# 기본 개념
무인 항공기의 기본 개념과 PX4 사용법에 대하여 설명합니다. 초보자뿐만 아니라 전문가에게도 유익한 자료들이 많이 있습니다.
기본 개념에 익숙하시면, 기본 조립편에서 자동비행장치의 배선 방법을 공부할 수 있습니다. QGroundControl를 이용한 펌웨어 설치 방법은 기본 설정편을 참고하십시오.
# 드론의 정의
드론은 원격 또는 자동으로 조종할 수 있는 무인로봇 차량입니다.
드론은 개인, 산업체, 공공기관 및 국방 분야 (opens new window)등의 다양한 분야에서 사용되고 있습니다. 또한, 항공 사진, 화물 운송, 경주, 수색 및 탐사 등의 분야에서 사용됩니다.
TIP
항공용, 지상용, 해양 및 수중 드론이 있습니다. 드론의 공식 용어에는 UAV(Unmanned Aerial Vehicles), UAS(Unmanned Aerial Systems, UGV(Unmanned Ground Vehicles), USV(Unmanned Surface Vehicles)와 UUV(Unmanned Underwater Vehicles) 등이 있습니다.
자동비행장치(오토파일럿)는 드론의 두뇌에 해당하는 장치입니다. It consists of flight stack software running on vehicle controller ("flight controller") hardware.
# PX4 자동비행장치
PX4 (opens new window)는 오픈 소스 기반의 강력한 자동조종장치입니다.
PX4의 주요 특징은 아래와 같습니다.
- 항공기(멀티콥터, 고정익 및 수직이착륙기), 지상운송체, 잠수정 등 다양한 차량들을 제어합니다.
- 차량 콘트롤러, 센서 및 다양한 주변 장치에 적합한 매우 탁월한 선택입니다.
- 유연하고 강력한 비행 모드와 안전 기능을 지원합니다.
PX4는 QGroundControl 지상국, 픽스호크 하드웨어 (opens new window), 보조 컴퓨터, 카메라, MAVLink 프로토콜 지원 하드웨어를 통합하는 MAVSDK (opens new window)를 포함하는 방대한 드론 플랫폼의 핵심입니다. PX4는 드론코드 프로젝트 (opens new window)의 지원을 받고 있습니다.
# QGroundControl
드론코드에서 지원하는 지상제어 S/W는 QGroundControl (opens new window)입니다. QGroundControl을 사용하여 비행 콘트롤러에 PX4 업로드, 기체 설정, 여러가지 매개변수 설정, 실시간 비행 정보 조회 및 완전 자동 임무 비행 등의 작업이 가능합니다.
QGroundControl은 윈도우, 안드로이드, MacOS 및 리눅스 운영체제를 지원합니다. 여기 (opens new window)에서 다운로드하여 설치할 수 있습니다.
# 비행 콘트롤러(보드)
PX4는 초기에는 Pixhawk 시리즈에서만 실행되도록 설계되었으나, 지금은 리눅스 뿐만 아니라 다양한 하드웨어에서도 실행됩니다. 차량의 물리적 조건, 운용 목적과 비용을 고려하여 적절한 보드를 선택할 수 있습니다.
자세한 내용은 비행 콘트롤러 선택을 참고하십시오.
# 센서
PX4는 기체의 상태 측정하기 위하여 센서를 사용합니다. 이는 자율비행 기체 안정화에 필수 과정입니다. 각속도 센서, 가속도 센서, 지자기 센서(나침반)와 기압 센서는 시스템 구동을 위한 최소 요구 사항입니다. 자동 모드와 기타 모드를 사용하기 위해서는 GPS와 같은 위치측정시스템이 필요합니다. 고정익과 수직이착륙기에는 대기속도 센서가 필수입니다.
더 자세한 정보는 다음을 참고하십시오.
# 출력 장치: 모터, 서보, 액츄에이터
PX4는 모터 속도(예 : ESC를 통하여), 에일러론과 플랩 같은 비행 표면, 카메라 트리거, 낙하산, 그리퍼 및 기타 적재 장비 등을 출력을 통하여 제어합니다.
출력 포트는 PWM 포트를 이거나, UAVCAN 노드에 연결할 수 있습니다(예: UAVCAN 모터 제어 장치). 노드에 대한 동일한 출력 기체 매핑이 두 경우 모두에서 사용됩니다.
아래 그림은 Pixhawk 4와 Pixhawk 4 미니의 PWM 출력 포트를 설명합니다.
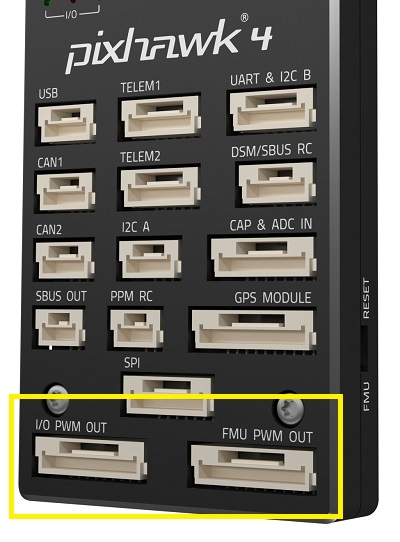

출력 장치는 크게 MAIN 포트와 AUX 포트로 나누며, 포트는 번호로 구분됩니다. MAINn과 AUXn의 n에는 1 ~ 6 또는 1 ~ 8까지의 번호가 부여됩니다.
TIP
각 출력장치에는 기체별로 고유한 기능을 부여됩니다. 기체의 출력 매핑은 기체 정의서를 참고하십시오.
WARNING
어떤 비행 콘트롤러에는 MAIN PWM 출력 장치만 있거나(예: Pixhawk 4 미니), 6개의 MAIN 또는 AUX 출력 장치만 있을 수 있습니다. 비행 콘트롤러에는 선택한 기체에 필요할 출력 포트가 있는 지 확인하십시오.
보틍, MAIN 포트는 비행 제어용이며, AUX 포트는 액츄에이터나 적재 장비들을 제어합니다. 때로는, 수직 이착륙기처럼 MAIN 포트가 부족할 경우에는 AUX 포트를 비행 제어용으로 사용하기도 합니다. 예를 들어, 일반 쿼드콥터에서는 MAIN 포트 1 ~ 4을 모터 제어용으로 사용하며, 나머지 MAIN 포트와 AUX 포트를 RC 제어용으로 사용합니다.
비행 콘트롤러의 실제 출력용 포트와 버스는 하드웨어와 PX4 설정에 따라 달라집니다. 일반적으로 PWM 출력 포트는 위에서 설명한 대로 사용되며, 보틍은 MAIN OUT 또는 AUX OUT으로 표시되어 있습니다.
FMU PWM OUT, IO PWM Out 방식이나 이와 유사한 방식으로 표시합니다. 픽스호크 콘트롤러에는 주 FMU 보드가 있고, 별도의 입출력용 보드를 연결할 수도 있습니다. 별도의 입출력 보드가 있을 경우에는, AUX 포트는 FMU 보드에 연결하고, MAIN 포트는 입출력 보드에 연결합니다. 다른 경우로는 MAIN 포트를 FMU 보드에 연결하고, AUX 포트가 없을 수도 있습니다. FMU 출력 포트는 PWM 처럼 짧은 지연 시간이 요구되는 D-shot, One-shot 프로토콜에 사용됩니다. FMU 출력 포트는 레이싱 드론처럼 높은 성능이 요구되는 기체에 사용됩니다.
참고:
MAIN포트와AUX포트에는 PWM/Dshot/OneShot 출력 제어에 충분한 6개에서 8개의 출력 포트를 가지고 있습니다. 이론적으로는, 보드 버스에서 더 많은 출력 포트를 제공할 수 있습니다. UAVCAN 버스에는 이러한 제한이 없습니다.
# 전기변속기(ESC)와 모터
대부분의 PX4 드론은 비행 전기변속기(ESC)로 브러시리스 모터를 제어합니다. 전기변속기는 제어 장치 신호를 모터의 전력으로 변환합니다.
PX4가 지원하는 전기변속기와 모터 정보는 여기를 참고하십시오.
- 전기변속기와 모터
- 전기변속기 보정
- 전기변속기 펌웨어와 프로토콜 개요 (opens new window)(oscarliang.com)
# 배터리와 전원
PX4 드론은 리튬-폴리머(LiPo) 배터리를 가장 많이 사용합니다. 일반적으로, 배터리는 비행 콘트롤러와 전기변속기(모터용)에 전원을 제공하는 전원 모듈이나 전원 관리 보드를 통하여 시스템에 연결됩니다.
배터리와 배터리 설정 정보는 배터리 설정과 기본 조립(예: 픽스호크 4 배선 빠른 시작 > 전원)를 참고하십시오.
# 무선 조종(RC)
무선 조종기(RC)를 사용하여 기체를 수동 제어할 수 있습니다. 송신기(무선 조종기에 장착)와 수신기(기체에 장착)로 구성됩니다. 일부 RC에서는 자동조종장치에서 전송한 텔레메트리를 수신할 수 있습니다.
Note
PX4는 자율비행 모드에서 RC가 필수 사항은 아닙니다.

RC 선택 방법은 RC 선택을 참고하십시오. 다음과 같은 관련 주제들을 설명합니다.
- 무선/RC 설정 - QGroundControl에서의 RC 설정.
- 비행 첫걸음 - RC 비행 방법을 설명합니다.
- FrSky 텔레메트리 - PX4의 텔레메트리 정보나 상태 정보를 수신을 위한 RC 송신기 설정방법을 설명합니다.
# 지상제어 S/W와 조이스틱
QGroundControl에서 조이스틱을 사용하여 PX4를 수동으로 조종할 수 있습니다. QGroundControl은 조이스틱 신호를 MAVLink 메시지로 변환하여 텔레메트리에 전송합니다. 이와 같은 방식은 Auterion, Skynav (opens new window), UAVComponents와 MicroNav (opens new window)에서 사용합니다. 조이스틱은 기체 시뮬레이션에서 자주 사용됩니다.
# 안전 스위치
기체의 안전 스위치를 킨 다음에 기체에 시동을 걸 수 있습니다. 기체에 시동이 걸리면 모터와 프로펠러가 동작합니다. 보통 안전 스위치는 GPS 장치에 장착되어 있으나, 별도의 부품으로 제공되기도 합니다.
WARNING
시동이 걸린 기체는 안전 사고의 위험성이 항상 존재합니다. 안전 스위치는 예기치 않은 시동으로 인하여 발생할 수 있는 사고를 방치하는 것이 목적입니다.
# 텔레메트리 무선 통신
텔레메트리 무선 통신은 QGroundControl과 같은 지상제어S/W와 PX4 실행 차량을 MAVLink 프로토콜로 연결합니다. 비행중인 기체의 매개변수 변경, 실시간 텔레메트로 통신, 임무 변경 등의 작업을 수행할 수 있습니다.
# 외부 보조 컴퓨터
차량에 장착된 보조 컴퓨터는 직렬 케이블이나 Wi-Fi로 PX4를 제어할 수 있습니다. 일반적으로, 보조 컴퓨터는 MAVSDK나 MAVROS와 같은 MAVLink API로 통신합니다.
Relevant topics include:
# SD 카드 (휴대용 저장 장치)
PX4는 비행 로그를 SD 카드에 저장합니다. UAVCAN 주변 장치를 사용하거나 비행 임무 수행에는 SD 카드가 필수입니다.
기본적으로, PX4는 부팅 과정에 SD 카드가 없으면, 포맷 실패 경고음을 두 번 울립니다. 그리고, 위에서 설명한 다수의 기능들이 작동하지 않습니다.
TIP
픽스호크 보드에서 지원하는 SD 카드의 최대 용량은 32GB입니다.
TIP
픽스호크 보드에서 지원하는 SD 카드의 최대 용량은 32GB입니다.
SD 카드는 선택 사항입니다. SD 카드가 없는 비행 콘트롤어는 다음의 작업들을 수행하여야 합니다.
- CBRK_BUZZER 매개변수로 알림음을 껍니다.
- 스트림 로그를 다른 보조 장치에 기록합니다.
- 비행 임무를 RAM/플래시에 저장합니다.
# 시동 및 해제
기체에 전원을 공급하게 되면, 모터와 프로펠러와 같은 부품들은 안전 사고를 유발할 수 있으므로 항상 주의하여야 합니다.
사고를 줄이기 위해 PX4는 세 가지의 전원 상태를 정의합니다:
- 비시동: 모든 모터와 액추에이터에 전원이 공급되지 않습니다.
- 사전 시동: 모터에 전원이 공급되지 않지만 작동기는 작동하지 않습니다(위험하지 않은 작동기를 벤치 테스트할 수 있음).
- 시동: 모터 및 기타 액추에이터에 전원이 공급되고 프로펠러가 회전할 수 있습니다.
차량은 필요시에만 시동이 걸립니다. 일부 기체에는 시동전에 조작하는 안전 스위치(보통 GPS 수신기의 일부임)가 장착되어 있습니다.
기본적으로:
- 비행중이 아닐 때는 차량의 시동을 해제하거나 전원을 차단하고, 이륙 전에만 시동을 켜는 것이 바람직합니다.
- 기체가 정해진 시간 안에 이륙하지 않으면, 착륙후에는 기체의 시동은 자동으로 해제됩니다. 시동 해제 시간은 매개변수로 설정합니다.
- 차량은 착륙 후 자동으로 무장 해제됩니다(해제 시간은 설정 가능).
- 기체는 정상 상태가 아니면, 시동은 걸리지 않습니다.
- 수직이착륙기는 고정익 모드에서는 시동이 걸리지 않습니다(기본 설정).
- 사전 시동은 모터에 전원이 공급되지 않은 상태로 유지하면서 안전하게 벤치 테스트 액츄에이터를 사용할 수 있습니다.
모드 2 수신기의 경우에는 추진력/방위각 조절 스틱을 우측 하단에 1초 정도 위치하면 시동이 걸립니다. 시동을 해제하려면 좌측 하단으로 둡니다. PX4에서 무선 조종 스위치로 시동을 걸 수 있도록 설정할 수 있습니다. 또한, 지상통제국에서 시동 명령을 MAVLink로 전송할 수 있습니다.
시동 및 해제에 관한 자세한 내용은 시동 준비, 시동, 시동 해제를 참고하십시오.
# 비행 모드
비행 모드는 다양한 유형과 수준의 차량 자동화 기능을 제공합니다. 비행 모드는 다양한 유형과 수준의 차량 자동화 기능을 제공합니다. 예를 들어 이륙, 복귀 및 착륙 등의 작업을 자동으로 제어할 수 있습니다. 또 다른 자율 모드에는 사전 프로그래밍된 임무 수행, GPS 위치 정보 비행, 외부 컴퓨터 또는 지상제어S/W 명령에 의한 비행 작업이 가능합니다.
수동 모드에서는 사용자가 비행 콘트롤러를 RC로 직접 제어합니다. 다른 수동 모드에서는 또 다른 기능의 비행이 가능합니다. 예를 들어, 곡예 비행이나 바람이 불어도 일정환 경로나 위치를 유지하는 비행 등의 작업이 가능합니다.
TIP
모든 기체마다 모든 비행 모드가 적용되지 않습니다. 비행 모드는 조건이 충족된 기체에만 적용할 수 있습니다. 대부분의 모드에서는 GPS 위치 정보가 필요합니다.
비행 모드에 자세한 정보는 비행 모드를 참고하십시오. RC 스위치로 비행 모드를 변경하는 방법은 비행 모드 설정을 참고하십시오.
# 안전 설정(사고 방지)
PX4는 시스템 사고시에 기체을 보호하고 복구할 수 있는 안전 시스템이 있으며, 이와 관련된 여러가지 설정들이 있습니다. 안정 설정으로 안전 비행 지역과 조건을 지정하고, 안전 장치에서 수행하는 작업(예: 착륙, 위치 유지 또는 지정된 지점으로 복귀)을 설정할 수 있습니다.
Note
안전 설정시에 동작은 첫 번째 사고 방지 이벤트에 대해서만 지정가능합니다. 이벤트가 발생하면, 시스템은 특별한 처리 코드를 실행하여 안전 장치 트리거가 분리된 시스템에서 기체별 코드에 의해 관리되도록 합니다.
주요 안전장치는 다음과 같습니다.
- 배터리 부족
- RC(원격 제어) 신호 상실
- 위치 상실(GPS 전역 위치 추정 품질이 너무 낮음)
- 외부 보드 연결 손실(예: 보조 컴퓨터와의 연결이 끊어짐)
- 데이터 링크 손실(예: GCS에 대한 텔레메트리 연결이 끊어짐)
- 지리적 경계 위반(가상 실린더 내부로 기체 비행을 제한합니다)
- 미션 안전장치(재 이륙 시 이전 미션이 실행되는 것을 방지합니다)
- 트래픽 회피(예: ADSB 응답기에 의해 작동됩니다)
더 자세한 내용은 안전편을 참고하십시오.
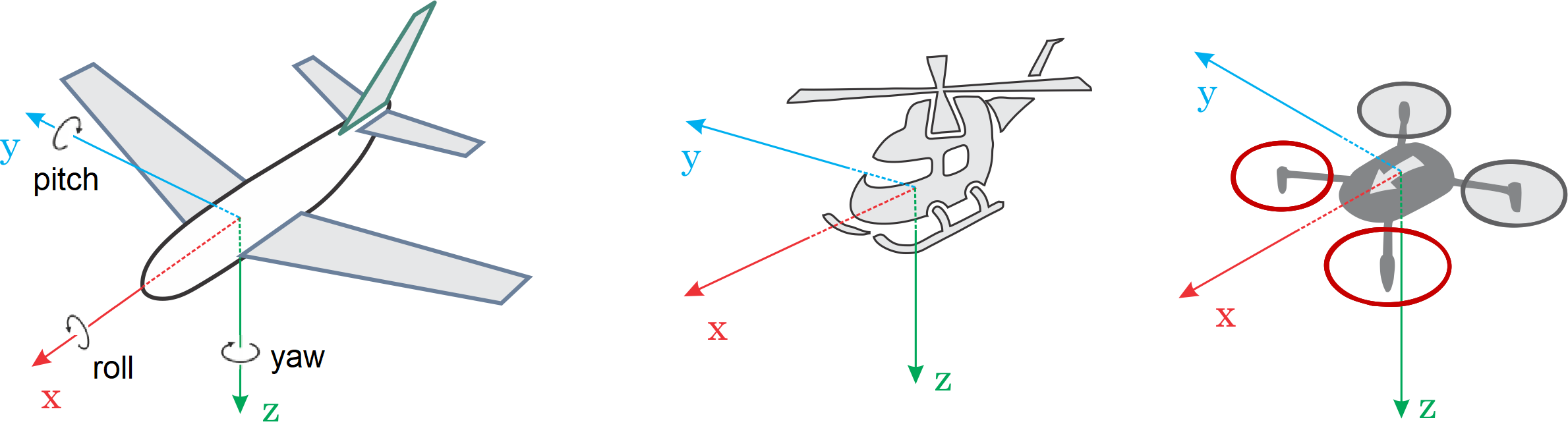
# 전진 방향
차량, 보트 및 항공기에는 전진 방향이 정해져 있습니다.
Note
VTOL 테일 시터의 방향은 멀티콥터 설정(즉, 이륙, 호버링, 착륙 중 차량 포즈)에 의하여 결정됩니다.
차량의 전진 방향을 알아야만 차량의 이동 벡터와 정렬할 수 있습니다. 멀티콥터는 모든 방향에서 대칭인 경우에도 전진 방향이 정의됩니다. 제조사에서는 일반적으로 프로펠러나 팔(프레임)에 색깔을 사용하여 차량의 전진 방향을 표시합니다.
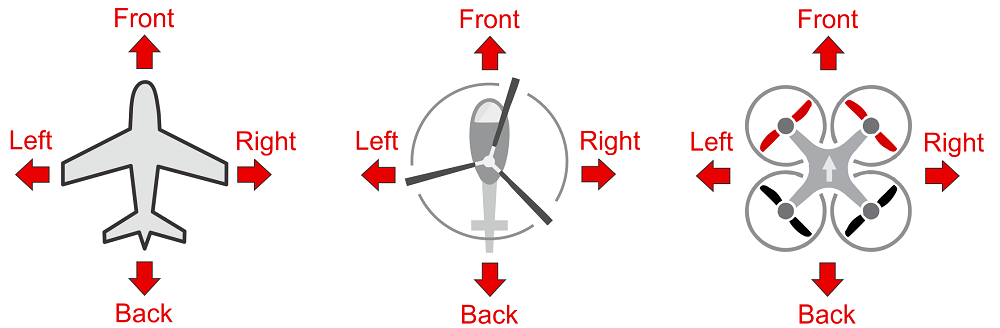
위 그림에서 전진 방향은 멀티콥터의 프로펠러에 빨간색으로 표시되어 있습니다.
비행 콘트롤러 방향에서 전진 방향에 대한 자세한 정보를 참고하십시오.