# BlueROV2 (UUV)
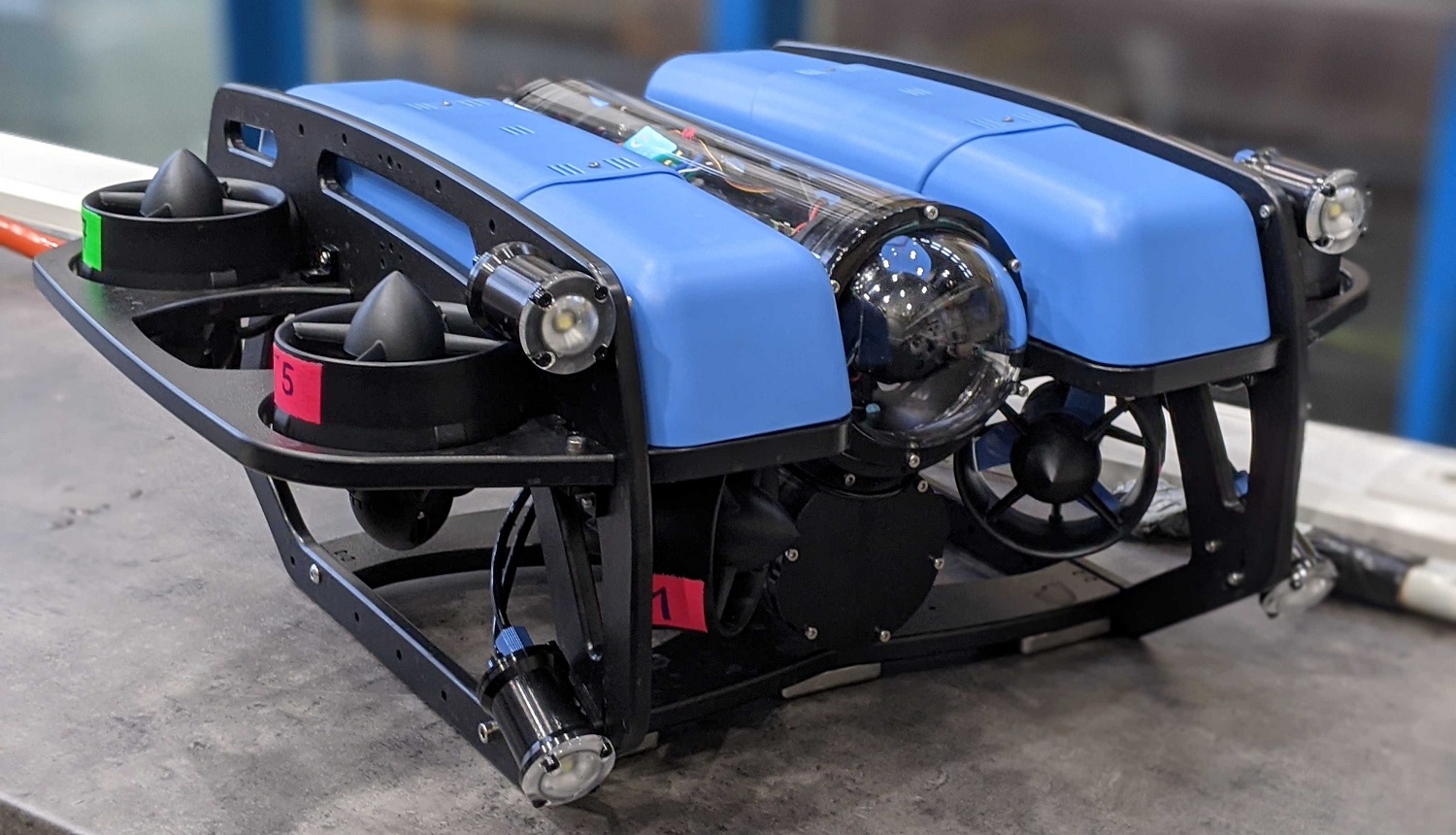
The BlueROV2 (opens new window) is an affordable high-performance underwater vehicle that is perfect for inspections, research, and adventuring.
PX4 provides experimental support for an 8-thrust vectored configuration, known as the BlueROV2 Heavy Configuration.
# Purchase
BlueROV2 (opens new window) + BlueROV2 Heavy Configuration Retrofit Kit (opens new window)
# Motor Mapping/Wiring
The motors must be wired to the flight controller following the standard instructions supplied by BlueRobotics for this vehicle .
The vehicle will then match the configuration documented in the Airframe Reference:

- MAIN1: motor 1 CCW, bow starboard horizontal, , propeller CCW
- MAIN2: motor 2 CCW, bow port horizontal, propeller CCW
- MAIN3: motor 3 CCW, stern starboard horizontal, propeller CW
- MAIN4: motor 4 CCW, stern port horizontal, propeller CW
- MAIN5: motor 5 CCW, bow starboard vertical, propeller CCW
- MAIN6: motor 6 CCW, bow port vertical, propeller CW
- MAIN7: motor 7 CCW, stern starboard vertical, propeller CW
- MAIN8: motor 8 CCW, stern port vertical, propeller CCW
# Airframe Configuration
BlueROV2 does not come with PX4 installed. You will need to:
- Install PX4 Firmware
Note
Prior to PX4 v1.12 you will need to install the "master" version.
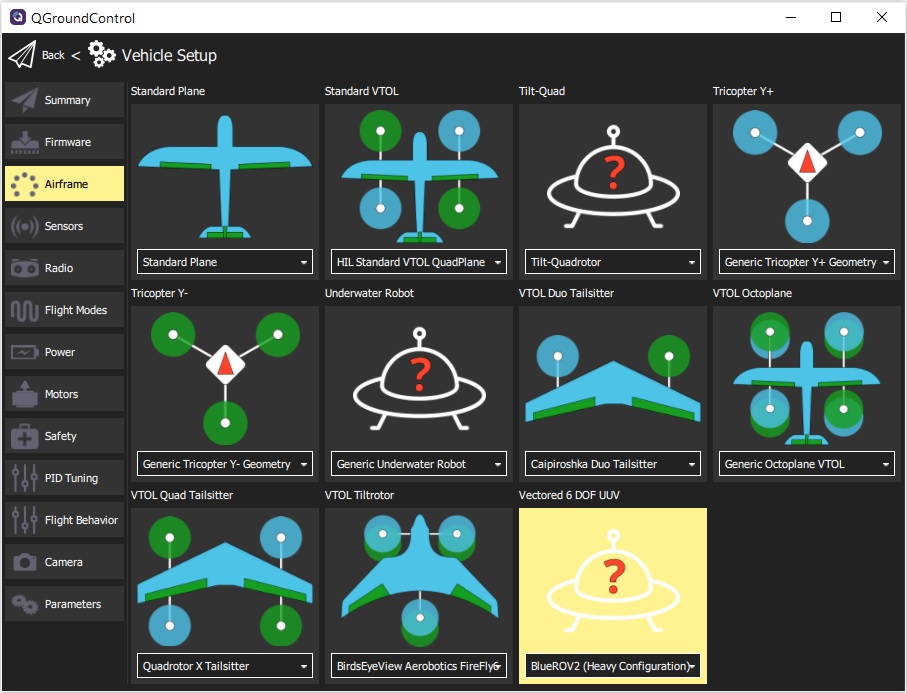
- Set the Airframe.
You will need to select the "BlueROV2 Heavy Configuration" as shown: