# 手动/自稳模式(多旋翼)


The Manual/Stabilized mode stabilizes the multicopter when the RC control sticks are centred. 要手动使机体移动/飞,您可以移动摇杆使其偏离居中位置。
注解
This multicopter mode is enabled if you set either Manual or Stabilized modes. :::
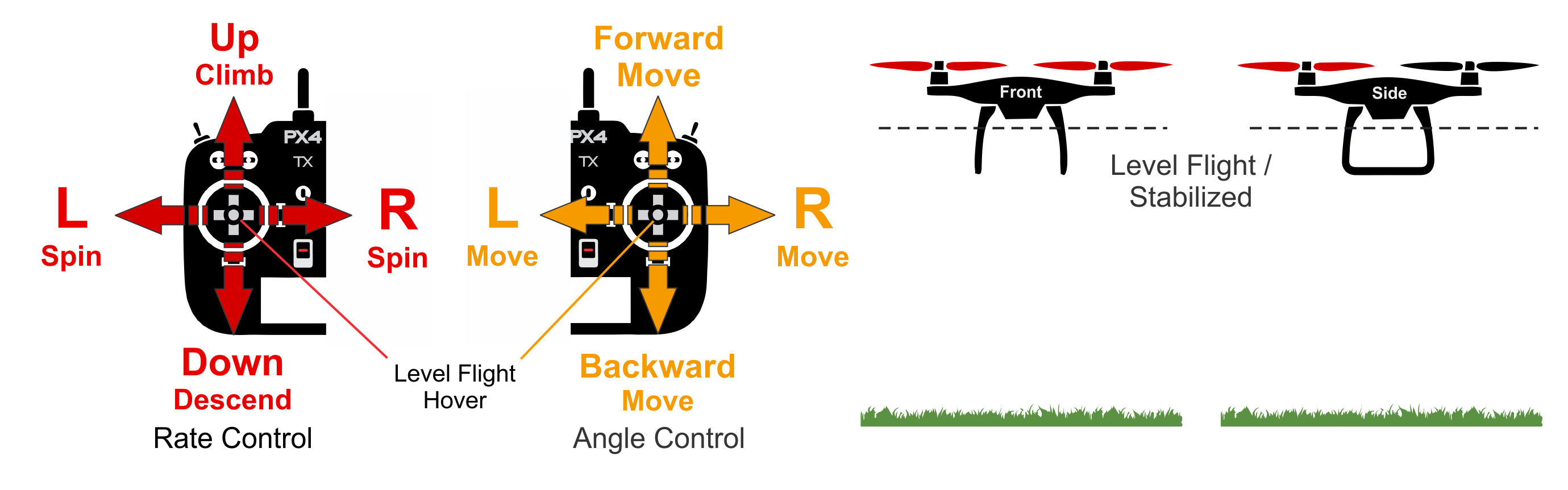
When under manual control the roll and pitch sticks control the angle of the vehicle (attitude) around the respective axes, the yaw stick controls the rate of rotation above the horizontal plane, and the throttle controls altitude/speed.
一旦释放摇杆,它们将会返回中心死区。 一旦横滚和俯仰摇杆居中,多旋翼无人机将平稳并停止运动。 然后机体将悬停在适当的位置/保持高度 - 前提是平衡得当,油门设置适当(在下方查看),并且没有施加任何外力(例如风)。 飞行器将朝着任何风的方向漂移,您必须控制油门以保持高度。
# 技术描述
飞手的输入通过横滚和俯仰角度以及偏航角速率指令传递给自驾仪。 油门被重新调节(参见下面的)并直接传递到输出混控器。 自动驾驶仪控制着姿态,这意味着当遥控器摇杆居中时,它调整飞机的横滚和俯仰角为零(因此使姿态变平)。 自动驾驶仪不能补偿由于风(或其他来源)引起的漂移。
注解
- 需要手动输入(遥控器,或者通过 MAVLink 连接的游戏手柄/拇指摇杆)。 :::
# 参数
| 参数 | 描述 |
|---|---|
| MPC_THR_HOVER | 当油门杆居中输出的悬停油门,默认值为MPC_THR_CURVE。 |
| MPC_THR_CURVE | 定义油门缩放比例。 By default this is set to Rescale to hover thrust, which means that when the throttle stick is centered the configured hover throttle is output (MPC_THR_HOVER) and the stick input is linearly rescaled below and above that (allowing for a smooth transition between Stabilized and Altitude/Position control). 在动力很强的机体上,悬停油门可能非常低(例如低于 20%),因此重新调整会使油门输入变形 - 对应上面举例, 80% 的推力将仅由摇杆输入的中位以上部分控制,20% 的推力由中位以下的部分来控制。 If needed MPC_THR_CURVE can be set to No Rescale so that there is no rescaling (stick input to throttle mapping is independent of MPC_THR_HOVER). |