# 用于 Linux 的 S.Bus 驱动
The S.Bus Driver for Linux allows a Linux-based autopilot to access up to 16 channels from a Futaba S.Bus receiver via a serial port. The driver should also work with other receivers that use the S.Bus protocol, including as FrSky, RadioLink, and even S.Bus encoders.
A signal inverter circuit is required (described below) to enable the device serial port to read data from the receiver.
注解
For an S.Bus receiver (or encoder - e.g. from Futaba, RadioLink, etc.) you will usually need to connect the receiver and device via a signal inverter circuit, but otherwise the setup is the same.
Then Start the PX4 RC Driver on the device, as shown below.
# Signal inverter circuit
To start the RC driver on a particular UART (e.g. in this case /dev/ttyS2):
linux_sbus start|stop|status -d <device> -c <channel>
S.Bus 是 inverted UART 通信信号。
# 源代码
S.Bus is an inverted UART communication signal.
The command syntax is:
提示
This circuit is also required to read S.Bus remote control signals through the serial port or USB-to-TTY serial converter.
This section shows how to create an appropriate circuit.
# Required components
- 1x NPN 晶体管(例如 NPN S9014 TO92)
- 1x 10K 电阻
- 1x 1K 电阻
注解
Any type/model of transistor can be used because the current drain is very low.
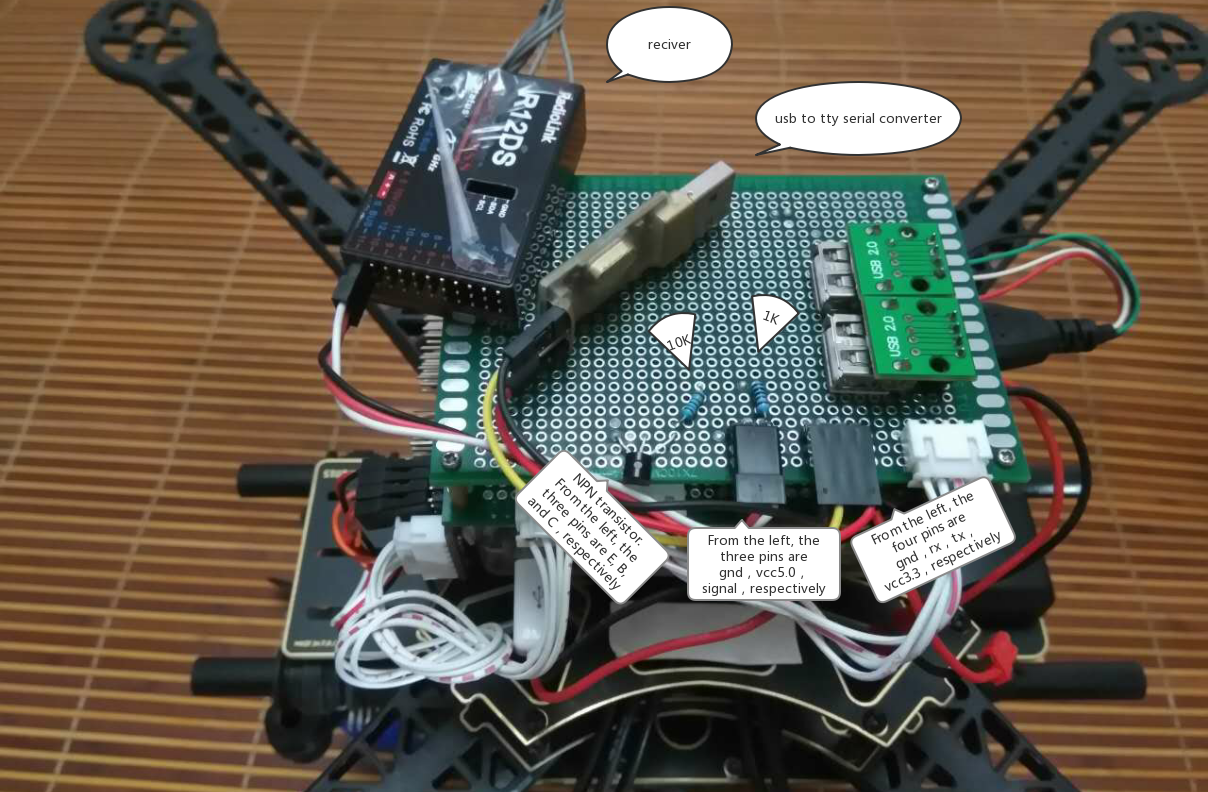
# Circuit diagram/Connections
Connect the components as described below (and shown in the circuit diagram):
- S.Bus 信号→1K 电阻→NPN 晶体管
- NPN晶体管发射→GND
- 3.3VCC&→ 10K电阻→ NPN晶体管集合→ USB-to-TTY rxd
- 5.0VCC→S.Bus VCC
- GND → S.Bus GND

The image below shows the connections on a breadboard.