# PWM_limit 状态机
[PWM_limit 状态机] 以锁定(pre-armed)和解锁(armed)模式作为功能函数的输入量对飞控的 PWM 输出进行控制, 并且会在解锁指令发出后、飞机油门增加之前引入一个延时。 并且会在解锁指令发出后、飞机油门增加之前引入一个延时。
# 总览
输入
- 解锁(armed)模式:宣告允许执行危险的动作指令,如转动螺旋桨。
- 锁定(pre-armed)模式:宣告允许执行温和的动作指令,如移动控制舵面。
- 该输入会覆盖当前状态。
- 激活 锁定(pre-armed)模式后无论飞控当前处于什么状态,飞控都会立刻终止状态 ON 的运转。
- 取消 锁定(pre-armed)模式会使飞控返回到当前状态。
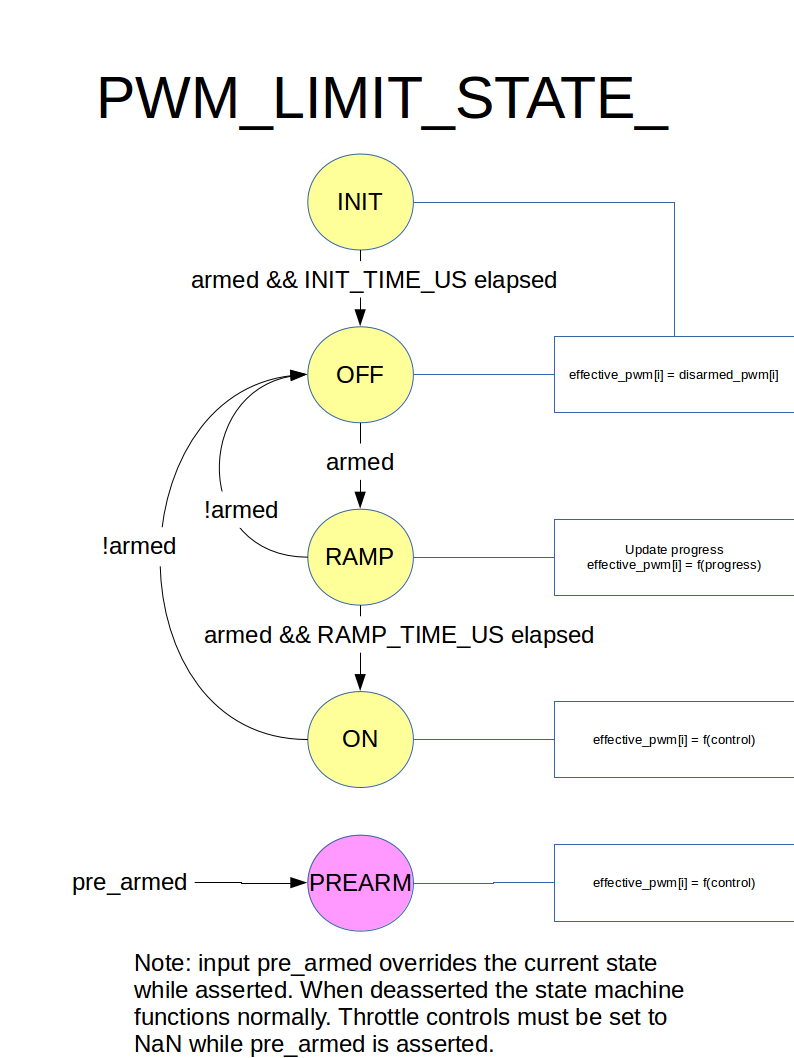
状态
- INIT 和 OFF
- pwm 输出设置为锁定状态的值。
- RAMP
- pwm 输出从锁定状态的值上升到解锁状态的最小值。
- ON
- 根据实际控制量设定 pwm 的输出值。
# 状态转移图