# 기체 선정
PX4는 항공, 지상, 수상 및 수중 차량등에 사용할 수 있습니다. PX4와 호환되는 차량 프레임의 전체 목록은 기체 정의서를 참고하십시오.
아래를 참고하여 목적에 적합한 기체를 선택하십시오.
- Multicopters offer precision hovering and vertical takeoff, at the cost of shorter and generally slower flight. PX4는 드론 비행에 널리 사용되는 편리한 비행 모드들을 제공합니다.
- 고정익은 전방 장거리 고속 비행용에 적합하며, 항공 감시 등의 목적으로 사용됩니다. 멀티콥터보다 이착륙이 어렵고 호버링이나 저속 비행(예 : 수직 구조물 조사 등)등 에는 적합하지 않는 단점이 있습니다.
- VTOL(수직 이착륙기)은 틸트로터, 테일 시터, 쿼드 플레인 등의 다양한 기체 유형들이 있습니다. 멀티콥터의 수직 이착륙 및 호버링의 장점과 고정익의 전방 고속 비행의 장점을 모두 가지고 있습니다. 멀티콥터와 고정익보다 비싸고 제작과 튜닝이 어려운 단점이 있습니다.
- 비행선과 풍선은 비행 속도와 방향 제어가 극히 제한되며, 저비용 고고도 장기 비행에 적합한 공기보다 가벼운 기체입니다.
- 로버는 자동차와 같은 지상용 차량입니다. 제어와 사용이 용이합니다.
- 보트는 수상 차량입니다.
- 잠수정은 수중 차량입니다.
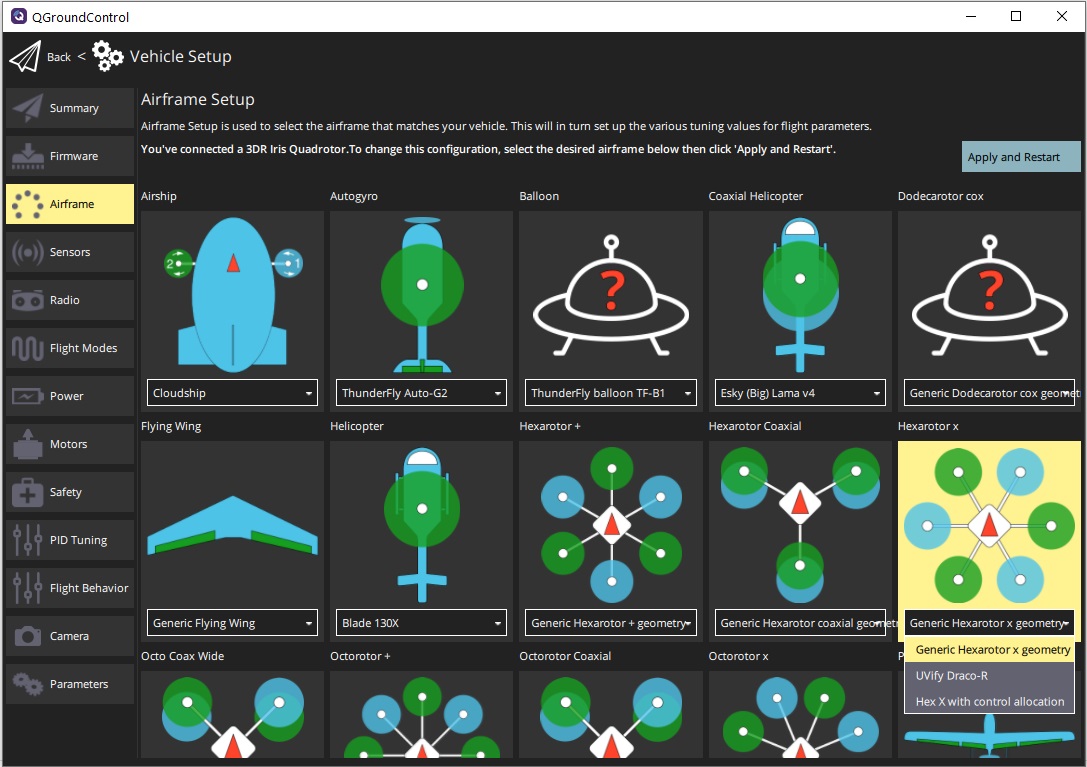
PX4의 초기 [기체 설정](../config/airframe.md)은 *QGroundControl*을 사용합니다.
 :::
:::