# 飞行入门课
本主题介绍了在手动或自动驾驶辅助飞行模式下使用遥控器操控机体的基础知识(有关自主飞行,请参阅:任务)。
注解
在您第一次飞行之前,您应该阅读我们的首次飞行指南。 :::
# 解锁机体
Before you can fly the vehicle it must first be armed. 这将为所有电机和驱动器供电;在多轴飞行器上,它将启动螺旋桨转动。
解锁无人机
- First disengage the safety switch.
- 对您的机体使用解锁命令 - 将油门杆放在右下角。
- Alternatively configure an arm/disarm switch.
- You can also arm in QGroundControl (PX4 does not require a radio control for flying autonomously).
提示
机体在校准/配置完成且位置固定之前无法解锁。 Vehicle Status Notifications (including on-vehicle LEDs, audio notifications and QGroundControl updates) can tell you when the vehicle is ready to fly (and help you work out the cause when it is not ready to fly). :::
注解
如果您解锁后过长时间没有起飞,机体将( 默认情况下)自动加锁(关闭电机)! 这是一种安全措施,可确保机体在没有被使用时恢复到安全状态。 :::
VTOL机型只能在多轴模式下解锁(默认-可以使用[CBRK_VTOLARMING](../advanced_config/parameter_reference.md#CBRK_VTOLARMING) 启用固定翼飞机模式下解锁)。 :::
# 起飞
最简单的起飞方式(在机体解锁后)是使用自动 起飞模式。 通常可以通过 遥控器拨杆开关 或地面站触发的。
Multicopter (and VTOL in multicopter mode) pilots can take off manually by enabling position mode, arming the vehicle, and then raising the throttle stick above 62.5%. 高于此值,所有控制器都被启用,无人机将输出悬停所需的油门值(MPC_THR_HOVER)。
提示
强烈推荐自动起飞模式,尤其是固定翼机体!
注解
如果机体在解锁后过长时间没有起飞,无人机将会加锁(使用COM_DISARM_PRFLT调整超时时间)。 :::
注解
The Failure Detector will automatically stop the engines if there is a problem on takeoff. :::
# 降落
对于多轴飞行器(和多轴模式下的 VTOL),飞手可以通过向下推油门杆手动降落,直到机体降落加锁。
请注意,默认情况下,机体在降落后会自动加锁:
- 通过COM_DISARM_LAND来设置降落后自动加锁的时间(或完全禁用它)。
- 通过将油门杆放在左下角手动加锁。
注解
如果您在降落期间看到车辆“抽搐” (电机不停的在关闭打开状态快速切换) 这可能是由于 降落检测器配置不当(特别是MPC_THR_HOVER设置不当)造成的。 :::
提示
强烈建议自动降落,尤其是固定翼机体。
# 飞行控制/命令
所有飞行,包括起飞和降落,都使用 4 个基本命令进行控制:横滚、偏航、俯仰和油门。
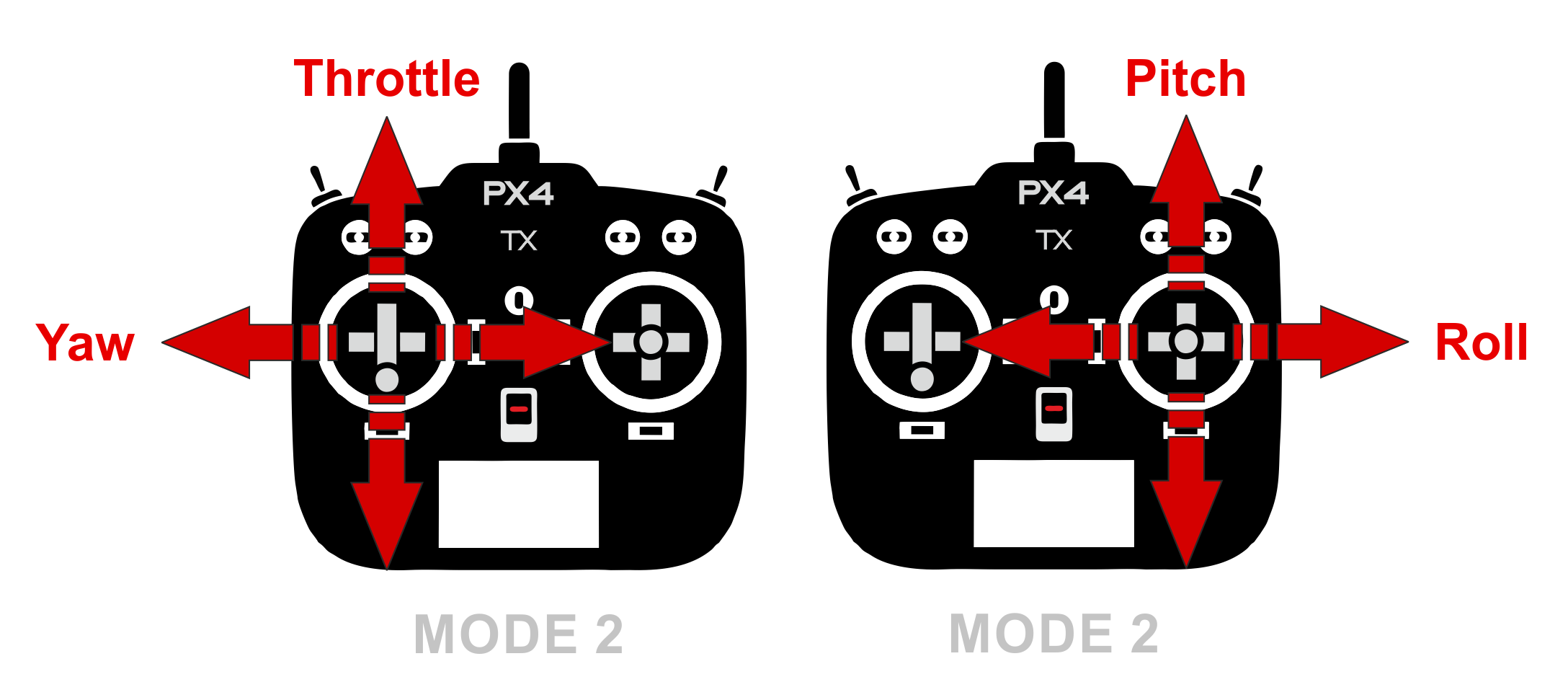
为了控制您的飞机,您需要了解基本的横滚、偏航、俯仰和油门命令如何影响三维空间中的运动。 这取决于您是控制像固定翼一样向前飞行的飞机,还是像多轴这样的“悬停飞机”。
# 悬停飞机
悬停飞行器(直升机,在VTOL悬停模式)到动作命令响应如下所示:
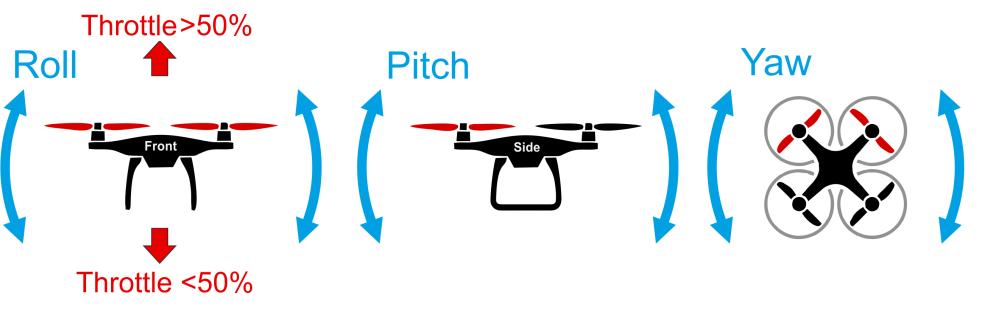
- Pitch => Forward/back.
- Roll => Left/right.
- Yaw => Left/right rotation around the centre of the frame.
- Throttle => Changed altitude/speed.
# 前飞飞机
向前飞行的飞机(固定翼、固定翼模式的VTOL)对动作命令作出如下反应:
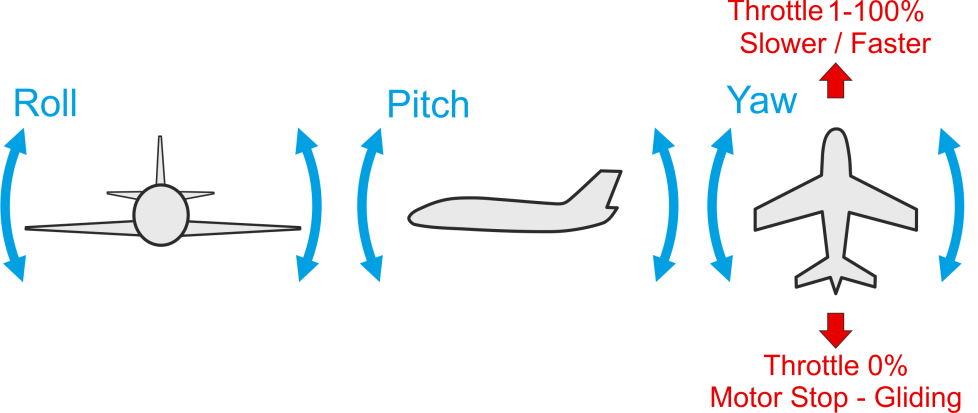
- Pitch => Up/down.
- Roll => Left/right and a turn.
- Yaw => Left/right tail rotation and turn.
- Throttle => Changed forward speed.
注解
对于飞机的最佳转弯又称为协调转弯,需同时操作滚动和少量偏航。 这个动作需要一定的经验!
# 辅助飞行
即是了解了机体是如何控制的,全手动模式的飞行也是棘手的。 新用户应该 配置他们的遥控器 来使用飞行模式,在这种模式下自动驾驶仪自动补偿不稳定的用户输入或环境因素。
强烈建议新手使用以下三种模式:
- 姿态模式-机体很难侧翻,并且如果摇杆被释放飞行器将趋于平稳(但不保持位置)。
- 高度模式 - 爬升和下降由一个最大速率来控制。
- 位置模式 - 当摇杆被释放机体将保持飞行(位置定点,不会随风漂移)。
注解
You can also access automatic modes through the buttons on the bottom of the QGroundControl main flight screen. :::