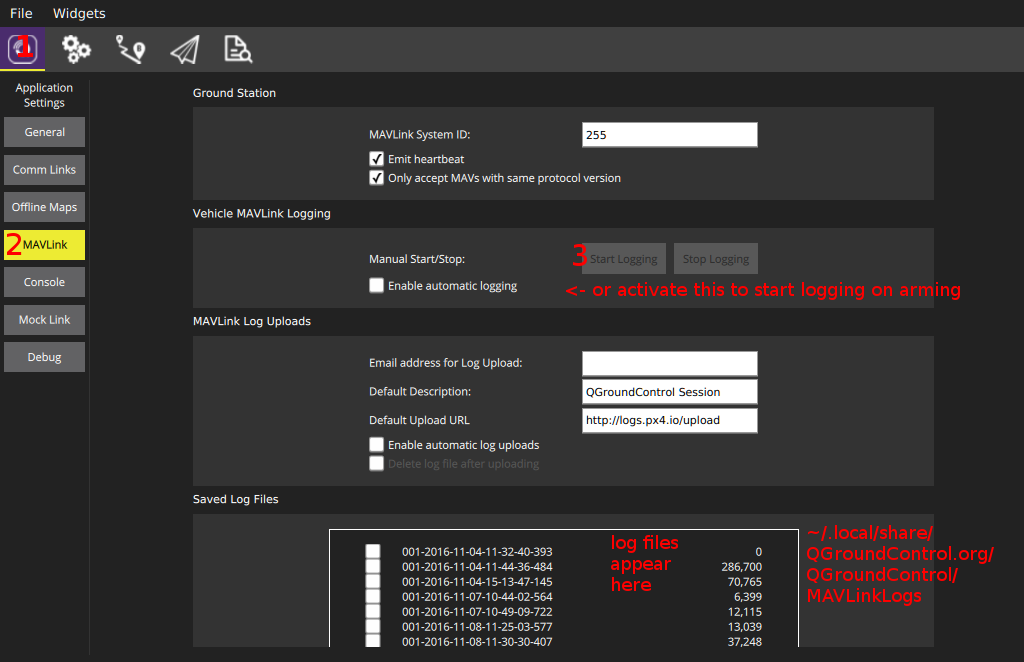
mavlink_ulog_streaming.pyscript in Firmware/Tools.- QGroundControl:
- MAVGCL (opens new window)
# Diagnostics
- If log streaming does not start, make sure the
loggeris running (see above), and inspect the console output while starting. - If it still does not work, make sure that Mavlink 2 is used. Enforce it by setting
MAV_PROTO_VERto 2. Enforce it by settingMAV_PROTO_VERto 2. - Log streaming uses a maximum of 70% of the configured mavlink rate (
-rparameter). If more is needed, messages are dropped. The currently used percentage can be inspected withmavlink status(1.8% is used in this example): 如果需要更大的速率,数据会丢失。 The currently used percentage can be inspected withmavlink status(1.8% is used in this example):同时确保instance #0: GCS heartbeat: 160955 us ago mavlink chan: #0 type: GENERIC LINK OR RADIO flow control: OFF rates: tx: 95.781 kB/s txerr: 0.000 kB/s rx: 0.021 kB/s rate mult: 1.000 ULog rate: 1.8% of max 70.0% accepting commands: YES MAVLink version: 2 transport protocol: UDP (14556)txerr一直是 0。 Also make suretxerrstays at 0. If this goes up, either the NuttX sending buffer is too small, the physical link is saturated or the hardware is too slow to handle the data.