# 가제보 세계
PX4에서 지원하는 가제보 세계에 대한 이미지/정보를 제공합니다.
empty.world는 기본적으로 생성되며, 모델별 세계에 의해 재정의될 수 있습니다. 개발자는 로드할 세계를 수동으로 지정할 수 있습니다. Gazebo Simulation > 특정 세계 로드.
지원되는 세계의 소스 코드는 GitHub의 PX4/sitl_gazebo/worlds (opens new window)을 참고하십시오.
# 빈 세계 (기본)
PX4/sitl_gazebo/worlds/empty.world (opens new window)
![]()
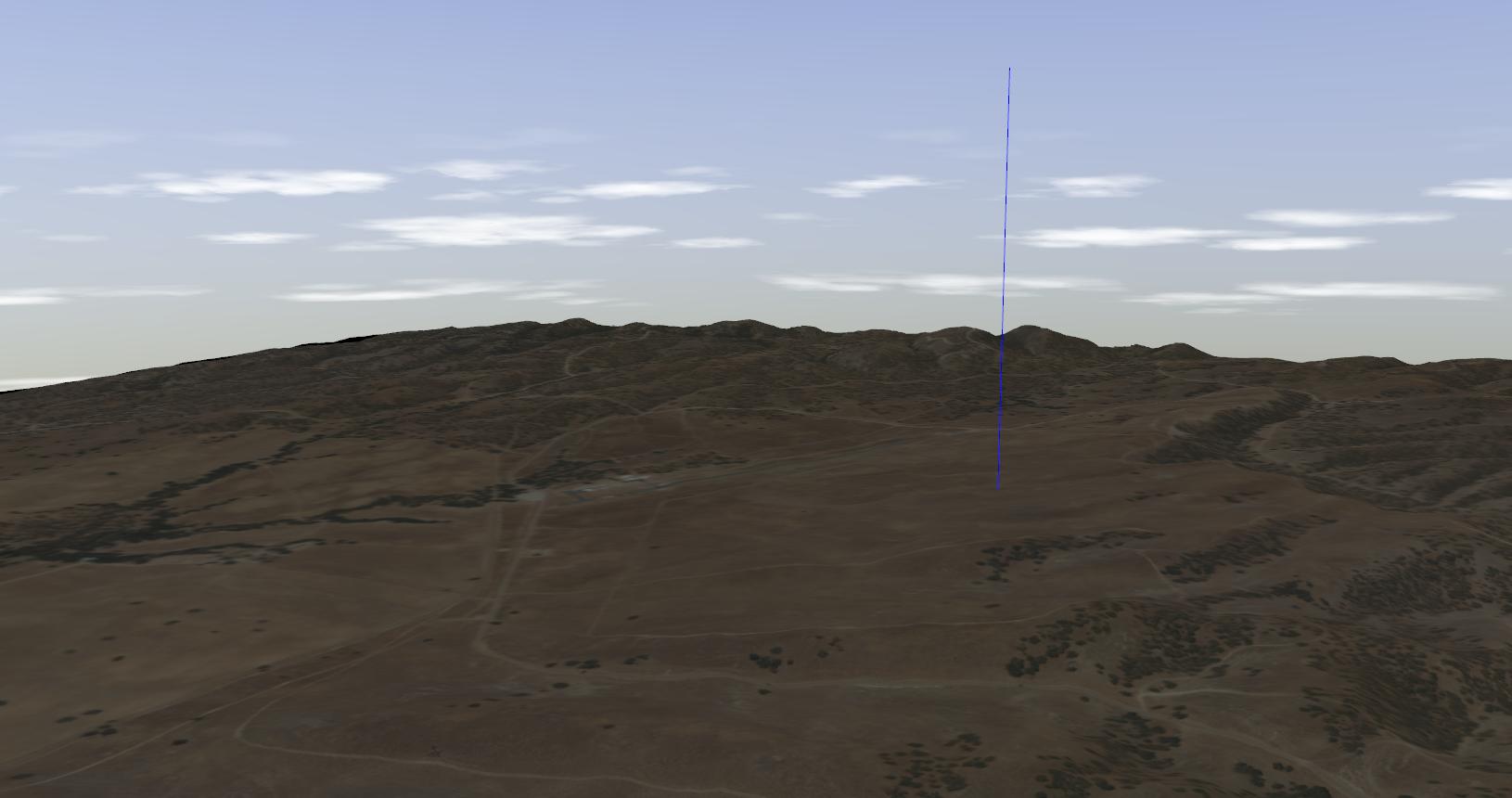
# 베이랜드
PX4/sitl_gazebo/worlds/baylands.world (opens new window)
# KSQL 공항
PX4/sitl_gazebo/worlds/ksql_airport.world (opens new window)

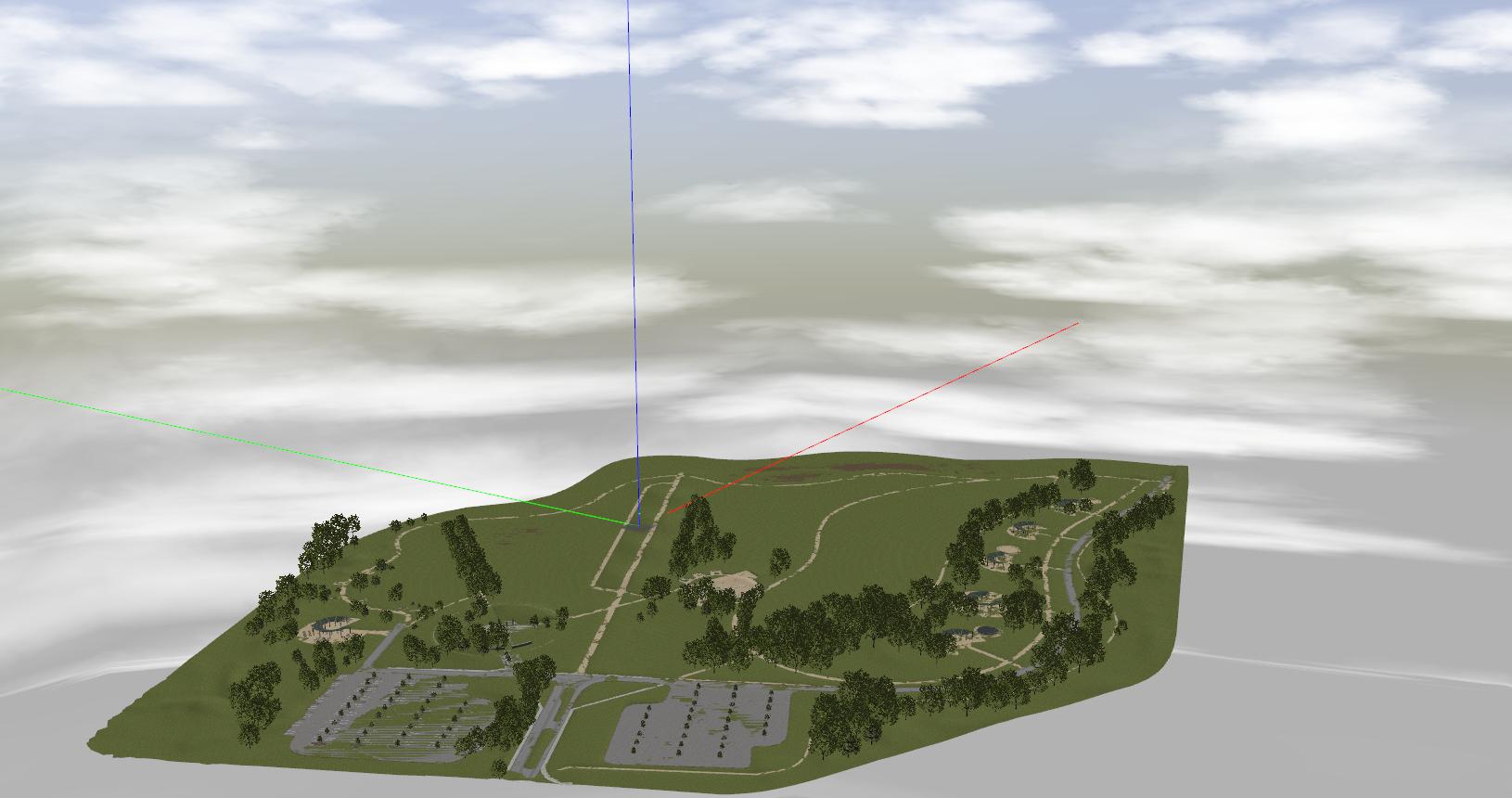
# 맥밀리언 비행장
PX4/sitl_gazebo/worlds/mcmillan_airfield.world (opens new window)
# 소노마 경주로
PX4/sitl_gazebo/worlds/sonoma_raceway.world (opens new window) 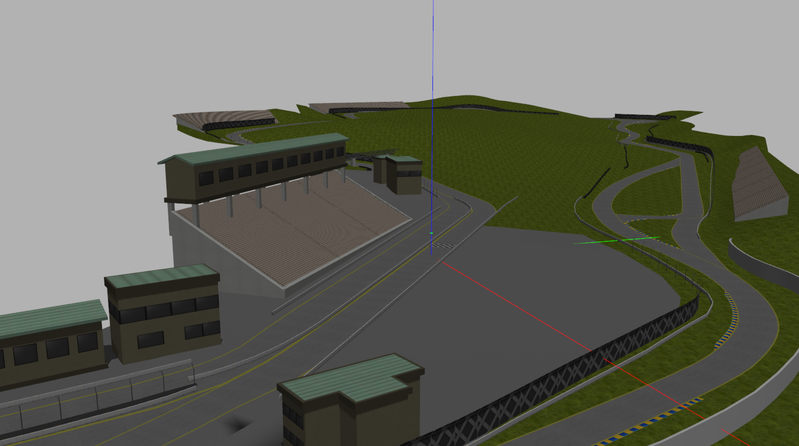
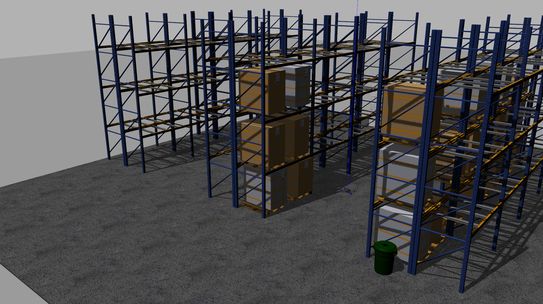
# 창고
PX4/sitl_gazebo/worlds/warehouse.world (opens new window)
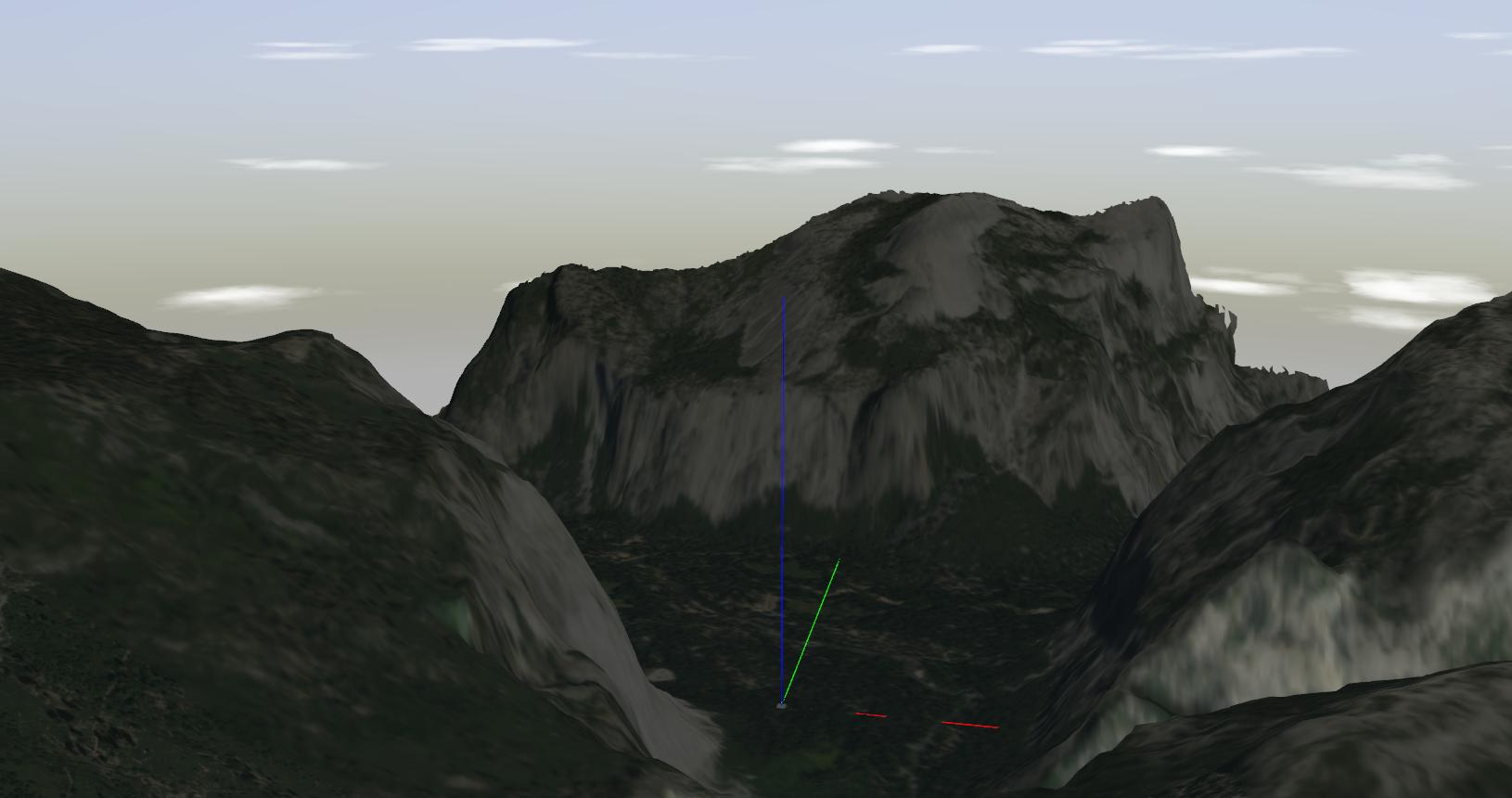
# 요세미티
PX4/sitl_gazebo/worlds/yosemite.world (opens new window)
# 모델별 세계
일부 차량 모델은 특정 세계의 물리/플러그인에 의존합니다. PX4 툴체인은 차량 모델이 존재하는 경우 (기본 empty.world 대신) 동일한 이름을 가진 세계를 자동으로 생성합니다.
모델별 세계는 다음과 같습니다.
- boat.world (opens new window): 보트의 부력을 시뮬레이션하는 표면을 포함합니다.
- uuv_hippocampus.world (opens new window): HippoCampus UUV의 수중 환경을 시뮬레이션하는 빈 세계입니다.
- typhoon_h480.world (opens new window): Typhoon H480(Hexrotor) 차량 모델에서 사용되며 비디오 스트리밍을 활성화/비활성화하는 비디오 위젯을 포함합니다. 세계에는 시뮬레이션 카메라 전망대 플러그인이 포함되어 있습니다.
- iris_irlock.world (opens new window): 정밀 착륙 테스트를 위한 IR 비콘이 포함되어 있습니다.