# 固定翼着陆
PX4 允许自动驾驶控制固定翼 (FW) 在 任务模式、着陆模式 和 返航模式 中着陆。
着陆逻辑有几个阶段,如下所示。 在第一阶段,飞行器将遵循固定的轨道 (FW_LND_ANG) 朝向地面。 在 flare 着陆高度 (FW_LND_FLALT) ,飞行器将开始遵循 flare 路径(曲线基于 FW_LND_HVIRT 的值)。
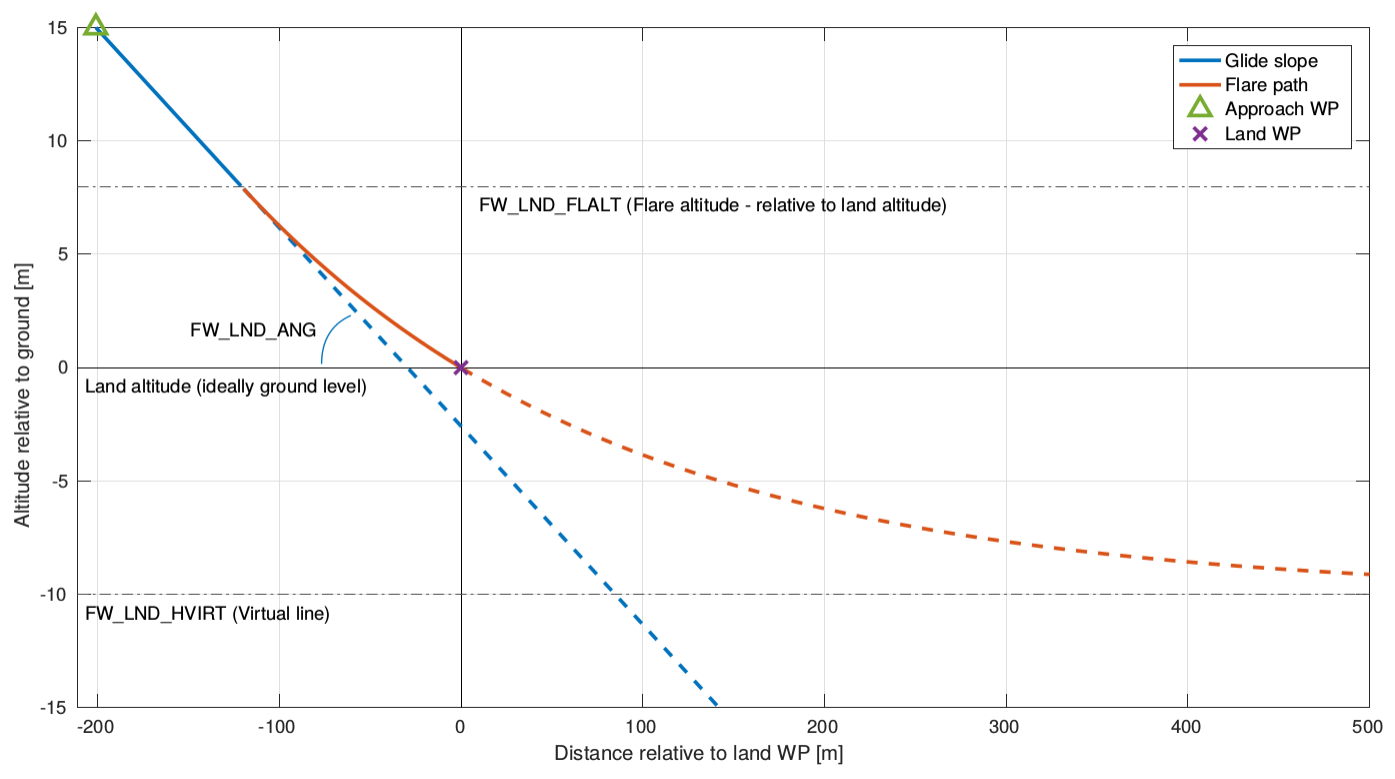
Flare 着陆高度是相对于固定翼“认为”的地平面高度而言的。 在 着陆模式 地面高度是未知的,飞行器将假定地面高度在 0 米(海平面)。 通常情况下,地面高度将远远高于海平面,因此飞行器将在第一阶段着陆(在到达 flare 高度之前它将降落在地面上)。
在任务中,返航模式,或者如果飞行器安装了距离传感器,则可以准确估计地平面高度,着陆行为将如上图所示。
着陆进一步受到下列参数的影响:
| 参数 | 描述 |
|---|---|
| FW_LND_ANG | flaring 前降落坡度角 |
| FW_LND_HVIRT | 用于计算 flare 轨迹的虚拟水平线/高度。这代表了 flare 路径曲线渐近接近的地下高度。 |
| FW_LND_FLALT | 着陆 flare 高度 (相对于着陆高度) |
| FW_LND_TLALT | 着陆油门限制高度(相对着陆高度)。 默认值 -1.0 允许系统默认在 2/3 flare 高度施加油门限制。 |
| FW_LND_HHDIST | 着陆航向保持水平距离 |
| FW_LND_USETER | 在着陆时使用地形估计(从 GPS 获得地面高度)。 默认情况下,这是关闭的,通常使用一个航点或返航高度(或海平面用于任意的着陆位置)。 |
| FW_LND_FL_PMIN | Minimum pitch during flare. A positive sign means nose up Applied once FW_LND_TLALT is reached |
| FW_LND_FL_PMAX | Maximum pitch during flare. A positive sign means nose up Applied once FW_LND_TLALT is reached |
| FW_LND_AIRSPD_SC | 起飞时最小 airspeed scaling factor for landing. Comment: Multiplying this factor with the minimum airspeed of the plane gives the target airspeed the landing approach. FW_AIRSPD_MIN x FW_LND_AIRSPD_SC |