# E-Flite Convergence 倾转旋翼 (Pixfalcon)
The E-Flite Convergence (opens new window) can easily be converted to a fully autonomous VTOL with PX4. There is not much space but it's enough for a Pixfalcon flight controller with GPS and telemetry.
注解
The original Horizon Hobby E-Flite Convergence (opens new window) frame and Pixfalcon have been discontinued. Alternatives are provided in the Purchase section.
# Purchase
Vehicle frame options:
- WL Tech XK X450 - Banggood (opens new window), AliExpress (opens new window)
- JJRC M02 - Banggood (AU) (opens new window), AliExpress (opens new window)
Flight controller options ():
- Pixhawk 4 Mini
- Holybro Pixhawk Mini.
- Any other compatible flight controller with small enough form-factor.
# Hardware Setup
The vehicle needs 7 PWM signals, which must be connected to the flight controller outputs as specified in Airframe Reference > VTOL Tiltrotor > E-flite Convergence. This mapping is reproduced below.
| Port | 接口定义 |
|---|---|
| MAIN 1 | 右电机 |
| MAIN 2 | 左电机 |
| MAIN 3 | 尾电机 |
| MAIN 4 | 空 |
| MAIN 5 | 右倾转舵机 |
| MAIN 6 | 左倾转舵机 |
| MAIN 7 | 右翼升降舵 |
| MAIN 8 | 左翼升降舵 |
Note that left and right in the reference are defined from the perspective of a human pilot inside a real plane (or looking from above, as shown below):

# Flight Controller
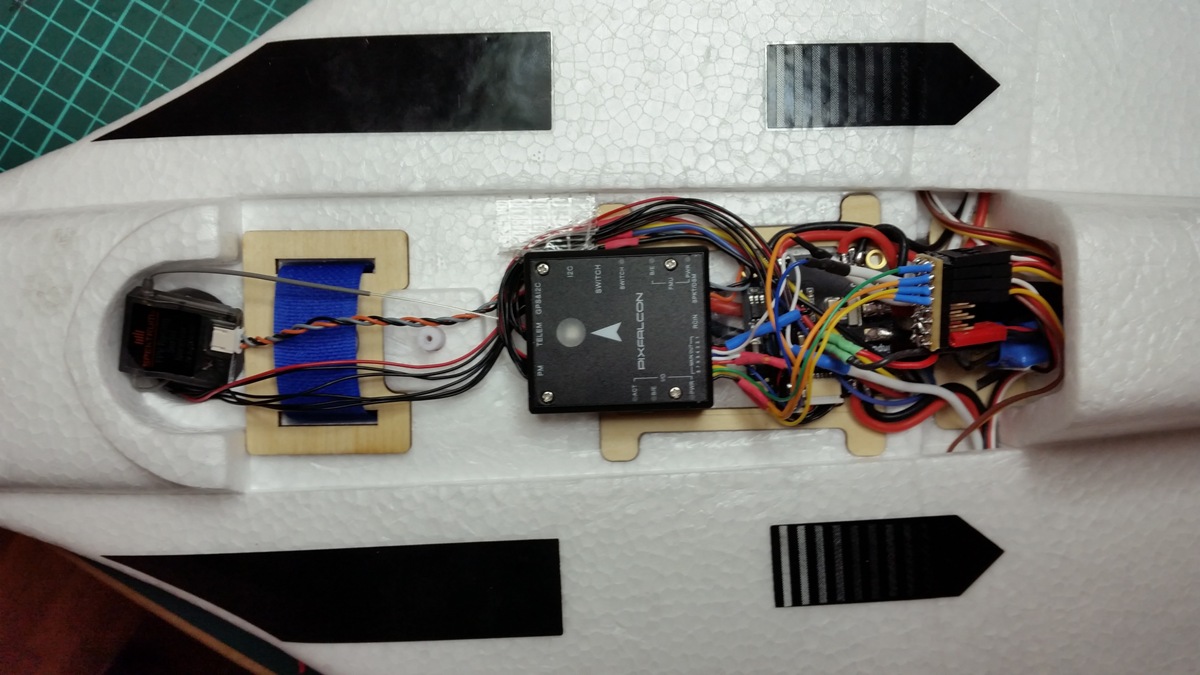
The flight controller can be mounted at the same place the original autopilot was.
# Telemetry Radio
The telemetry module fits into the bay meant to hold FPV transmission gear.
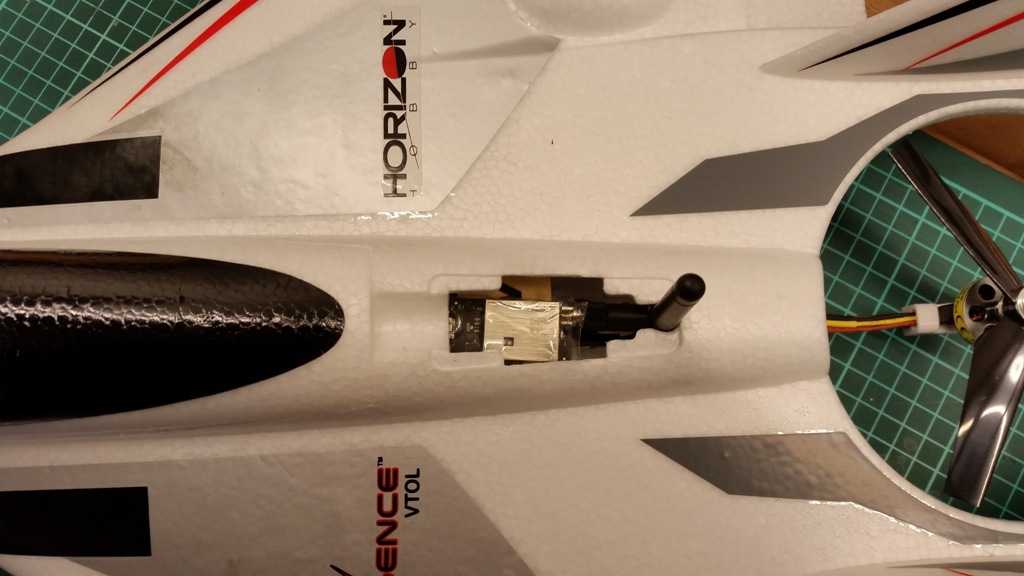
# GPS
For the GPS we cut out a section of foam inside the "cockpit". That way the GPS can be put inside the body and is nicely stowed away without compromising the vehicle appearance.

# PX4 Configuration
Follow the Standard Configuration in QGroundControl (radio, sensors, flight modes, etc.).
The particular settings that are relevant to this vehicle are:
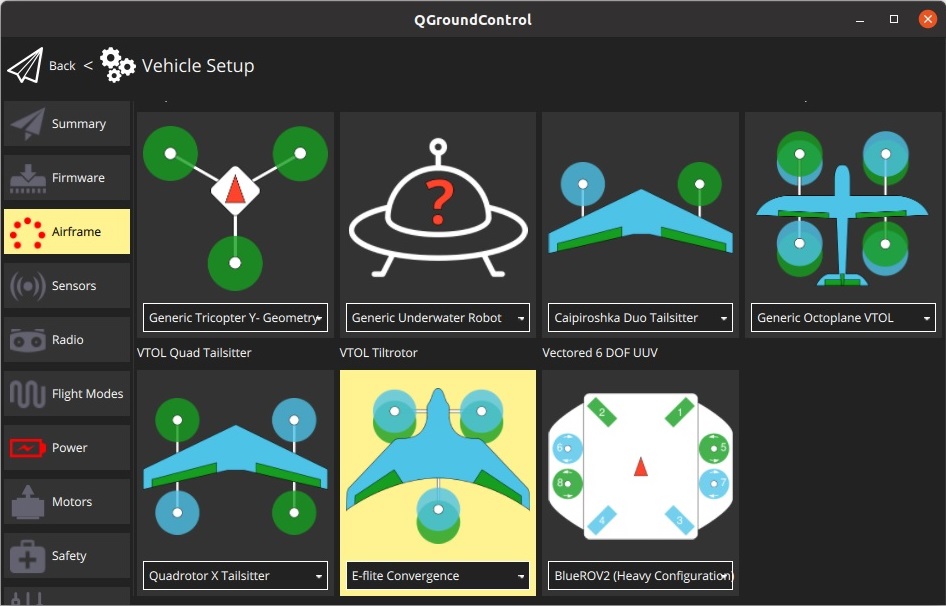
- Airframe
- Select the airframe configuration E-flite Convergence under VTOL Tiltrotor and restart QGroundControl.
- Select the airframe configuration E-flite Convergence under VTOL Tiltrotor and restart QGroundControl.
- Flight Modes/Switches
- As this is a VTOL vehicle, you must assign an RC controller switch for transitioning between multicopter and fixed-wing modes.