# 가제보 기체
PX4 Gazebo 시뮬레이션과 이를 실행하는 데 필요한 make 명령이 지원하는 차량을 설명합니다(명령은 PX4- Autopilot 디렉토리).
지원되는 차량 유형에는 멀티콥터, VTOL, VTOL 테일시터, 고정익, 로보, 잠수함/UUV가 포함됩니다.
TIP
빌드 대상의 전체 목록을 보려면 make px4_sitl list_vmd_make_targets를 실행하십시오(그리고 gazebo_로 시작하는 대상에서 필터링).
Note
Gazebo에서는 Gazebo 설치 방법, 비디오를 활성화 방법, 사용자 정의 지도 로드 방법 및 기타 여러 설정 옵션을 설명합니다.
# 멀티콥터
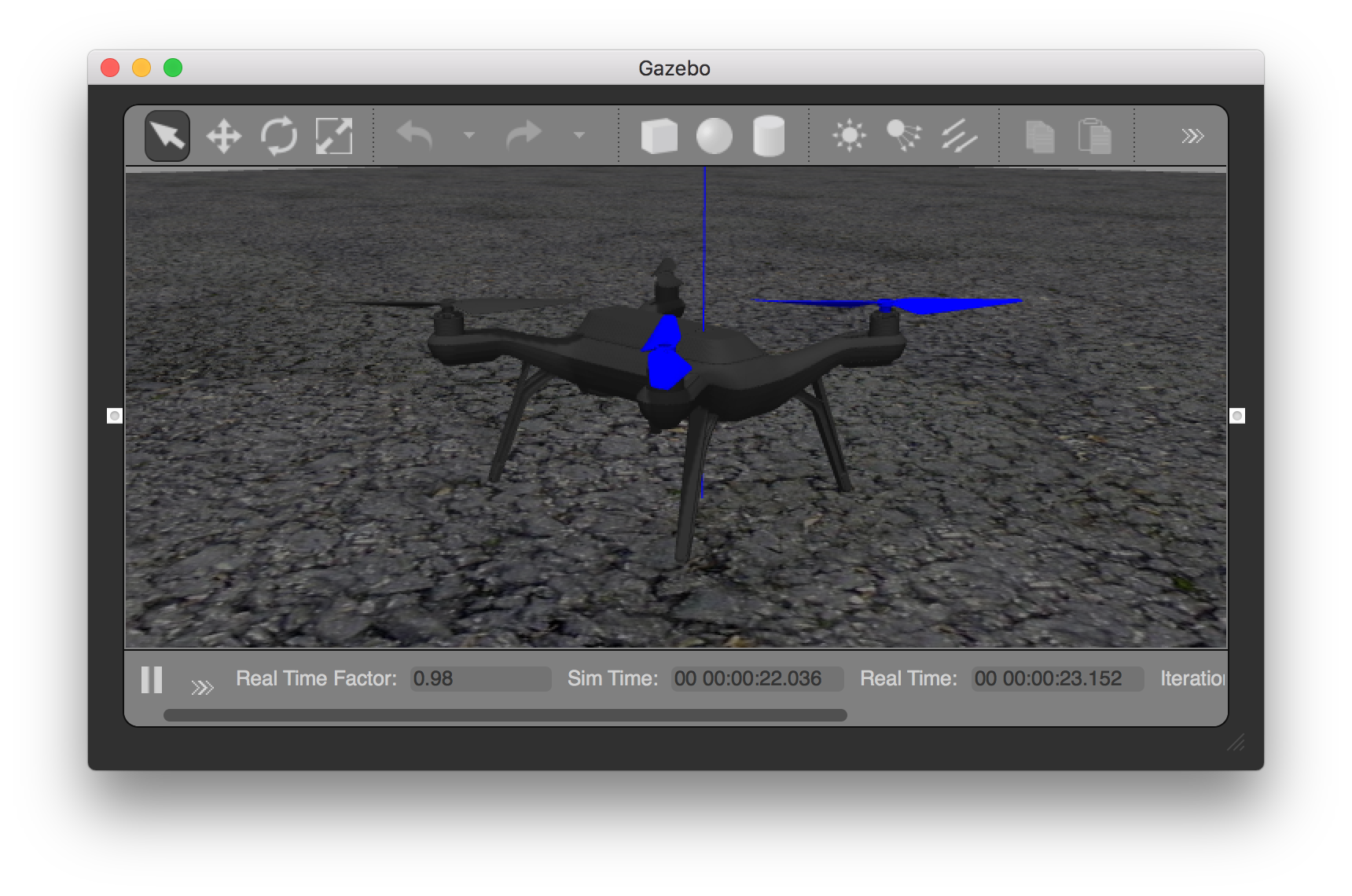
# 쿼드콥터 (기본)
make px4_sitl gazebo
# 광류센서 장착 쿼드콥터
make px4_sitl gazebo_iris_opt_flow
# 3DR Solo (쿼드콥터)
make px4_sitl gazebo_solo
# Typhoon H480 (헥스로터)
make px4_sitl gazebo_typhoon_h480
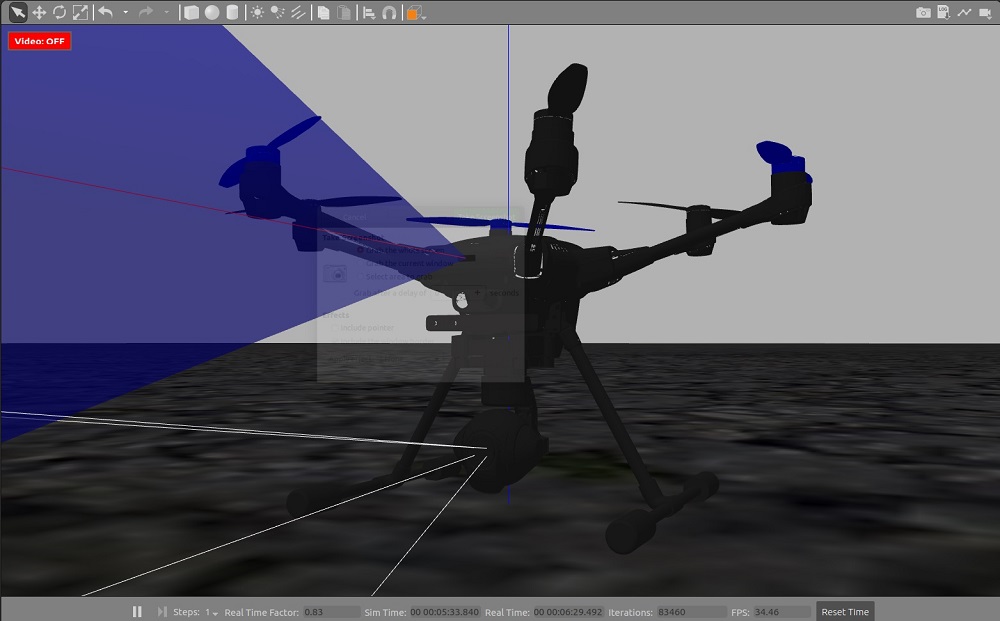
Note
이 타겟은 동영상 스트리밍 시뮬레이션도 지원합니다.
# 비행기/고정익
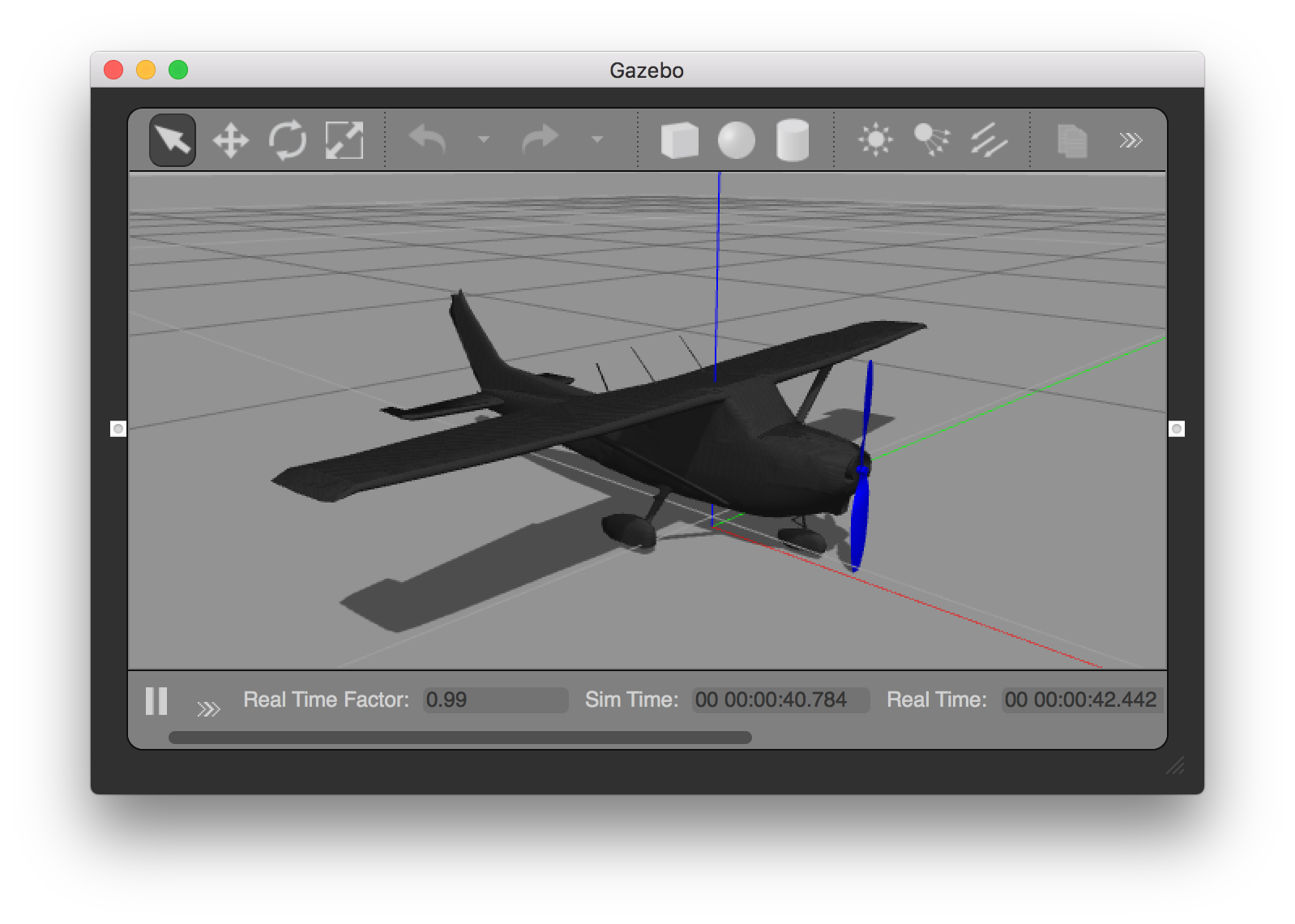
# 표준 비행기
make px4_sitl gazebo_plane
# 투석기 발사형 표준 비행기
make px4_sitl gazebo_plane_catapult
이 모델은 위치 모드, 이륙 모드 또는 임무에서 고정익 이륙에 사용할 수 있는 손/투석기 발사를 시뮬레이션합니다.
차량이 시동이 걸리는 즉시, 비행기가 자동으로 시작됩니다.
# VTOL
# 표준 VTOL
make px4_sitl gazebo_standard_vtol
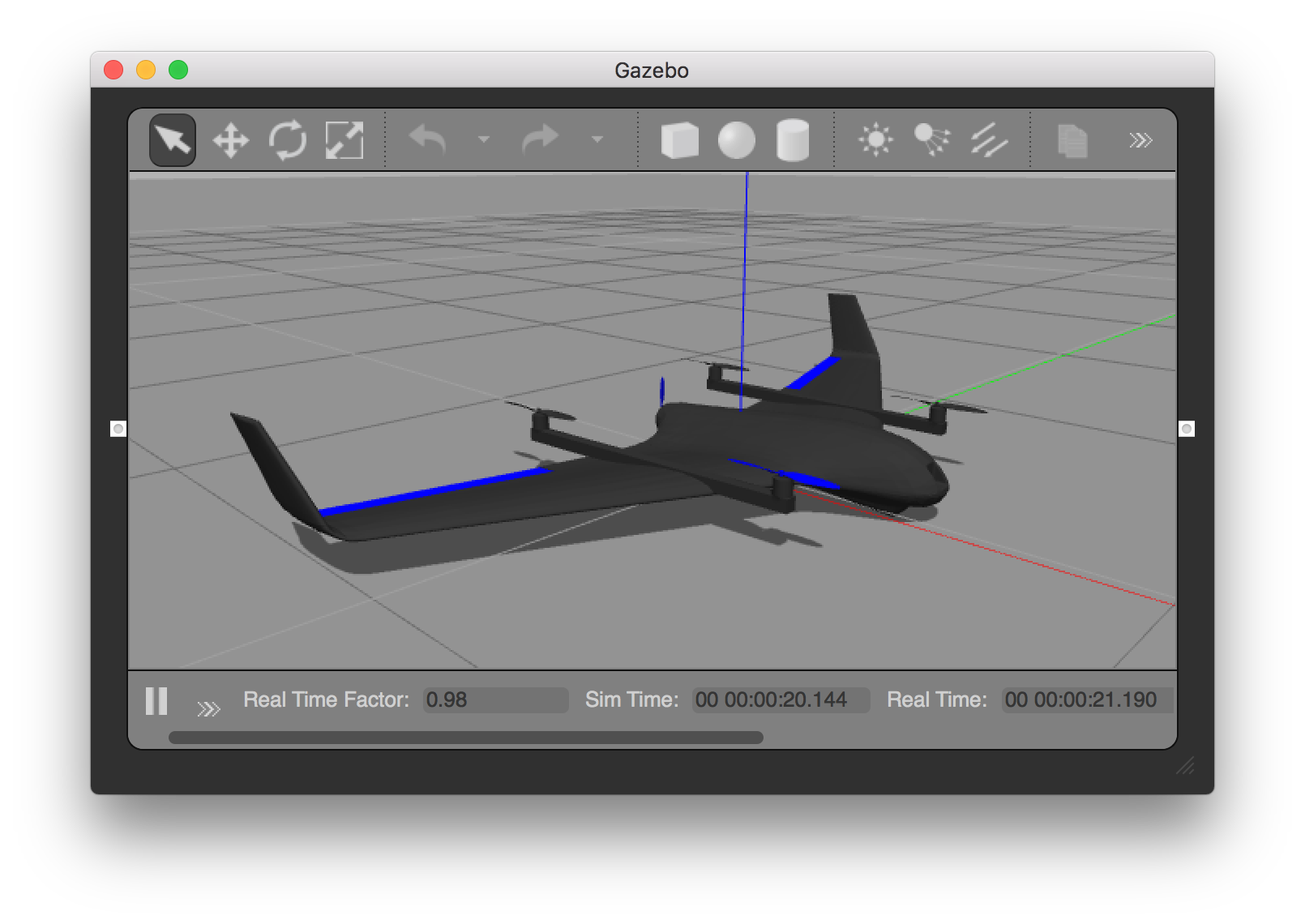
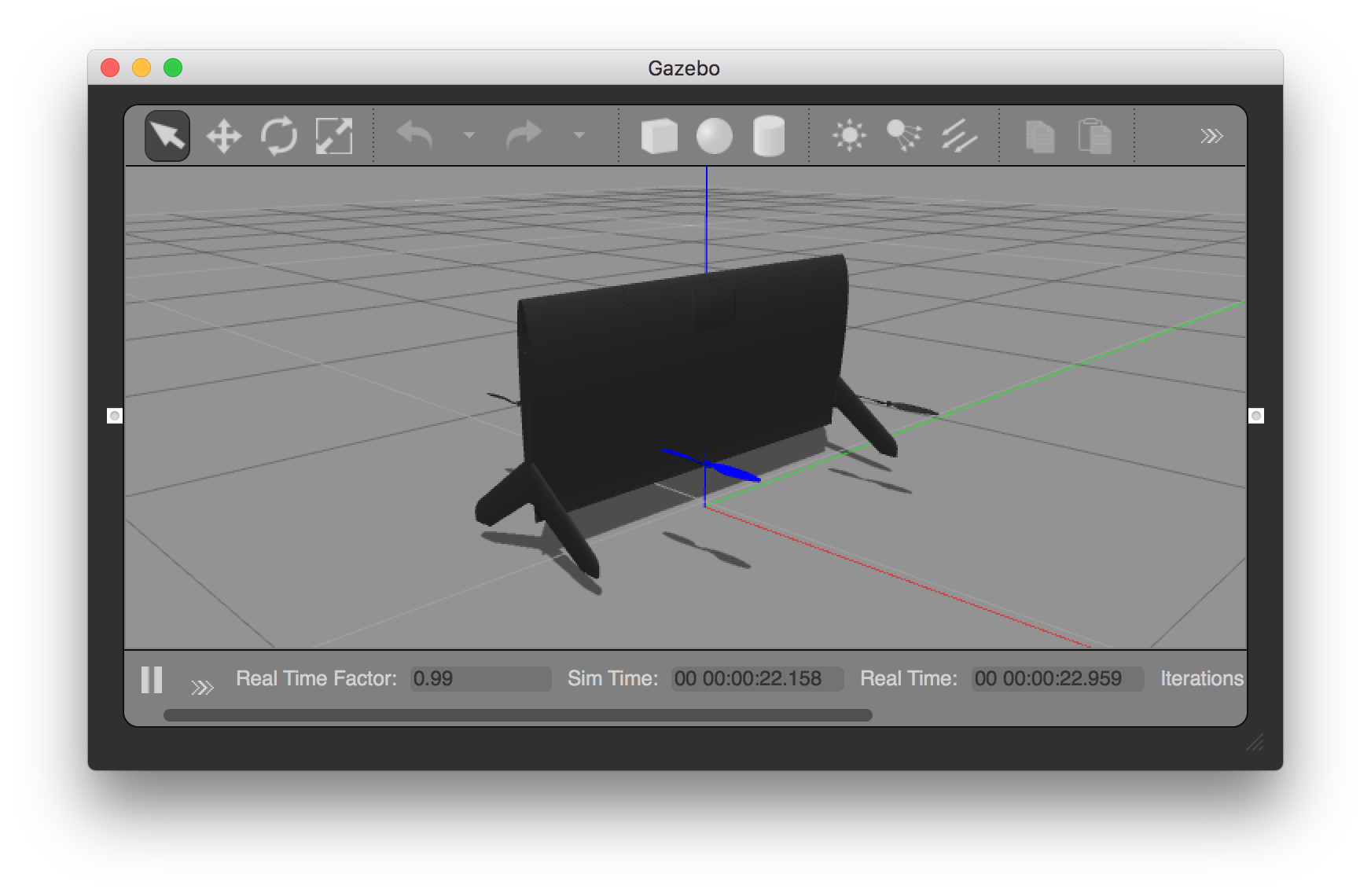
# 테일시터 VTOL
make px4_sitl gazebo_tailsitter
# 무인 지상 차량(UGV/탐사선/자동차)
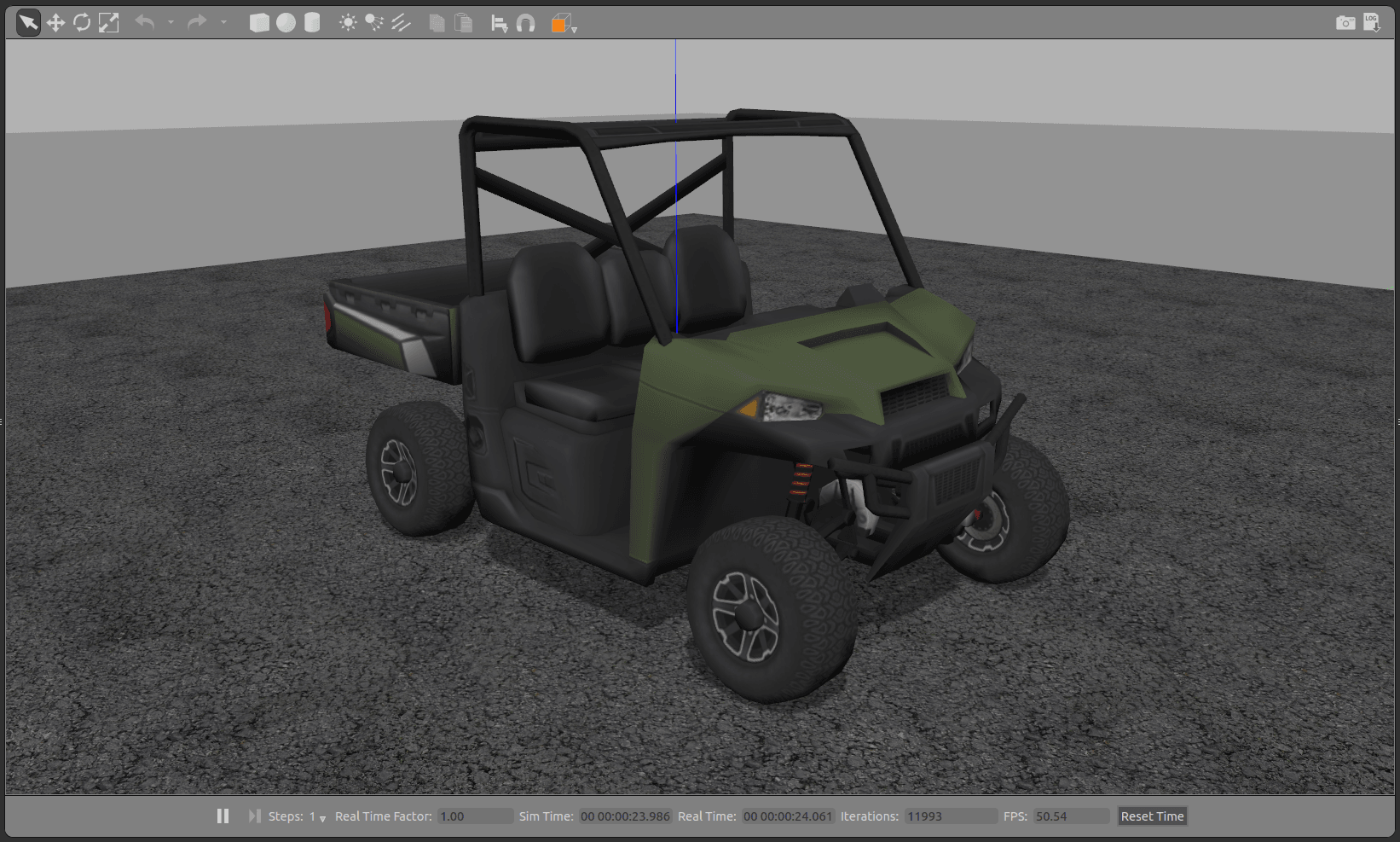
# Ackermann UGV
make px4_sitl gazebo_rover
# 차동 UGV
make px4_sitl gazebo_r1_rover
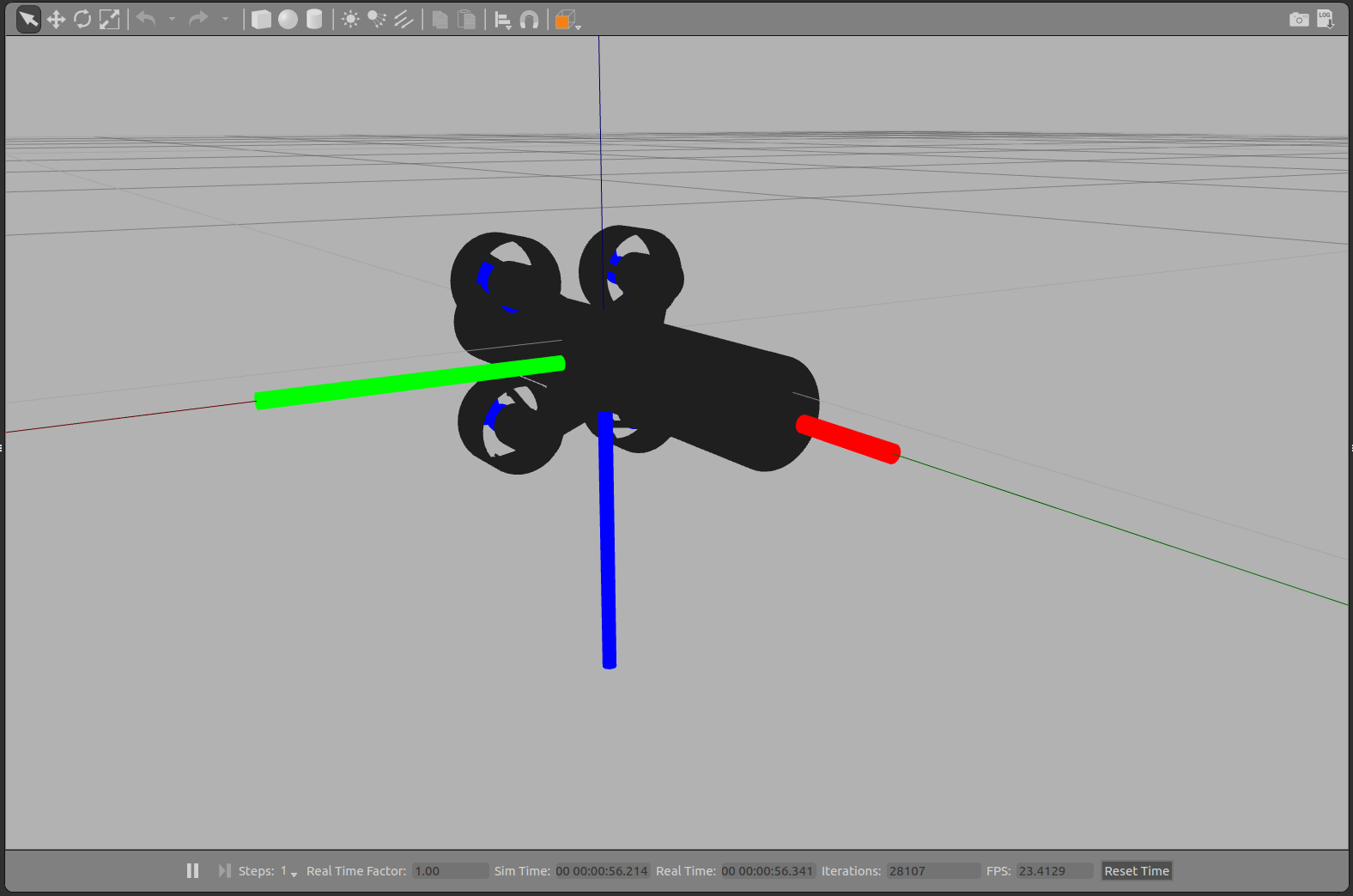
# 무인 수중 차량(UUV/잠수함)
# HippoCampus TUHH UUV
make px4_sitl gazebo_uuv_hippocampus
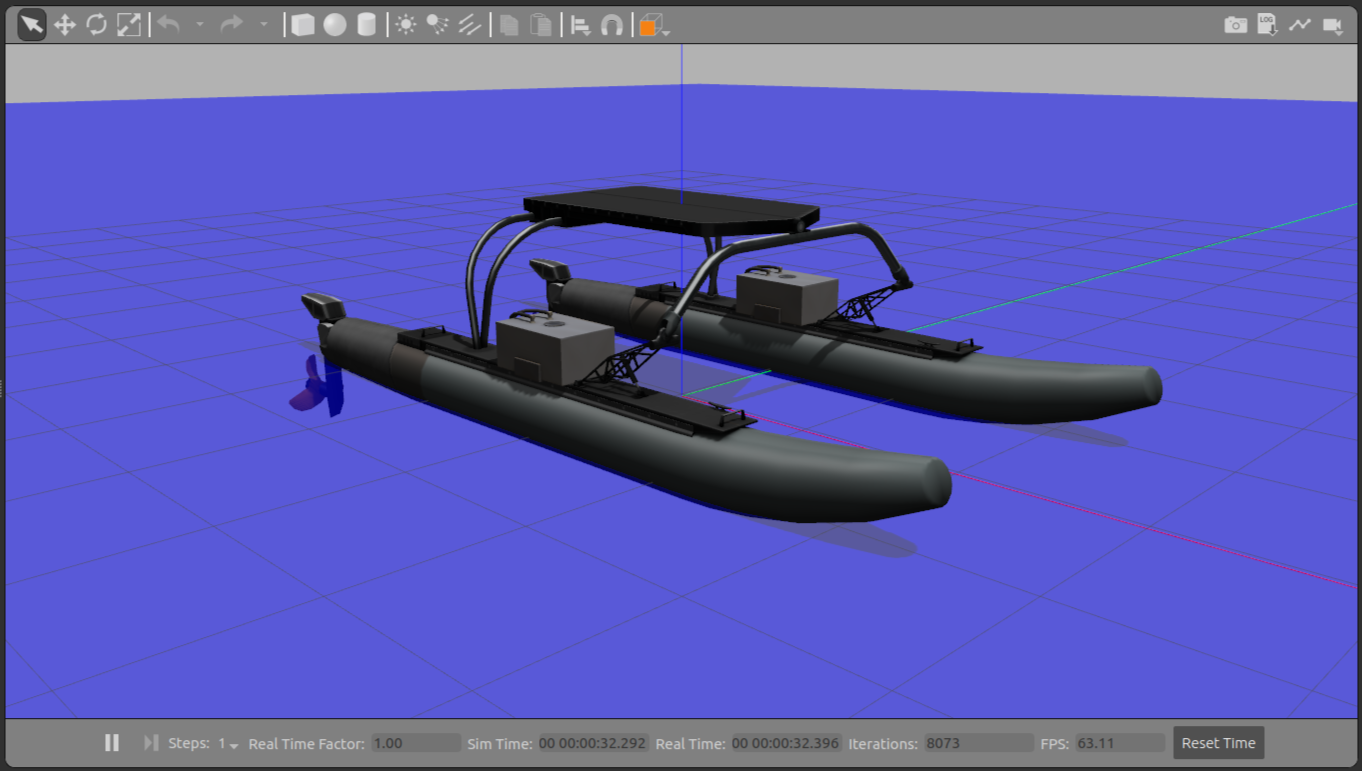
# 무인 수면 기체(USV/보트)
# 보트
make px4_sitl gazebo_boat
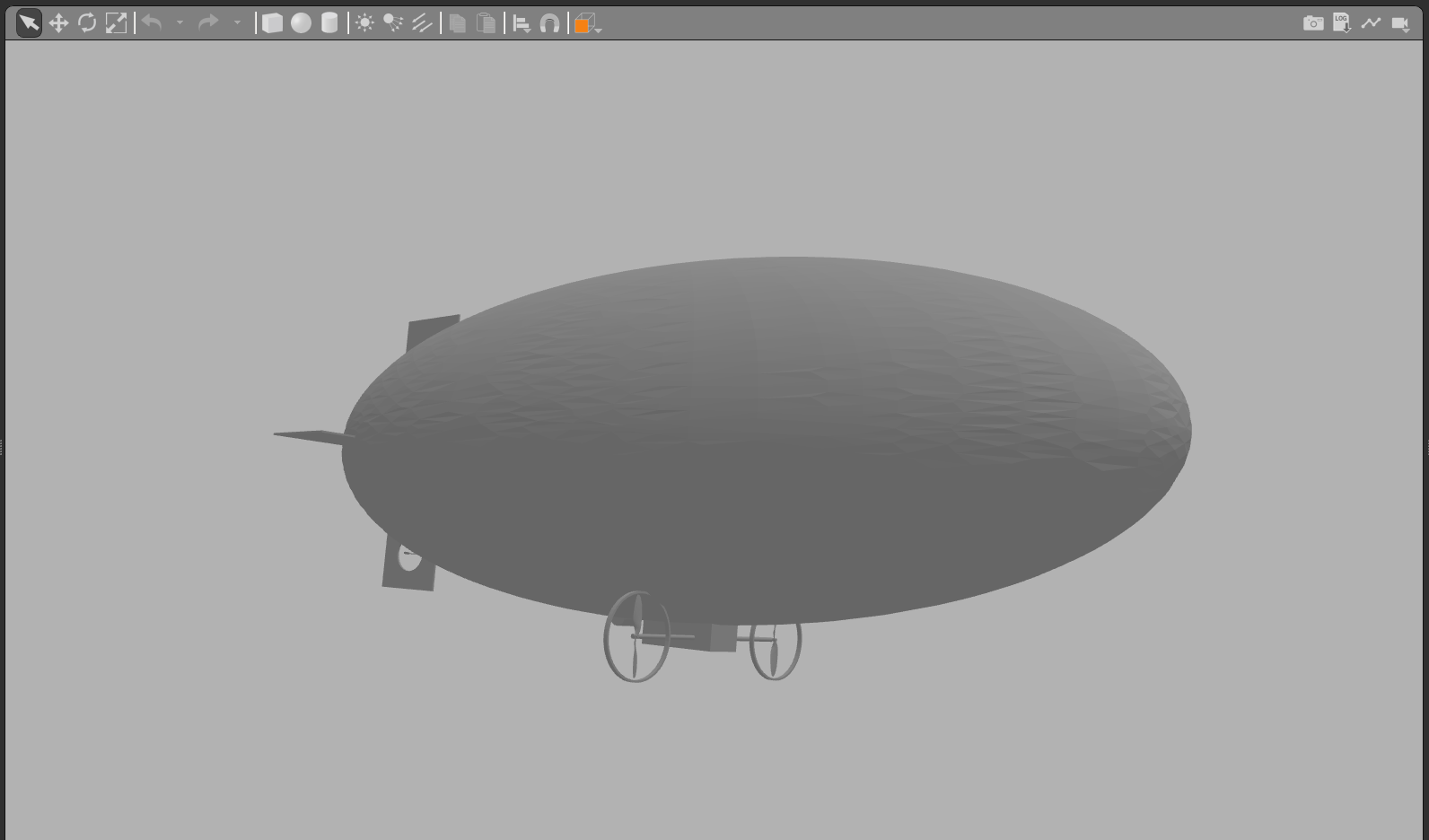
# 비행선
# 클라우드쉽
make px4_sitl gazebo_cloudship