# Traxxas Stampede VXL
选择这辆车是为了了解Pixhawk如何能够用于轮式平台。 我们选择使用 Traxxas 车辆,因为它们非常受欢迎,是遥控车社区中一个非常强大的品牌。 其目的是建立一个平台,便于使用自动驾驶器控制轮式UGV。

# 配件列表
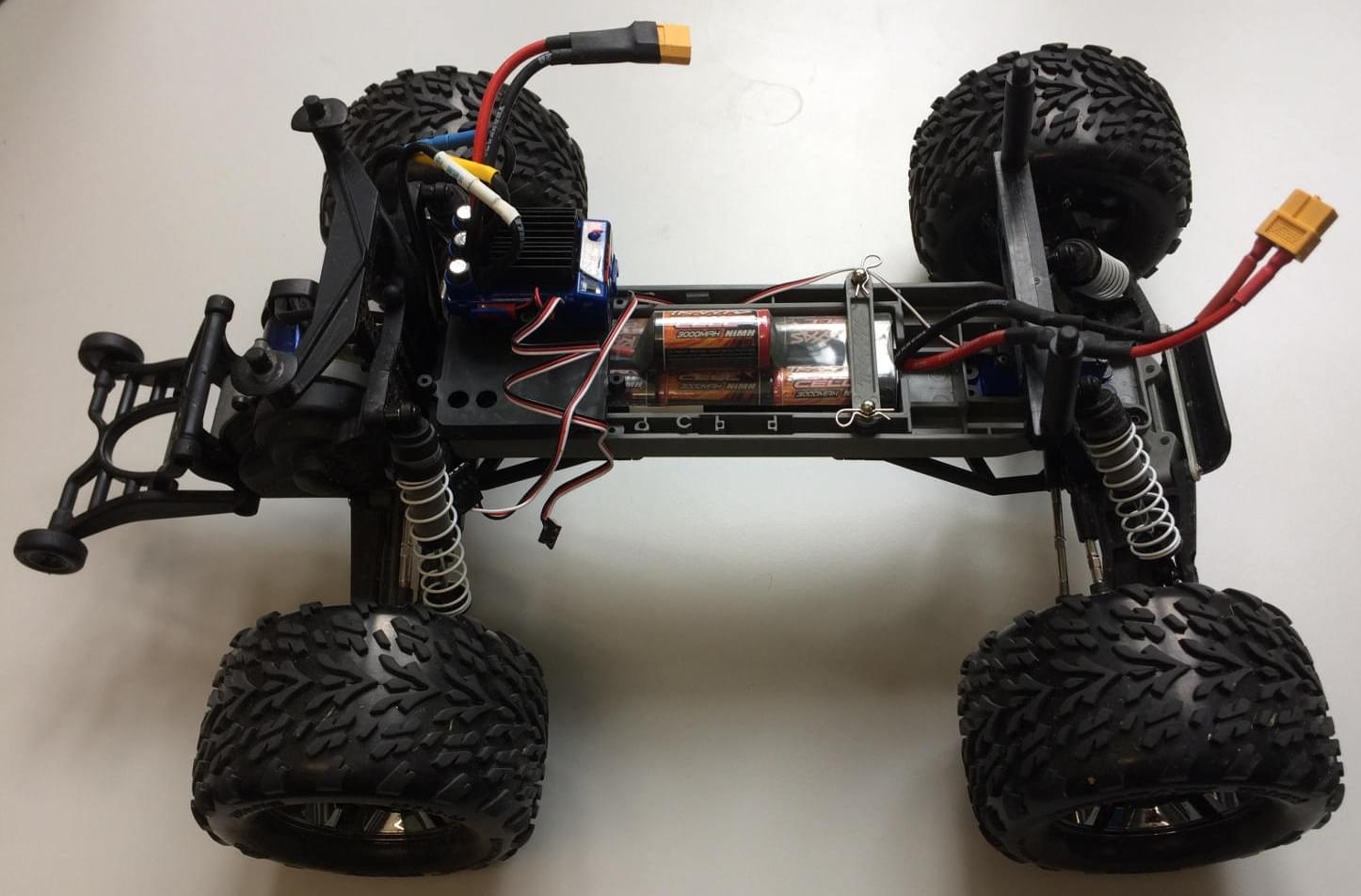
- Traxxas Stampede (opens new window) 除了顶部塑料封面外,其余部分都被使用。
- Pixhawk Mini (停产)
- 3DR 10S 电源模块
- 3DR 433MHz Telemetry Module (EU)
- Spektrum Dxe Controller (opens new window) 或其他 PX4 兼容的遥控器
- Spektrum Quad Race 系列接收机 w/Diversity (opens new window)
- PX4Flow (Deprecated)
# 组装
组装体由一个木质框组成,上面安装所有的自驾仪部件。 测试显示,应使用良好的减震装置,尤其是对于Pixhawk飞控和光流模块。
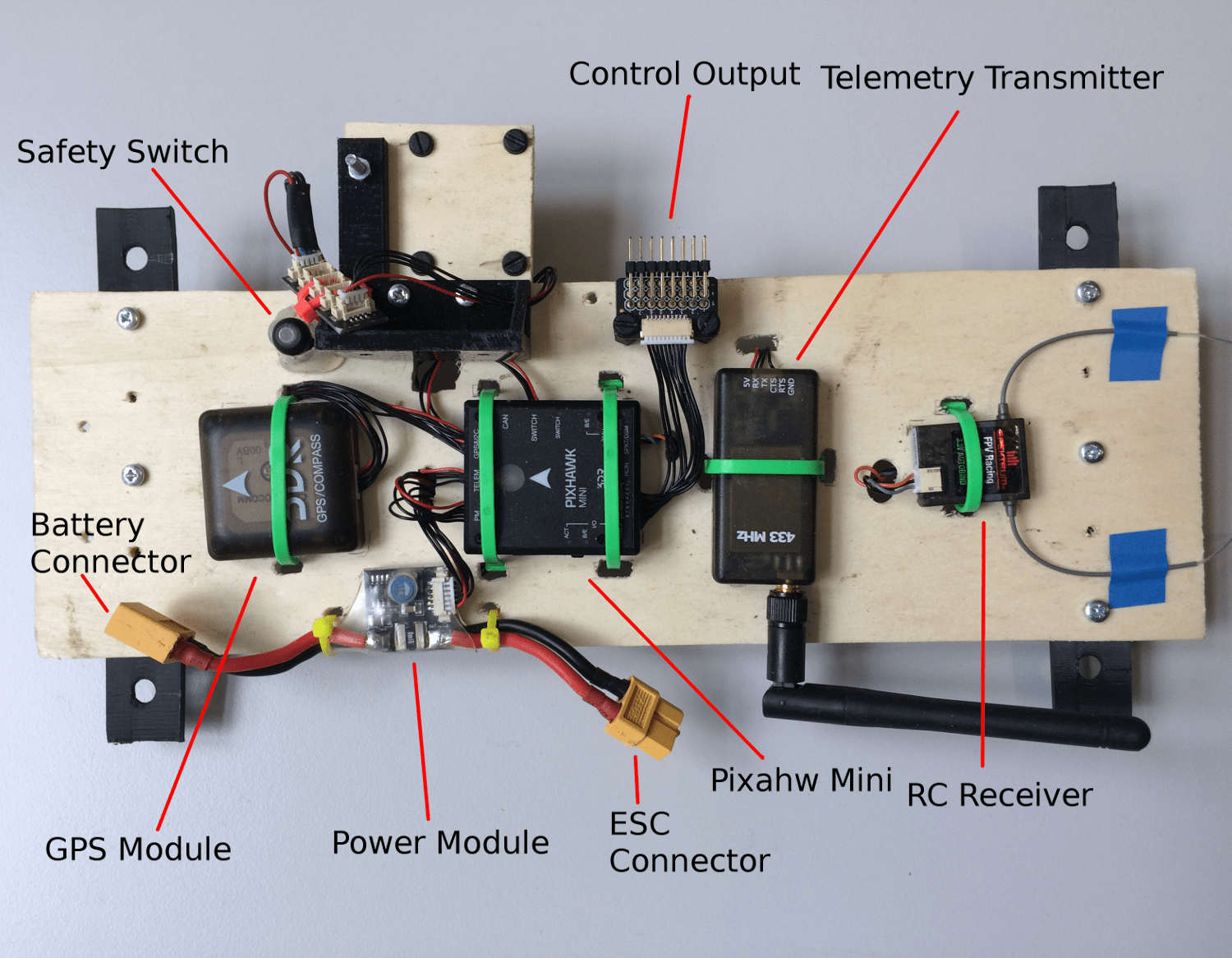
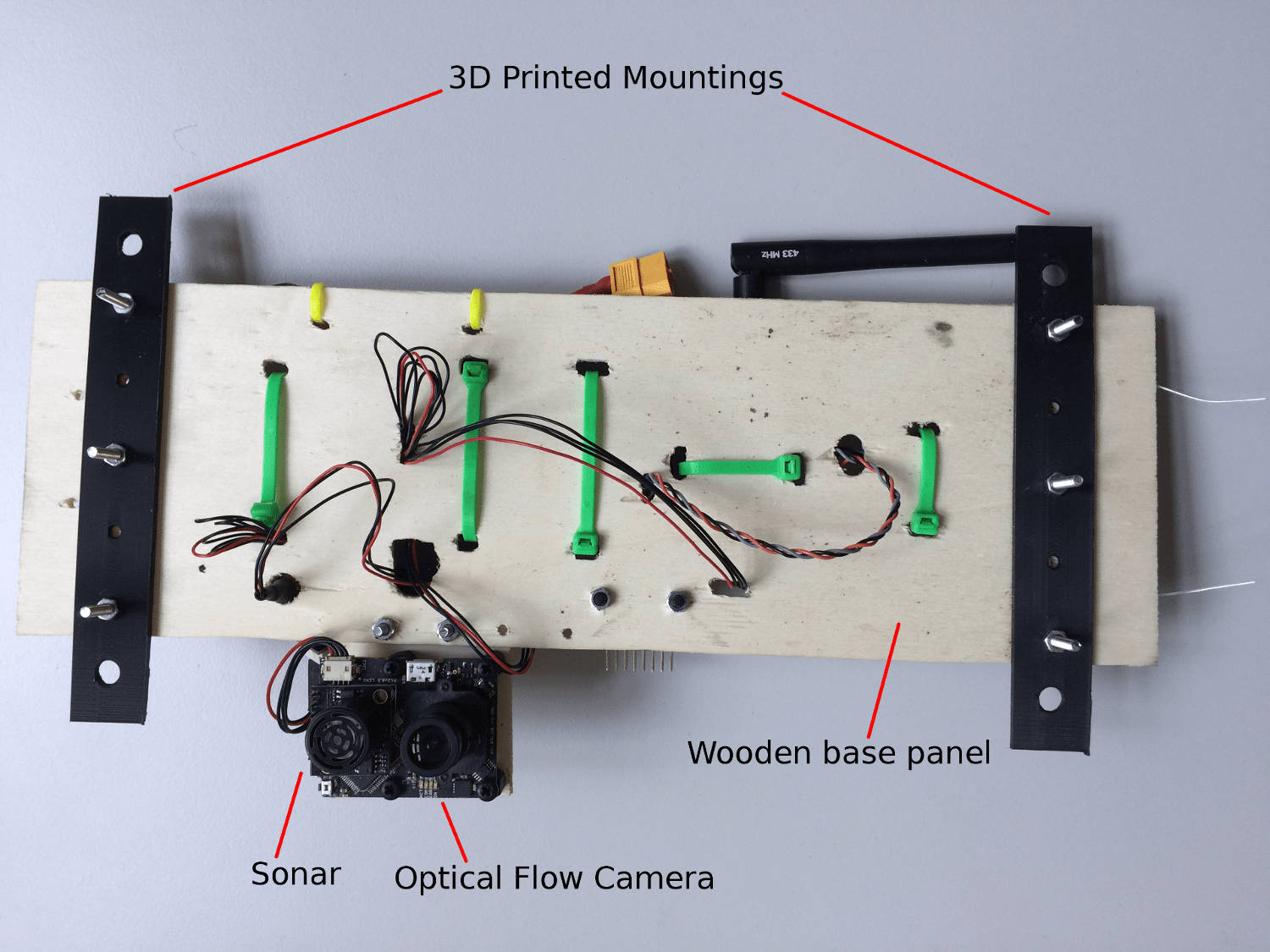


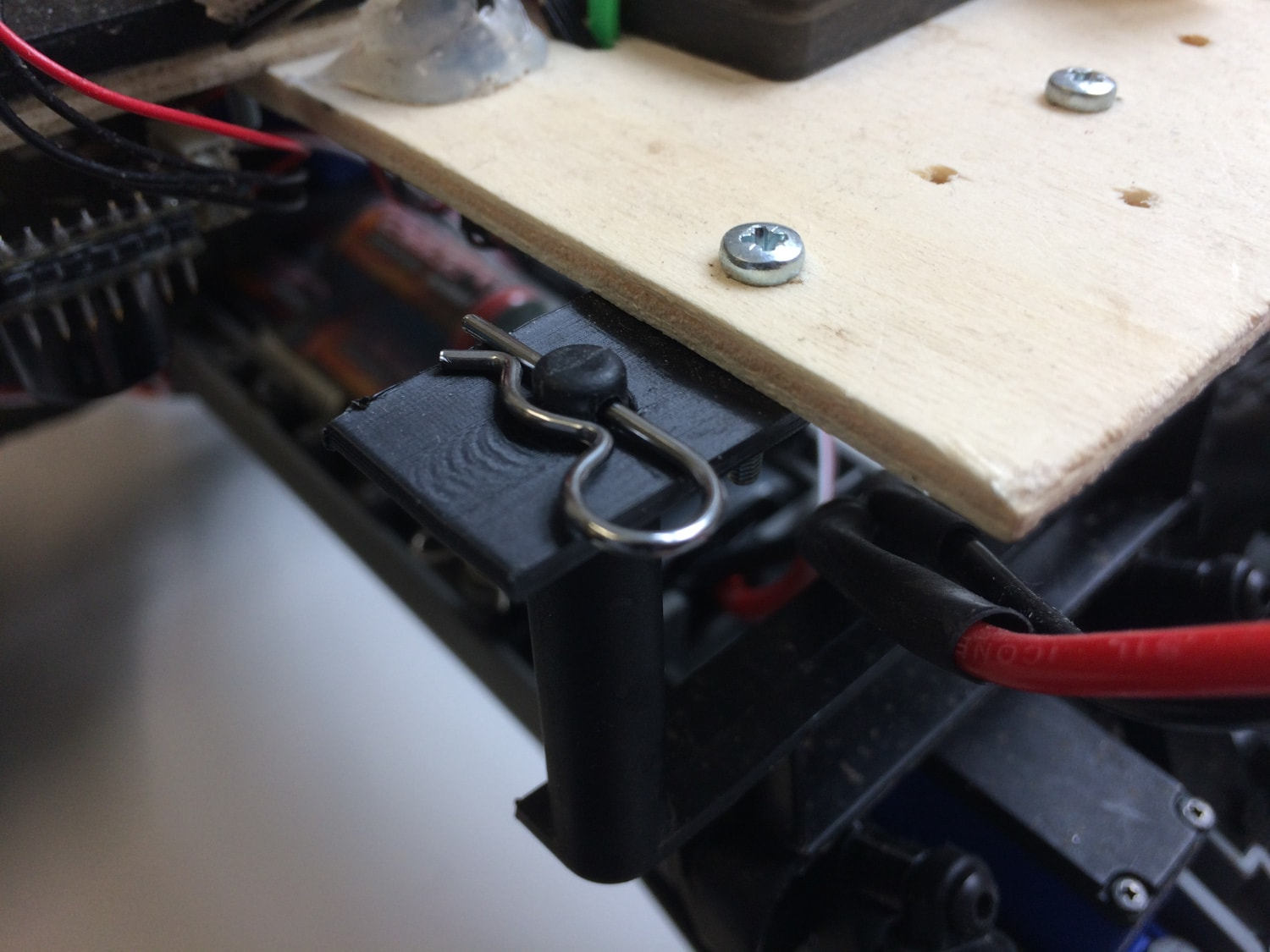
对于这个特定的安装,我们选择使用由小车提供的架子来连接上覆板。 为此,使用3D打印了两个支架。 The CAD files are provided here (opens new window).
注意
It is HIGHLY RECOMMENDED to set the ESC in training mode (see Traxxas Stampede Manual), which reduces power to 50%.
# 输出接口
| PWM 输出 | 执行器 |
|---|---|
| MAIN2 | 转向马达/舵机 |
| MAIN4 | 油门 (ESC输入) |
注解
As documented in the Airframe Reference: Generic ground vehicle (Ackermann).
# 配置
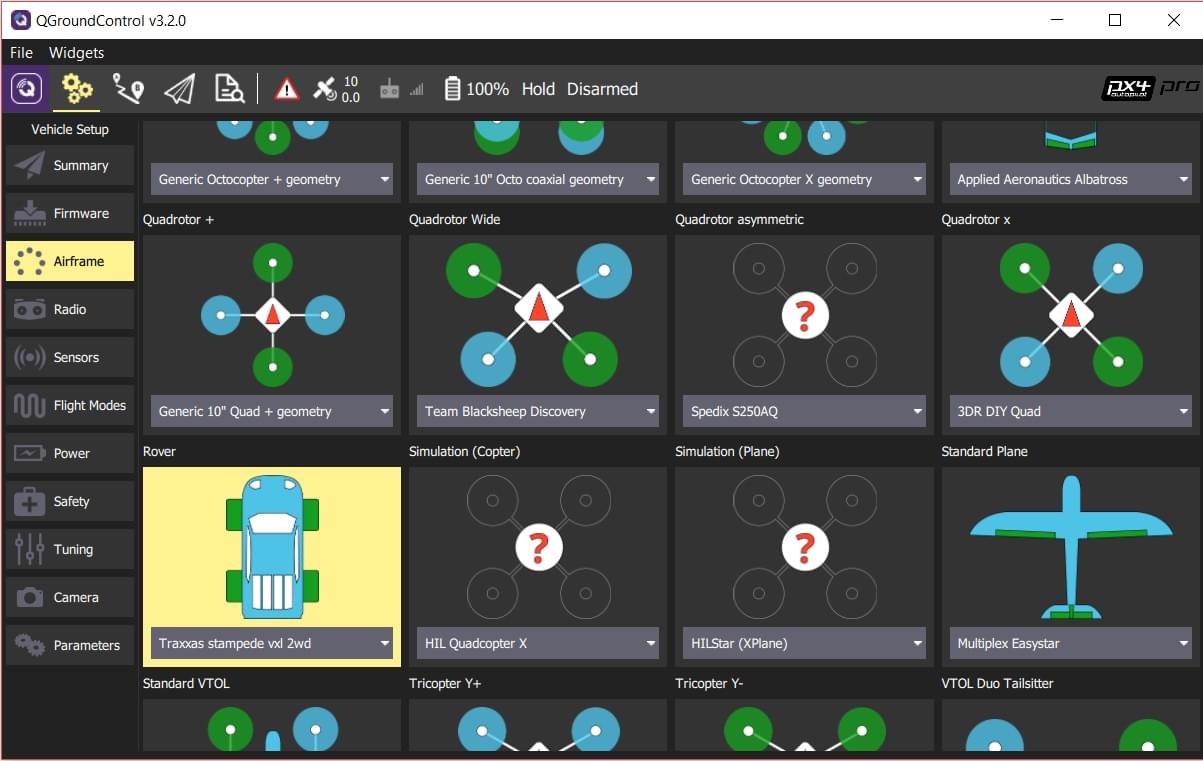
Rovers are configured using QGroundControl in the same way as any other vehicle.
主要的跟小车相关的配置是要设置正确的机架类型:
- Switch to the Basic Configuration section in QGroundControl
- 选择 Airframe 选项卡。
- Scroll down the list to find the Rover icon.
- Choose Traxxas stampede vxl 2wd from the drop down list.
# 用法
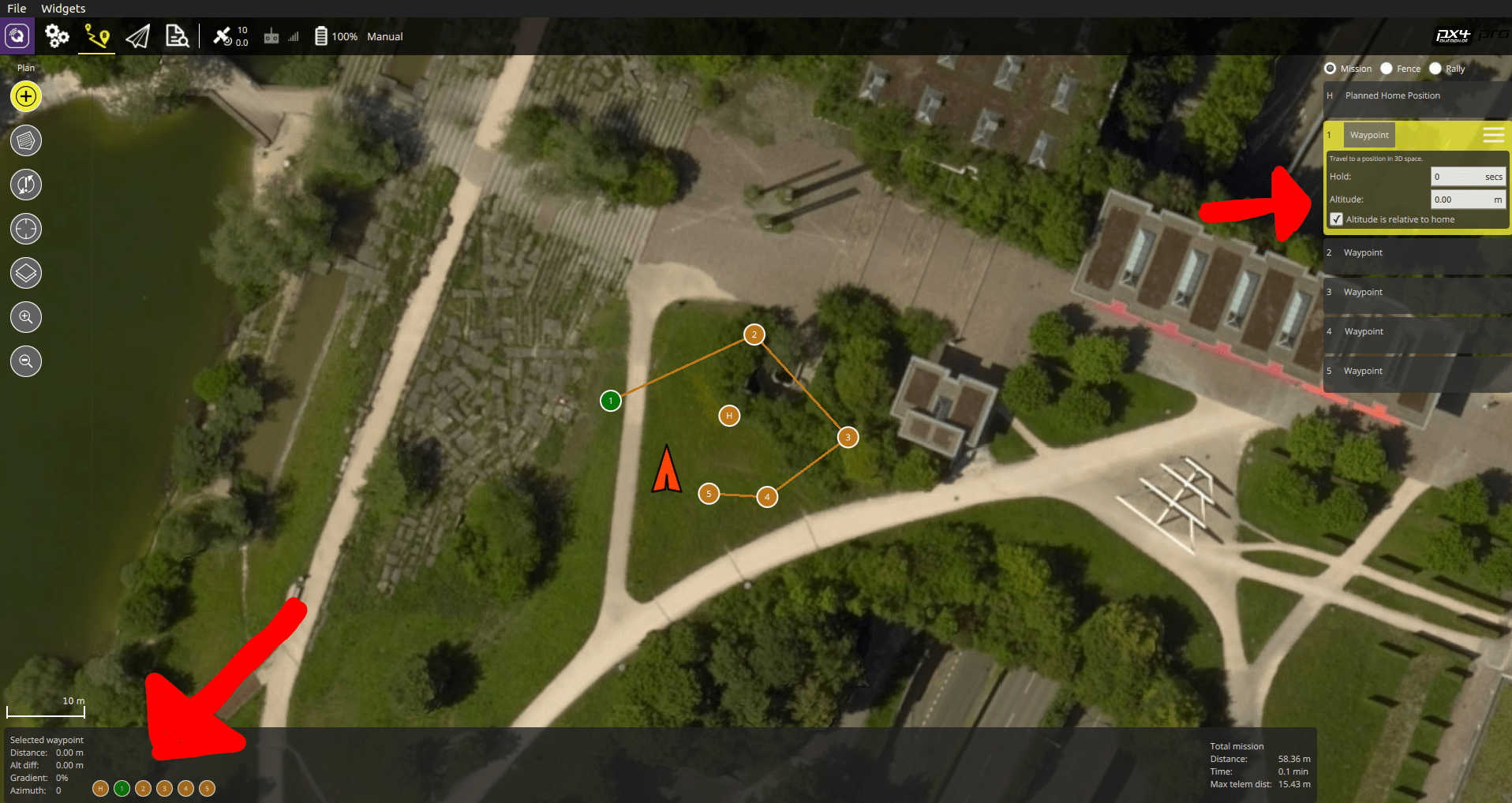
目前,当ESC遥控器时,PX4只支持 MISSION 和MANUAL 模式。 要使用任务模式,请先通过QGC上传一个新任务。 然后,在ARMING之前,选择 MISSION 然后再选择ARM。
注意
It is very important to do a mission composed only* of normal waypoints (i.e. no takeoff waypoints etc.) and it is crucial to set the waypoint height of every waypoint to 0 for correct execution. 如果不这样做,驾驶员就会继续在航点周围旋转。
正确的任务设置如下: