# Flight Log Analysis
This topic outlines approaches and software packages that can be used to analyze PX4 flight logs.
# Reporting Flights
Flight Reporting explains how to download a log and report/discuss issues about a flight with the development team.
# Structured Analysis
Before analyzing a flight log it is important to establish its context:
- If the analysis is done after a malfunction, did the log capture the crash or did it stop mid-air?
- Did all controllers track their references? The easiest way to establish this is to compare attitude roll and pitch rates to their set points.
- Does the sensor data look valid? Was there very strong vibration (a reasonable threshold for strong vibration is anything with a peak-to-peak of more than 2-3 m/s/s).
- If the root cause is not specific to the vehicle make sure to report it with a link to the log file (and video if one exists) on the PX4 issue tracker (opens new window).
# Ruling Out Power Failures
If a log file ends mid-air, two main causes are possible: a power failure or a hard fault of the operating system.
On autopilots based on the STM32 series (opens new window), hard faults of the operating system are logged to the SD card. These are located on the top level of the SD card and named fault_date.log, e.g. fault_2017_04_03_00_26_05.log. Please always check for the presence of this file if a flight log ends abruptly.
# Analysis Tools
# Flight Review (Online Tool)
Flight Review (opens new window) is the successor of Log Muncher. It is used in combination with the new ULog logging format.
Key features:
- Web based, great for end-users.
- User can upload, load and then share report with others.
- Interactive plots.

See Log Analysis using Flight Review for an introduction.
# pyulog
pyulog (opens new window) is a python package to parse ULog files, along with a set of command-line scripts to extract/display ULog information and convert them to other file formats.
Key features:
- Python library for parsing ULog files. Base library used by a number of other ULog analysis and visualisation tools.
- Scripts to extract/display ULog information:
- ulog_info: display information from an ULog file.
- ulog_messages: display logged messages from an ULog file.
- ulog_params: extract parameters from an ULog file.
- Scripts to convert ULog files to other formats:
- ulog2csv: convert ULog to (several) CSV files.
- ulog2kml: convert ULog to (several) KML files.
All scripts are installed as system-wide applications (i.e. they be called on the command line - provided Python is installed), and support the -h flag for getting usage instructions. For example:
$ ulog_info -h
usage: ulog_info [-h] [-v] file.ulg
Display information from an ULog file
positional arguments:
file.ulg ULog input file
optional arguments:
-h, --help show this help message and exit
-v, --verbose Verbose output
Below we see the kind of information exported from a sample file using ulog_info.
$ ulog_info sample.ulg
Logging start time: 0:01:52, duration: 0:01:08
Dropouts: count: 4, total duration: 0.1 s, max: 62 ms, mean: 29 ms
Info Messages:
sys_name: PX4
time_ref_utc: 0
ver_hw: AUAV_X21
ver_sw: fd483321a5cf50ead91164356d15aa474643aa73
Name (multi id, message size in bytes) number of data points, total bytes
actuator_controls_0 (0, 48) 3269 156912
actuator_outputs (0, 76) 1311 99636
commander_state (0, 9) 678 6102
control_state (0, 122) 3268 398696
cpuload (0, 16) 69 1104
ekf2_innovations (0, 140) 3271 457940
estimator_status (0, 309) 1311 405099
sensor_combined (0, 72) 17070 1229040
sensor_preflight (0, 16) 17072 273152
telemetry_status (0, 36) 70 2520
vehicle_attitude (0, 36) 6461 232596
vehicle_attitude_setpoint (0, 55) 3272 179960
vehicle_local_position (0, 123) 678 83394
vehicle_rates_setpoint (0, 24) 6448 154752
vehicle_status (0, 45) 294 13230
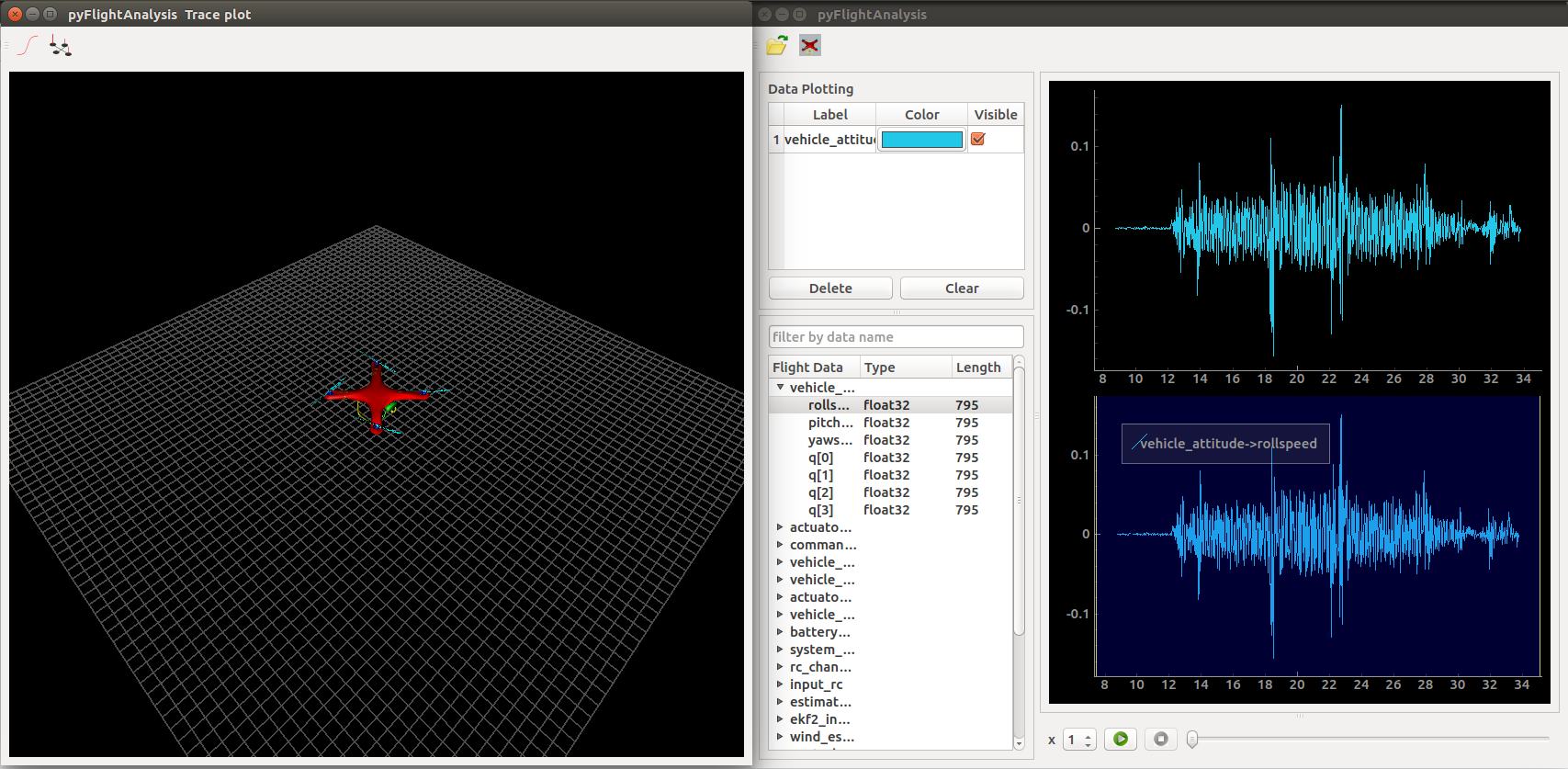
# pyFlightAnalysis
pyFlightAnalysis (opens new window) is a cross-platform PX4 flight log (ULog) visual analysis tool, inspired by FlightPlot.
Key features:
- Dynamic filter for displaying data
- 3D visualization for attitude and position of drone
- Easily replay with pyqtgraph's ROI (Region Of Interest)
- Python based, cross-platform.
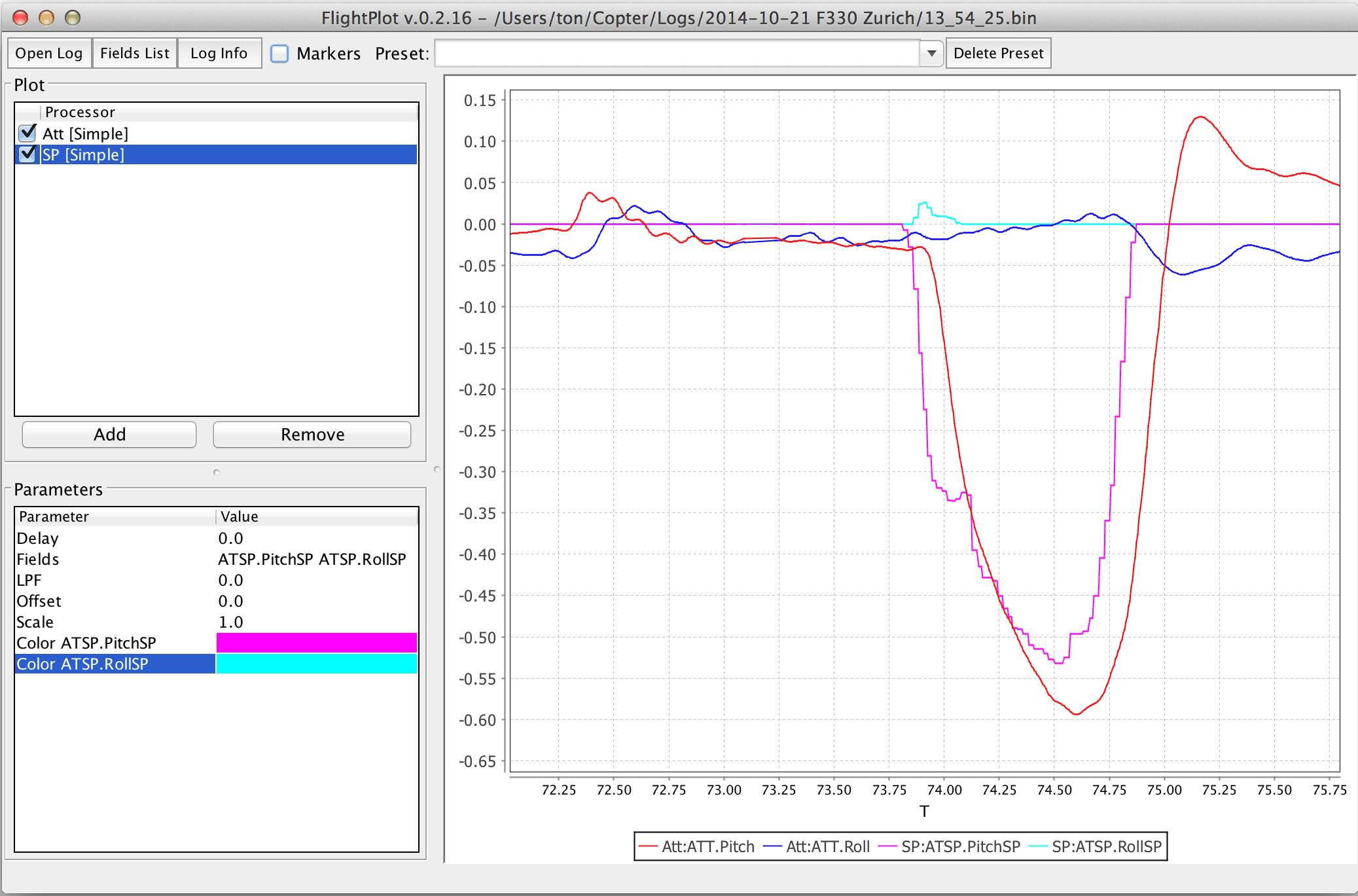
# FlightPlot
FlightPlot (opens new window) is a desktop based tool for log analysis. It can be downloaded from FlightPlot Downloads (opens new window) (Linux, MacOS, Windows).
Key features:
- Java based, cross-platform.
- Intuitive GUI, no programming knowledge required.
- Supports both new and old PX4 log formats (.ulg, .px4log, .bin)
- Allows saving plots as images.
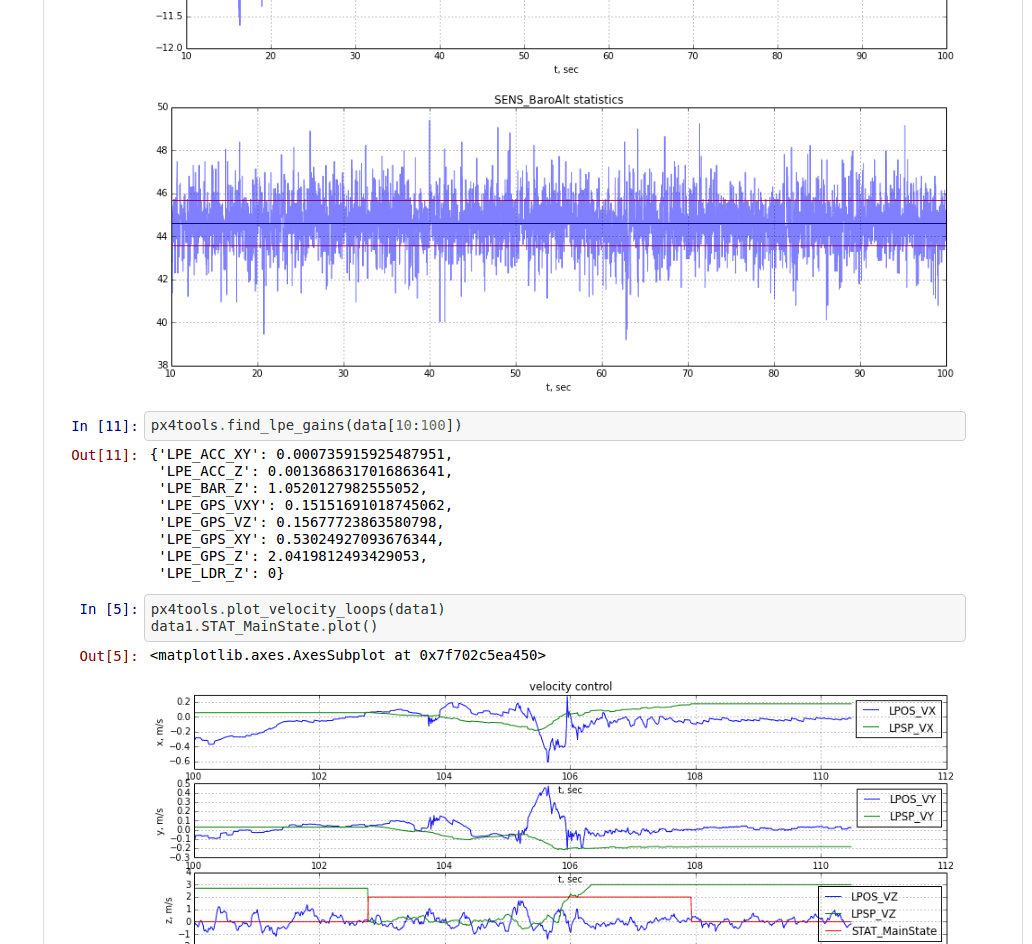
# PX4Tools
PX4Tools (opens new window) is a log analysis toolbox for the PX4 autopilot written in Python. The recommended installation procedure is to use anaconda3 (opens new window). See px4tools github page (opens new window) for details.
Key features:
- Easy to share, users can view notebooks on Github (e.g. 15-09-30 Kabir Log.ipynb (opens new window))
- Python based, cross platform, works with anaconda 2 and anaconda3
- iPython/ jupyter notebooks can be used to share analysis easily
- Advanced plotting capabilities to allow detailed analysis
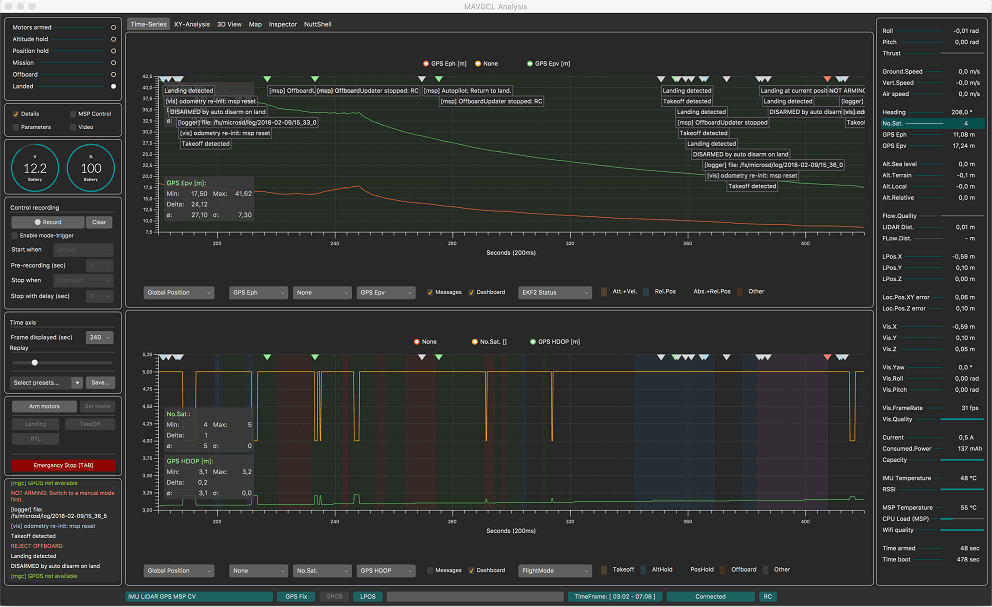
# MAVGCL
MAVGCL (opens new window) is an in-flight log analyzer for PX4. It can also be used in offline mode with downloaded uLog files.
Key features:
- Realtime data acquisition (50ms sampling, 100ms rolling display) based on MAVLink messages or ULOG data over MAVLink
- Timechart annotated by messages (MAVLink and ULog) and parameter changes (MAVLink only)
- XY Analysis for selected key-figures
- 3D View (vehicle and observer perspective)
- MAVLink inspector (reporting raw MAVLink messages)
- Offline-mode: Import of key-figures from PX4Log/ULog (file or last log from device via WiFi)
- Java based. Known to work on macOS and Ubuntu.
- And many more ...
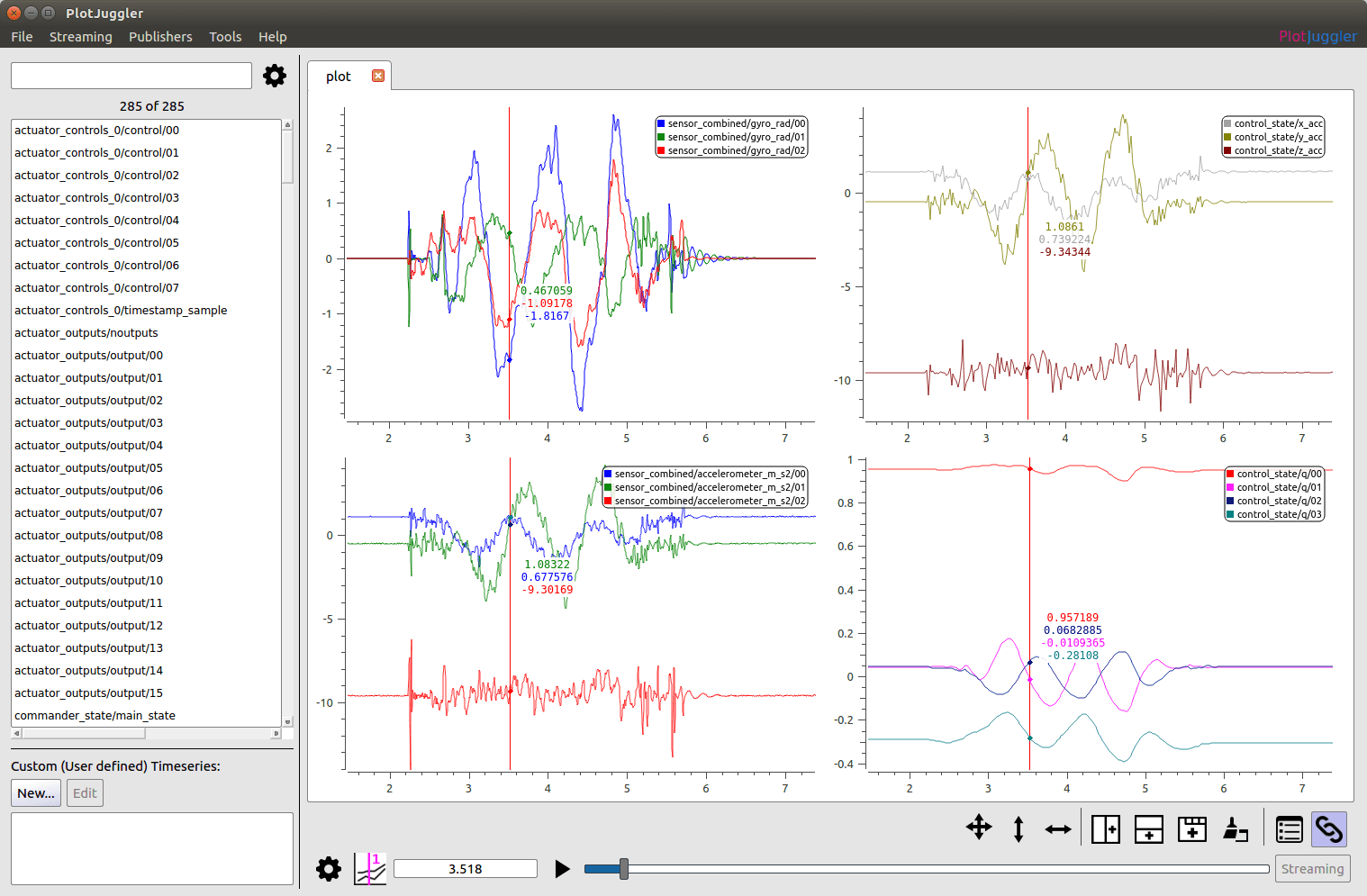
# PlotJuggler
PlotJuggler (opens new window) is a Qt5 desktop application that allows users to easily visualize and analyze data expressed in the form of time series.
It supports ULog files (.ulg) since version 2.1.4.
Key features:
- Intuitive drag&drop interface.
- Arrange your data in multiple plots, tabs or windows.
- Once you arranged your data, save it into a "Layout" file and reload it multiple times.
- Process your data inside PlotJuggler itself, using custom "data transformations".
Source code and downloads are available on Github (opens new window).
# Data Comets
Data Comets (opens new window) is a interactive PX4 flight log analysis tool that allows you to encode flight data onto the flight path, filter and brush the data by time - and much more!
You can use the online version of the tool for small log files (< 32Mb), or run it locally in order to analyze longer flights.