# Standard Configuration
This section covers the common software configuration and calibration needed for most PX4 vehicles.
You must first load firmware and select your vehicle frame/type. Most other steps can be done out of order, except for tuning, which must be done last.
# Preconditions
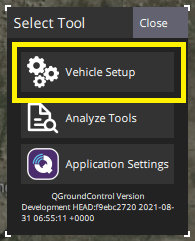
Before starting you should Download QGroundControl (opens new window) and install it on your desktop computer. Then open the QGC application menu ("Q" icon in the top-left corner) and choose Vehicle Setup in the Select Tool popup:
# Configuration Steps
# Firmware/Vehicle Selection
# Motor/Actuator Setup
# Sensor Calibration
- Sensor Orientation
- Compass
- Gyroscope
- Accelerometer
- Level Horizon
- Airspeed (Fixed-wing/VTOL only)
Note: Setup for optional sensors and specific hardware is provided in Flight Controller Peripherals.
# Manual Control Setup
Radio Control:
Joystick/GamePad:
# Safety Configuration
# Tuning
- Autotune (Recommended on vehicles and frames that support it)
# Video Guide
The video below shows most of the calibration process (it uses an older version of QGroundControl, but most of the process is unchanged).
# Support
If you need help with the configuration you can ask for help on the QGroundControl Support forum (opens new window).
# See Also
Flight Controller Peripherals - Setup specific sensors, optional sensors, actuators, and so on.
Advanced Configuration - Factory/OEM calibration, configuring advanced features, less-common configuration.
Vehicle-Centric Config/Tuning: