# Holybro Kakute F7 (Discontinued)
WARNING
PX4 does not manufacture this (or any) autopilot. Contact the manufacturer (opens new window) for hardware support or compliance issues.
The Kakute F7 from Holybro is a flight controller board designed for racers.

Note
This flight controller is manufacturer supported.
# Key Features
- Main System-on-Chip: STM32F745VGT6 (opens new window)
- CPU: 216 MHz ARM Cortex M7 with single-precision FPU
- RAM: 320 KB SRAM
- FLASH: 1 MB
- Standard racer form factor: 36x36 mm with standard 30.5 mm hole pattern
- ICM20689 Accel / Gyro (Soft-mounted)
- BMP280 Baro
- microSD (for logging)
- 6 UARTs
- 1 I2C bus
- 6 PWM outputs
- Built-in OSD chip (AB7456 via SPI)
# Where to Buy
The board can be bought from one of the following shops (for example):
TIP
The Kakute F7 is designed to work with the Tekko32 4-in-1 ESC and they can be bought in combination.
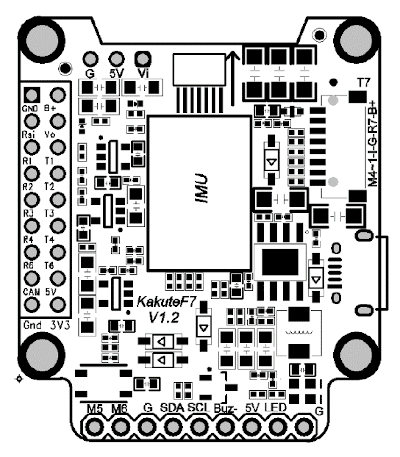
# Connectors and Pins
This is the silkscreen for the Kakute F7, showing the top of the board:
| Pin | Function | PX4 default |
|---|---|---|
| B+ | Battery positive voltage (2S-6S) | |
| 5V | 5V output (2A max) | |
| VO | Video output to video transmitter | |
| VI | Video input from FPV camera | |
| G or GND | Ground | |
| SDA, SCL | I2C connection (for peripherals) | |
| R1, T1 | UART1 RX and TX | TELEM1 |
| R2, T2 | UART2 RX and TX | TELEM2 |
| R3, T3 | UART3 RX and TX | NuttX debug console |
| R4, T4 | UART4 RX and TX | GPS1 |
| R6, T6 | UART6 RX and TX | RC port |
| R7, T7 | UART7 RX and TX (RX is located in the plug for use with 4-in-1 ESCs) | DShot telemetry |
| LED | WS2182 addressable LED signal wire (not tested) | |
| Buz- | Piezo buzzer negative leg (Connect buzzer positive leg to 5V pad) | |
| 3V3 | 3.3V output (200 mA max) | |
| M1 to M4 | Motor signal outputs (located in plug for use in 4-in-1 ESCs) | |
| M5, M6 | Additional motor signal outputs (located on side of board) | |
| RSI | Analog RSSI (0-3.3V) input from receiver | |
| Boot | Bootloader button |
# PX4 Bootloader Update
The board comes pre-installed with Betaflight (opens new window). Before PX4 firmware can be installed, the PX4 bootloader must be flashed. Download the kakutef7_bl.hex (opens new window) bootloader binary and read this page for flashing instructions.
# Building Firmware
To build PX4 for this target:
make holybro_kakutef7_default
# Installing PX4 Firmware
The firmware can be installed in any of the normal ways:
- Build and upload the source
make holybro_kakutef7_default upload - Load the firmware using QGroundControl. You can use either pre-built firmware or your own custom firmware.
# Configuration
If you use a 4-in-1 ESC with Betaflight/Cleanflight motor assignment you can use the Actuator configuration UI to set the motor ordering appropriately.
In addition to the basic configuration, the following parameters are important:
| Parameter | Setting |
|---|---|
| SYS_HAS_MAG | This should be disabled since the board does not have an internal mag. You can enable it if you attach an external mag. |
# Serial Port Mapping
| UART | Device | Port |
|---|---|---|
| USART1 | /dev/ttyS0 | TELEM1 |
| USART2 | /dev/ttyS1 | TELEM2 |
| USART3 | /dev/ttyS2 | Debug Console |
| UART4 | /dev/ttyS3 | GPS1 |
| USART6 | /dev/ttyS4 | RC SBUS |
| UART7 | /dev/ttyS5 | ESC telemetry (DShot) |
# Debug Port
# System Console
UART3 RX and TX are configured for use as the System Console.
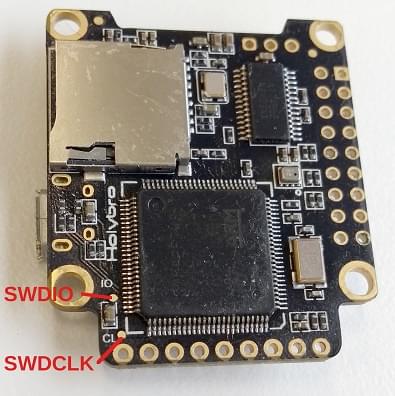
# SWD
The SWD interface (JTAG) pins are:
SWCLK: Test Point 2 (Pin 72 on the CPU)SWDIO: Test Point 3 (Pin 76 on CPU)GND: As marked on boardVDD_3V3: As marked on board
These are shown below.