# UAVCAN 기수 부여 및 설정
Note
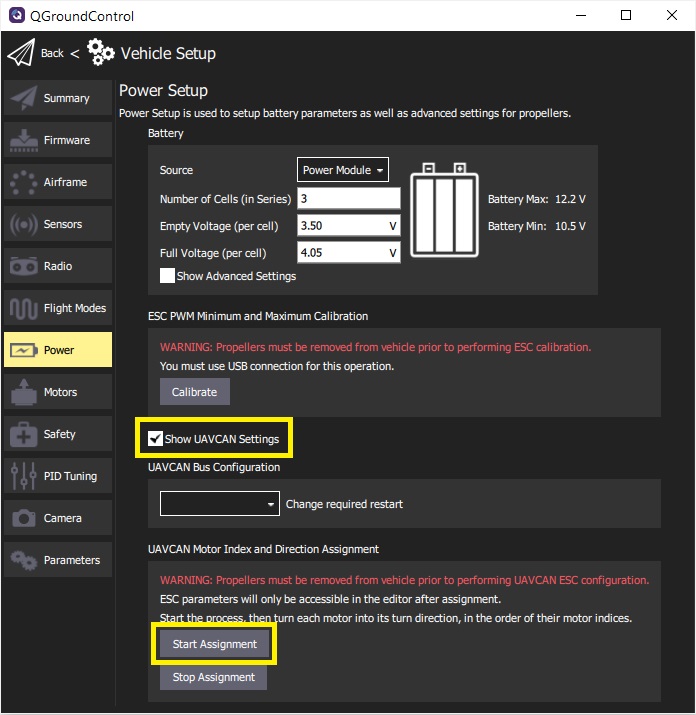
아래와 같이 'UAVCAN 사용' 확인 상자에 표시하여 기본 모터 출력 버스로서 UAVCAN을 가동하십시오. 또는, QGroundControl 매개변수 편집기에서 UAVCAN_ENABLE 매개변수 값을 '3'으로 설정할 수 있습니다. '2'로 설정하면 CAN을 가동할 수 있으나, PWM 모터 출력 설정이 남습니다.
QGroundControl을 활용하여 설정 보기로 전환하십시오. 좌측의 전원 설정을 선택하십시오. '할당 시작' 단추를 누르십시오.
처음 비프음이 울린 다음에는 처음 전동 변속기의 프로펠러를 올바른 회전 방향으로 재빨리 돌리십시오. 전동 변속기는 기수를 부여할 때마다 비프음을 냅니다. 모터 맵에 나타난대로 이 단계를 모든 모터 컨트롤러에 순서대로 반복하십시오. 전동 변속기를 구동하는 Sapog 펌웨어에 새 기수 ID를 적용하려면 다시 부팅해야합니다. 이 과정은 한번만 진행하면 되며, 펌웨어 업그레이드 진행 후 반복할 필요가 없습니다.