# Simulation
Simulators allow PX4 flight code to control a computer modeled vehicle in a simulated "world". You can interact with this vehicle just as you might with a real vehicle, using QGroundControl, an offboard API, or a radio controller/gamepad.
TIP
Simulation is a quick, easy, and most importantly, safe way to test changes to PX4 code before attempting to fly in the real world. It is also a good way to start flying with PX4 when you haven't yet got a vehicle to experiment with.
PX4 supports both Software In the Loop (SITL) simulation, where the flight stack runs on computer (either the same computer or another computer on the same network) and Hardware In the Loop (HITL) simulation using a simulation firmware on a real flight controller board.
Information about available simulators and how to set them up are provided in the next section. The other sections provide general information about how the simulator works, and are not required to use the simulators.
# Supported Simulators
The following simulators work with PX4 for HITL and/or SITL simulation.
| Simulator | Description |
|---|---|
| Gazebo | This simulator is highly recommended. A powerful 3D simulation environment that is particularly suitable for testing object-avoidance and computer vision. It can also be used for multi-vehicle simulation and is commonly used with ROS, a collection of tools for automating vehicle control. Supported Vehicles: Quad (Iris and Solo, Hex (Typhoon H480), Generic quad delta VTOL, Tailsitter, Plane, Rover, Submarine |
| FlightGear | A simulator that provides physically and visually realistic simulations. In particular it can simulate many weather conditions, including thunderstorms, snow, rain and hail, and can also simulate thermals and different types of atmospheric flows. Multi-vehicle simulation is also supported. Supported Vehicles: Plane, Autogyro, Rover |
| JSBSim | A simulator that provides advanced flight dynamics models. This can be used to model realistic flight dynamics based on wind tunnel data. Supported Vehicles: Plane, Quad, Hex |
| jMAVSim | A simple multirotor simulator that allows you to fly copter type vehicles around a simulated world. It is easy to set up and can be used to test that your vehicle can take off, fly, land, and responds appropriately to various fail conditions (e.g. GPS failure). It can also be used for multi-vehicle simulation. Supported Vehicles: Quad |
| AirSim | A cross platform simulator that provides physically and visually realistic simulations. This simulator is resource intensive, and requires a very significantly more powerful computer than the other simulators described here. Supported Vehicles: Iris (MultiRotor model and a configuration for PX4 QuadRotor in the X configuration). |
| Simulation-In-Hardware (SIH) | An alternative to HITL that offers a hard real-time simulation directly on the hardware autopilot. This simulator is implemented in C++ as a PX4 module directly in the Firmware code (opens new window). Supported Vehicles: Plane, Quad, Tailsitter |
| Ignition Gazebo | Ignition Gazebo is derived from the popular robotics simulator Gazebo, featuring more advanced rendering, physics and sensor models. Supported Vehicles: Quad |
Instructions for how to setup and use the simulators are in the topics linked above.
The remainder of this topic is a "somewhat generic" description of how the simulation infrastructure works. It is not required to use the simulators.
# Simulator MAVLink API
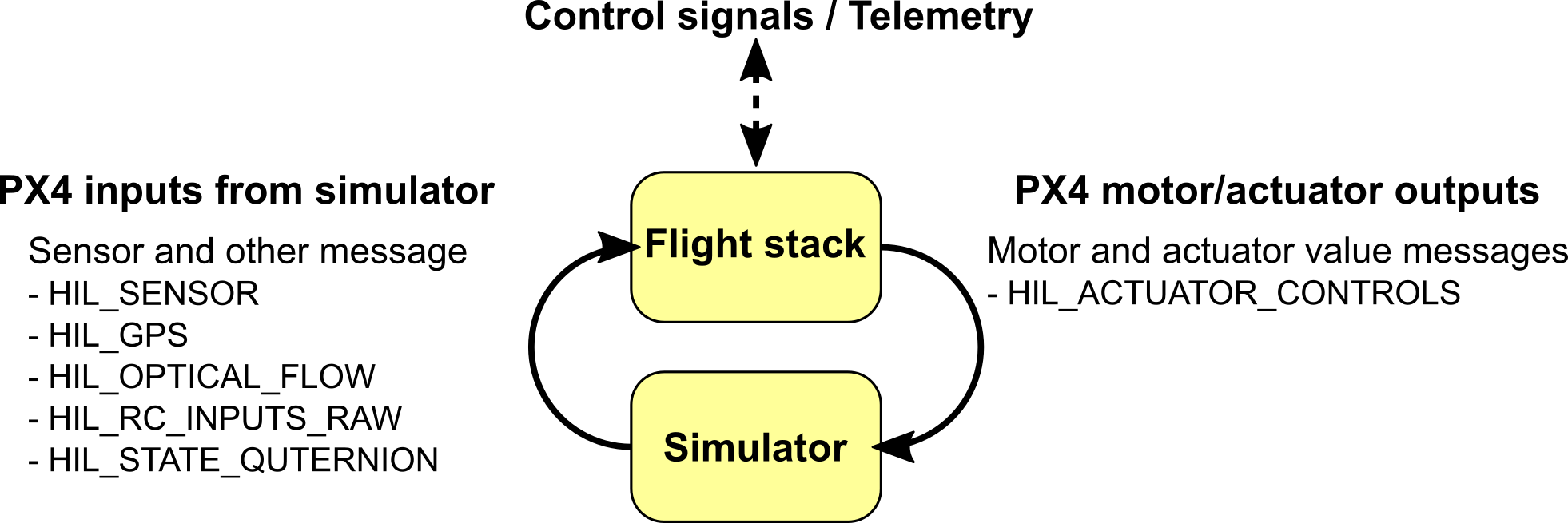
All simulators communicate with PX4 using the Simulator MAVLink API. This API defines a set of MAVLink messages that supply sensor data from the simulated world to PX4 and return motor and actuator values from the flight code that will be applied to the simulated vehicle. The image below shows the message flow.
Note
A SITL build of PX4 uses simulator_mavlink.cpp (opens new window) to handle these messages while a hardware build in HIL mode uses mavlink_receiver.cpp (opens new window). Sensor data from the simulator is written to PX4 uORB topics. All motors / actuators are blocked, but internal software is fully operational.
The messages are described below (see links for specific detail).
| Message | Direction | Description |
|---|---|---|
| MAV_MODE:MAV_MODE_FLAG_HIL_ENABLED (opens new window) | NA | Mode flag when using simulation. All motors/actuators are blocked, but internal software is fully operational. |
| HIL_ACTUATOR_CONTROLS (opens new window) | PX4 to Sim | PX4 control outputs (to motors, actuators). |
| HIL_SENSOR (opens new window) | Sim to PX4 | Simulated IMU readings in SI units in NED body frame. |
| HIL_GPS (opens new window) | Sim to PX4 | The simulated GPS RAW sensor value. |
| HIL_OPTICAL_FLOW (opens new window) | Sim to PX4 | Simulated optical flow from a flow sensor (e.g. PX4FLOW or optical mouse sensor) |
| HIL_STATE_QUATERNION (opens new window) | Sim to PX4 | Contains the actual "simulated" vehicle position, attitude, speed etc. This can be logged and compared to PX4's estimates for analysis and debugging (for example, checking how well an estimator works for noisy (simulated) sensor inputs). |
| HIL_RC_INPUTS_RAW (opens new window) | Sim to PX4 | The RAW values of the RC channels received. |
# Default PX4 MAVLink UDP Ports
By default, PX4 uses commonly established UDP ports for MAVLink communication with ground control stations (e.g. QGroundControl), Offboard APIs (e.g. MAVSDK, MAVROS) and simulator APIs (e.g. Gazebo). These ports are:
- PX4's remote UDP Port 14550 is used for communication with ground control stations. GCS are expected to listen for connections on this port. QGroundControl listens to this port by default.
- PX4's remote UDP Port 14540 is used for communication with offboard APIs.
Offboard APIs are expected to listen for connections on this port.
Note
Multi-vehicle simulations use a separate remote port for each instance, allocated sequentially from
14540to14549(additional instances all use port14549). - The simulator's local TCP Port, 4560, is used for communication with PX4. The simulator listens to this port, and PX4 initiates a TCP connection to it.
Note
The ports for the GCS, offboard APIs and simulator are specified by startup scripts. See System Startup to learn more.
# SITL Simulation Environment
The diagram below shows a typical SITL simulation environment for any of the supported simulators.

The different parts of the system connect via UDP, and can be run on either the same computer or another computer on the same network.
- PX4 uses a simulation-specific module to connect to the simulator's local TCP port 4560.
Simulators then exchange information with PX4 using the Simulator MAVLink API described above.
PX4 on SITL and the simulator can run on either the same computer or different computers on the same network.
Note
Simulators can also use the microRTPS bridge (PX4-FastRTPS Bridge) to directly interact with PX4 (i.e. via UORB topics rather than MAVLink). This approach may used by Gazebo multi-vehicle simulation.
- PX4 uses the normal MAVLink module to connect to ground stations and external developer APIs like MAVSDK or ROS
- Ground stations listen to PX4's remote UDP port:
14550 - External developer APIs listen to PX4's remote UDP port:
14540. For multi-vehicle simulations, PX4 sequentially allocates a separate remote port for each instance from14540to14549(additional instances all use port14549).
- Ground stations listen to PX4's remote UDP port:
- PX4 defines a number of local UDP ports (
14580,18570), which are sometimes used when networking with PX4 running in a container or virtual machine. These are not recommended for "general" use and may change in future. - A serial connection may be used to connect Joystick/Gamepad hardware via QGroundControl.
If you use the normal build system SITL make configuration targets (see next section) then both SITL and the Simulator will be launched on the same computer and the ports above will automatically be configured.
You can configure additional MAVLink UDP connections and otherwise modify the simulation environment in the build configuration and initialisation files.
# Starting/Building SITL Simulation
The build system makes it very easy to build and start PX4 on SITL, launch a simulator, and connect them. The syntax (simplified) looks like this:
make px4_sitl simulator[_vehicle-model]
where simulator is gazebo, jmavsim or some other simulator, and vehicle-model is a particular vehicle type supported by that simulator (jMAVSim only supports multicopters, while Gazebo supports many different types).
A number of examples are shown below, and there are many more in the individual pages for each of the simulators:
# Start Gazebo with plane
make px4_sitl gazebo_plane
# Start Gazebo with iris and optical flow
make px4_sitl gazebo_iris_opt_flow
# Start JMavSim with iris (default vehicle model)
make px4_sitl jmavsim
# Start PX4 with no simulator (i.e. to use your own "custom" simulator)
make px4_sitl none_iris
The simulation can be further configured via environment variables:
PX4_ESTIMATOR: This variable configures which estimator to use. Possible options are:ekf2(default),lpe(deprecated). It can be set viaexport PX4_ESTIMATOR=lpebefore running the simulation.
The syntax described here is simplified, and there are many other options that you can configure via make - for example, to set that you wish to connect to an IDE or debugger. For more information see: Building the Code > PX4 Make Build Targets.
# Run Simulation Faster than Realtime
SITL can be run faster or slower than realtime when using jMAVSim or Gazebo.
The speed factor is set using the environment variable PX4_SIM_SPEED_FACTOR.
For example, to run the jMAVSim simulation at 2 times the real time speed:
PX4_SIM_SPEED_FACTOR=2 make px4_sitl jmavsim
To run at half real-time:
PX4_SIM_SPEED_FACTOR=0.5 make px4_sitl jmavsim
You can apply the factor to all SITL runs in the current session using EXPORT:
export PX4_SIM_SPEED_FACTOR=2
make px4_sitl jmavsim
Note
At some point IO or CPU will limit the speed that is possible on your machine and it will be slowed down "automatically". Powerful desktop machines can usually run the simulation at around 6-10x, for notebooks the achieved rates can be around 3-4x.
Note
To avoid PX4 detecting data link timeouts, increase the value of param COM_DL_LOSS_T proportional to the simulation rate.
For example, if COM_DL_LOSS_T is 10 in realtime, at 10x simulation rate increase to 100.
# Lockstep Simulation
PX4 SITL and the simulators (jMAVSim or Gazebo) have been set up to run in lockstep. What this means is that PX4 and the simulator wait on each other for sensor and actuator messages, rather than running at their own speeds.
Note
Lockstep makes it possible to run the simulation faster or slower than realtime, and also to pause it in order to step through code.
The sequence of steps for lockstep are:
- The simulation sends a sensor message HIL_SENSOR (opens new window) including a timestamp
time_usecto update the sensor state and time of PX4. - PX4 receives this and does one iteration of state estimation, controls, etc. and eventually sends an actuator message HIL_ACTUATOR_CONTROLS (opens new window).
- The simulation waits until it receives the actuator/motor message, then simulates the physics and calculates the next sensor message to send to PX4 again.
The system starts with a "freewheeling" period where the simulation sends sensor messages including time and therefore runs PX4 until it has initialized and responds with an actuator message.
# Disable Lockstep Simulation
The lockstep simulation can be disabled if, for example, SITL is to be used with a simulator that does not support this feature. In this case the simulator and PX4 use the host system time and do not wait on each other.
To disable lockstep in PX4, run make px4_sitl_default boardconfig and set the BOARD_NOLOCKSTEP "Force disable lockstep" symbol which is located under toolchain.
To disable lockstep in Gazebo, edit the model SDF file (opens new window) and set <enable_lockstep>false</enable_lockstep>.
To disable lockstep in jMAVSim, remove -l in jmavsim_run.sh (opens new window), or make sure otherwise that the java binary is started without the -lockstep flag.
# Startup Scripts
Scripts are used to control which parameter settings to use or which modules to start.
They are located in the ROMFS/px4fmu_common/init.d-posix (opens new window) directory, the rcS file is the main entry point.
See System Startup for more information.
# Simulating Failsafes and Sensor/Hardware Failure
Simulate Failsafes explains how to trigger safety failsafes like GPS failure and battery drain.
# HITL Simulation Environment
With Hardware-in-the-Loop (HITL) simulation the normal PX4 firmware is run on real hardware. The HITL Simulation Environment in documented in: HITL Simulation.
# Joystick/Gamepad Integration
QGroundControl desktop versions can connect to a USB Joystick/Gamepad and send its movement commands and button presses to PX4 over MAVLink. This works on both SITL and HITL simulations, and allows you to directly control the simulated vehicle. If you don't have a joystick you can alternatively control the vehicle using QGroundControl's onscreen virtual thumbsticks.
For setup information see the QGroundControl User Guide:
# Camera Simulation
PX4 supports capture of both still images and video from within the Gazebo simulated environment. This can be enabled/set up as described in Gazebo > Video Streaming.
The simulated camera is a gazebo plugin that implements the MAVLink Camera Protocol (opens new window). PX4 connects/integrates with this camera in exactly the same way as it would with any other MAVLink camera:
TRIG_INTERFACE must be set to
3to configure the camera trigger driver for use with a MAVLink cameraTIP
In this mode the driver just sends a CAMERA_TRIGGER (opens new window) message whenever an image capture is requested. For more information see Camera.
PX4 must forward all camera commands between the GCS and the (simulator) MAVLink Camera. You can do this by starting MAVLink with the
-fflag as shown, specifying the UDP ports for the new connection.mavlink start -u 14558 -o 14530 -r 4000 -f -m cameraNote
More than just the camera MAVLink messages will be forwarded, but the camera will ignore those that it doesn't consider relevant.
The same approach can be used by other simulators to implement camera support.
# Running Simulation on a Remote Server
It is possible to run the simulator on one computer, and access it from another computer on the same network (or on another network with appropriate routing). This might be useful, for example, if you want to test a drone application running on real companion computer hardware running against a simulated vehicle.
This does not work "out of the box" because PX4 does not route packets to external interfaces by default (in order to avoid spamming the network and different simulations interfering with each other). Instead it routes traffic internally - to "localhost".
There are a number of ways to make the UDP packets available on external interfaces, as outlined below.
# Use MAVLink Router
The mavlink-router (opens new window) can be used to route packets from localhost to an external interface.
To route packets between SITL running on one computer (sending MAVLink traffic to localhost on UDP port 14550), and QGC running on another computer (e.g. at address 10.73.41.30) you could:
- Start mavlink-router with the following command:
mavlink-routerd -e 10.73.41.30:14550 127.0.0.1:14550 - Use a mavlink-router conf file.
[UdpEndpoint QGC] Mode = Normal Address = 10.73.41.30 Port = 14550 [UdpEndpoint SIM] Mode = Eavesdropping Address = 127.0.0.1 Port = 14550
Note
More information about mavlink-router configuration can be found here (opens new window).
# Enable UDP Broadcasting
The mavlink module routes to localhost by default, but you can enable UDP broadcasting of heartbeats using its -p option.
Any remote computer on the network can then connect to the simulator by listening to the appropriate port (i.e. 14550 for QGroundControl).
Note
UDP broadcasting provides a simple way to set up the connection when there is only one simulation running on the network. Do not use this approach if there are multiple simulations running on the network (you might instead publish to a specific address).
This should be done in an appropriate configuration file where mavlink start is called.
For example: /ROMFS/px4fmu_common/init.d-posix/rcS (opens new window).
# Enable Streaming to Specific Address
The mavlink module routes to localhost by default, but you can specify an external IP address to stream to using its -t option.
The specified remote computer can then connect to the simulator by listening to the appropriate port (i.e. 14550 for QGroundControl).
This should be done in various configuration files where mavlink start is called.
For example: /ROMFS/px4fmu_common/init.d-posix/rcS (opens new window).
# SSH Tunneling
SSH tunneling is a flexible option because the simulation computer and the system using it need not be on the same network.
Note
You might similarly use VPN to provide a tunnel to an external interface (on the same network or another network).
One way to create the tunnel is to use SSH tunneling options.
The tunnel itself can be created by running the following command on localhost, where remote.local is the name of a remote computer:
ssh -C -fR 14551:localhost:14551 remote.local
The UDP packets need to be translated to TCP packets so they can be routed over SSH. The netcat (opens new window) utility can be used on both sides of the tunnel - first to convert packets from UDP to TCP, and then back to UDP at the other end.
TIP
QGC must be running before executing netcat.
On the QGroundControl computer, UDP packet translation may be implemented by running following commands:
mkfifo /tmp/tcp2udp
netcat -lvp 14551 < /tmp/tcp2udp | netcat -u localhost 14550 > /tmp/tcp2udp
On the simulator side of the SSH tunnel, the command is:
mkfifo /tmp/udp2tcp
netcat -lvup 14550 < /tmp/udp2tcp | netcat localhost 14551 > /tmp/udp2tcp
The port number 14550 is valid for connecting to QGroundControl or another GCS, but should be adjusted for other endpoints (e.g. developer APIs etc.).
The tunnel may in theory run indefinitely, but netcat connections may need to be restarted if there is a problem.
The QGC_remote_connect.bash (opens new window) script can be run on the QGC computer to automatically setup/run the above instructions. The simulation must already be running on the remote server, and you must be able to SSH into that server.