# 使用侦听器命令进行传感器/主题调试
uORB 是用于进程间通信的异步 publish()/subscribe() 消息传递 API。 listener 命令可从 QGroundControl 的 MAVLink 控制台 中用于检查主题(消息)值,包括传感器发布的当前值。
提示
This is a powerful debugging tool because it can be used even when QGC is connected over a wireless link (e.g. when the vehicle is flying).
注解
The listener command is also available through the System Console and the MAVLink Shell.
提示
To check what topics are available at what rate, just use the uorb top command.
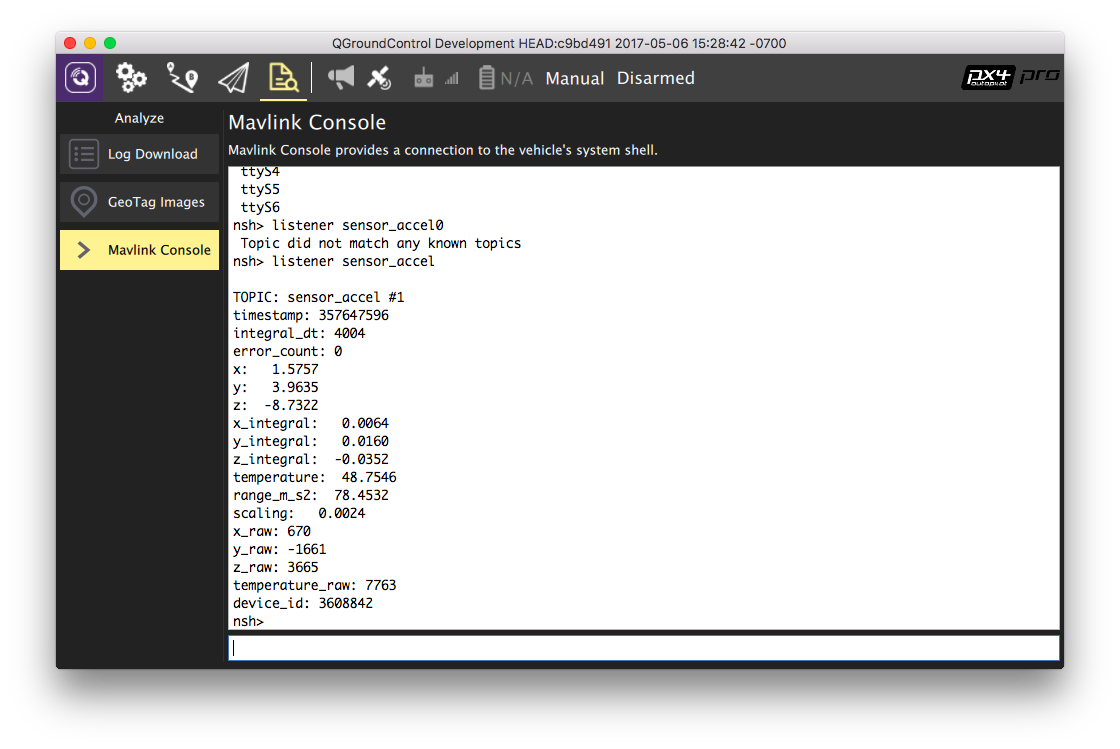
The image below demonstrates QGroundControl being used to get the value of the acceleration sensor.
For more information about how to determine what topics are available and how to call listener see: uORB Messaging > Listing Topics and Listening in.