# E-flite Convergence 틸트로터 VTOL (Pixfalcon)
E-Flite 컨버전스 (opens new window) PX4의 자율 비행이 가능한 VTOL로 변환할 수 있습니다. 공간은 충분하지 않지만, GPS, 텔레메트리를 장착하기에는 Pixfalcon 비행 콘트롤러의 공간은 충분합니다.
Note
오리지널 Horizon Hobby E-Flite Convergence (opens new window) 프레임과 Pixfalcon은 단종되었습니다. 대안은 구매 섹션을 참고하십시오.
# 구매
차량 프레임 옵션:
- WL Tech XK X450 - 뱅굿 (opens new window), 알리익스프레스 (opens new window)
- JJRC M02 - 뱅굿(AU) (opens new window), 알리익스프레스 (opens new window)
비행 컨트롤러 옵션():
- 픽스호크 4 미니
- 홀리브로 픽스호크 미니.
- 충분히 작은 폼 팩터를 가진 다른 호환 가능한 비행 콘트롤러.
# 하드웨어 설정
차량에는 기체 정의서 > VTOL 틸트로터 > E-flite Convergence에 지정된 대로 비행 콘트롤러 출력에 연결되어야 하는 7개의 PWM 신호가 필요합니다. 출력 매핑은 아래와 같습니다.
| 포트 | 연결 |
|---|---|
| MAIN 1 | 우측 모터 |
| MAIN 2 | 좌측 모터 |
| MAIN 3 | 후면 모터 |
| MAIN 4 | 없음 |
| MAIN 5 | 우측 틸트 서보 |
| MAIN 6 | 좌측 틸트 서보 |
| MAIN 7 | 우측 엘레본 |
| MAIN 8 | 좌측 엘레본 |
참조에서 왼쪽과 오른쪽은 실제 비행기 내부의 인간 조종사의 관점에서 정의됩니다(또는 아래 표시된 것처럼 위에서 볼 때).

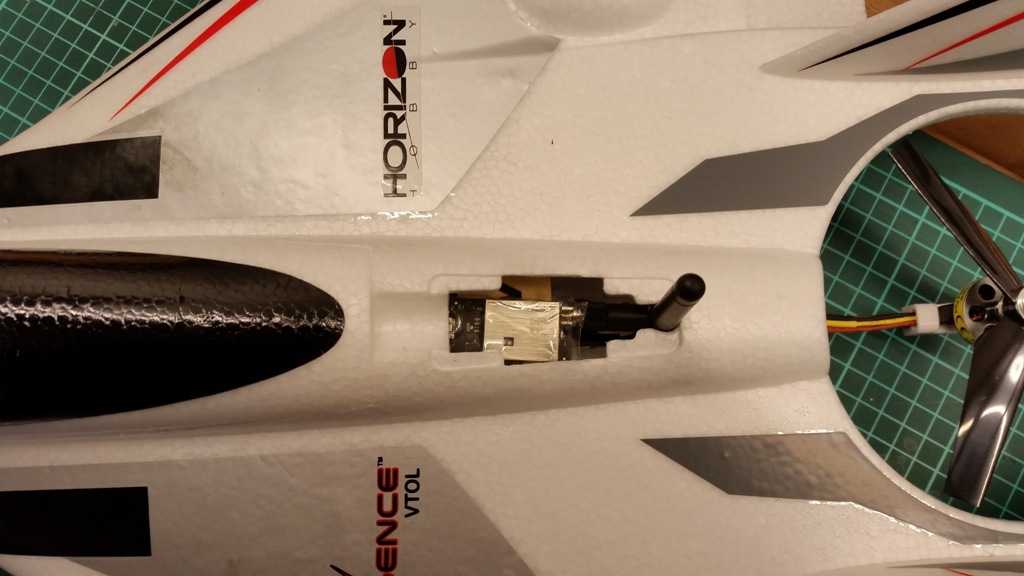
# 비행 콘트롤러
비행 콘트롤러는 원래 자동조종장치가 있던 동일한 위치에 장착할 수 있습니다.
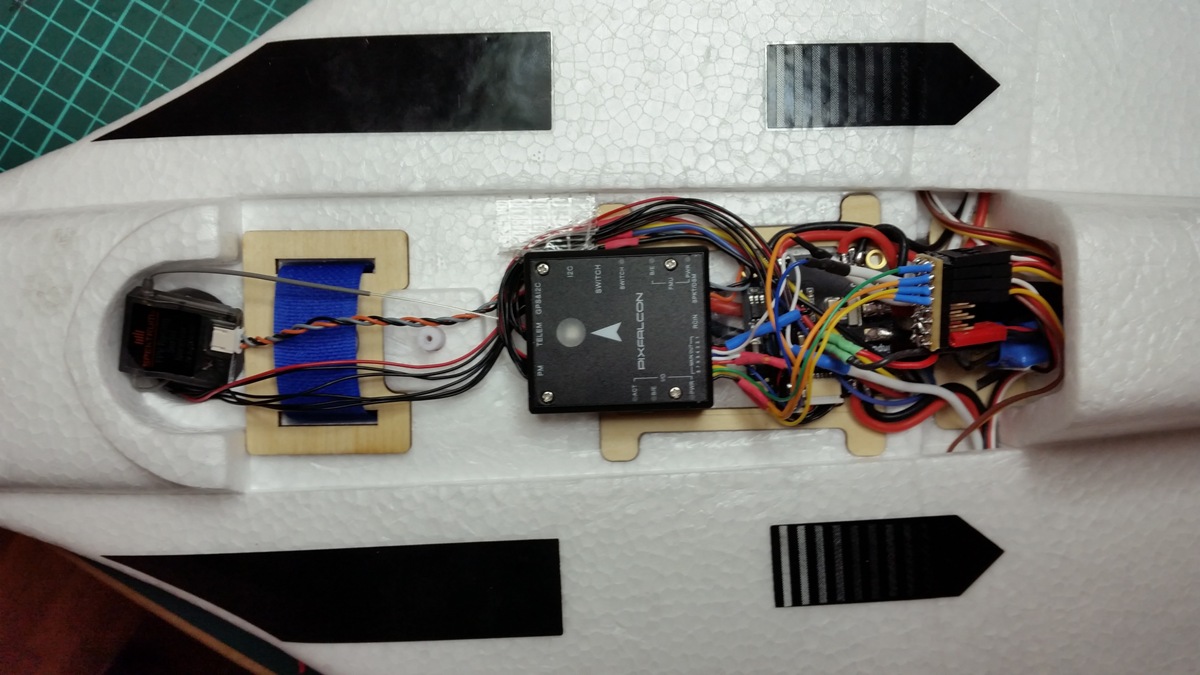
# 텔레메트리
텔레메트리 모듈은 FPV 전송 기어를 고정하기 위한 베이에 장착합니다.
# GPS
GPS 장착을 위하여 "조종실" 내부의 발포 재질 부분을 잘라냈습니다. 그렇게 하면 GPS를 차체 내부에 넣을 수 있고, 차량 외관을 손상시키지 않으면서 멋지게 수납할 수 있습니다.

# PX4 설정
Follow the Standard Configuration in QGroundControl (radio, sensors, flight modes, etc.).
이 기체와 관련된 특정 설정은 다음과 같습니다.
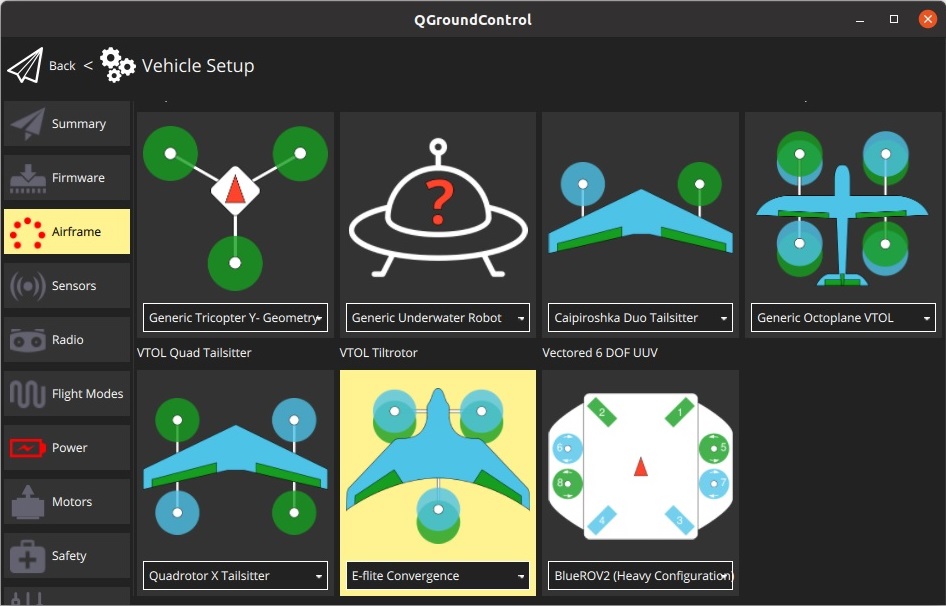
- 기체
- VTOL Tiltrotor에서 기체 구성 E-flite Convergence를 선택하고 QGroundControl을 다시 시작합니다.
- VTOL Tiltrotor에서 기체 구성 E-flite Convergence를 선택하고 QGroundControl을 다시 시작합니다.
- 비행 모드/스위치
- VTOL은 멀티콥터와 고정익을 전환하려면 RC 컨트롤러 스위치를 할당하여야 합니다.