# Hardware in the Loop Simulation (HITL)
Hardware-in-the-Loop (HITL or HIL) is a simulation mode in which normal PX4 firmware is run on real flight controller hardware. This approach has the benefit of testing most of the actual flight code on the real hardware.
PX4 supports HITL for multicopters (using jMAVSim or Gazebo Classic) and VTOL (using Gazebo Classic).
# HITL-Compatible Airframes
The current set of compatible airframes vs Simulators is:
| Airframe | SYS_AUTOSTART | Gazebo Classic | jMAVSim |
|---|---|---|---|
| HIL Quadcopter X | 1001 | Y | Y |
| HIL Standard VTOL QuadPlane | 1002 | Y | |
| Generic Quadrotor x copter | 4001 | Y | Y |
# HITL Simulation Environment
With Hardware-in-the-Loop (HITL) simulation the normal PX4 firmware is run on real hardware. JMAVSim or Gazebo Classic (running on a development computer) are connected to the flight controller hardware via USB/UART. The simulator acts as gateway to share MAVLink data between PX4 and QGroundControl.
Note
The simulator can also be connected via UDP if the flight controller has networking support and uses a stable, low-latency connection (e.g. a wired Ethernet connection - WiFi is usually not sufficiently reliable). For example, this configuration has been tested with PX4 running on a Raspberry Pi connected via Ethernet to the computer (a startup configuration that includes the command for running jMAVSim can be found here (opens new window)).
The diagram below shows the simulation environment:
- A HITL configuration is selected (via QGroundControl) that doesn't start any real sensors.
- jMAVSim or Gazebo Classic are connected to the flight controller via USB.
- The simulator is connected to QGroundControl via UDP and bridges its MAVLink messages to PX4.
- Gazebo Classic and jMAVSim can also connect to an offboard API and bridge MAVLink messages to PX4.
- (Optional) A serial connection can be used to connect Joystick/Gamepad hardware via QGroundControl.

# HITL vs SITL
SITL runs on a development computer in a simulated environment, and uses firmware specifically generated for that environment. Other than simulation drivers to provide fake environmental data from the simulator the system behaves normally.
By contrast, HITL runs normal PX4 firmware in "HITL mode", on normal hardware. The simulation data enters the system at a different point than for SITL. Core modules like commander and sensors have HITL modes at startup that bypass some of the normal functionality.
In summary, HITL runs PX4 on the actual hardware using standard firmware, but SITL actually executes more of the standard system code.
# Setting up HITL
# PX4 Configuration
Connect the autopilot directly to QGroundControl via USB.
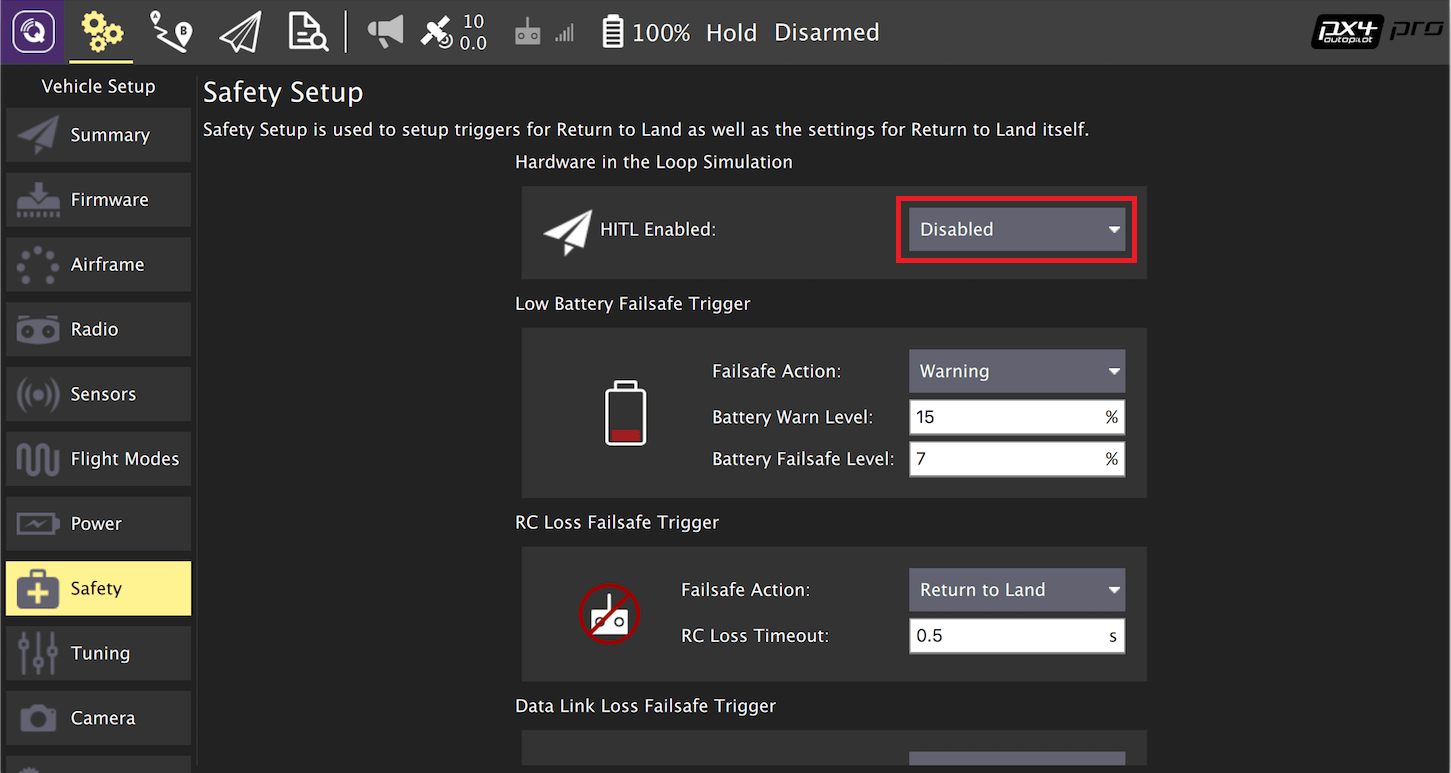
Enable HITL Mode
Open Setup > Safety section.
Enable HITL mode by selecting Enabled from the HITL Enabled list:
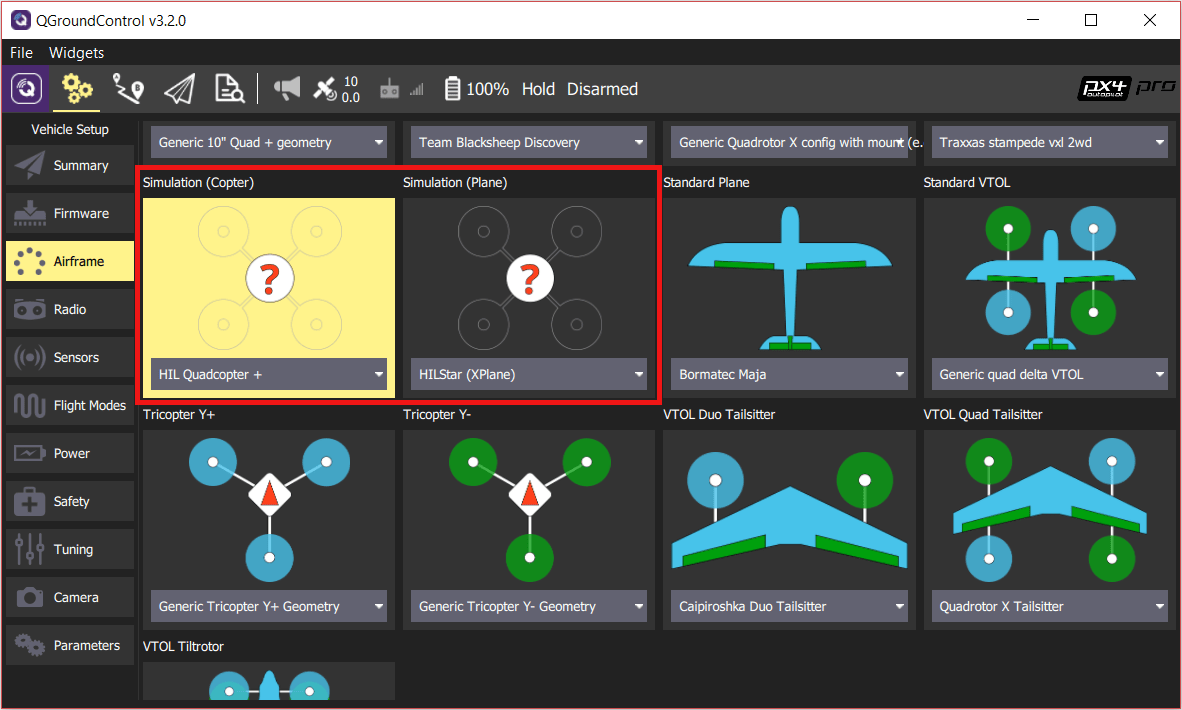
Select Airframe
Open Setup > Airframes
Select a compatible airframe you want to test. Then click Apply and Restart on top-right of the Airframe Setup page.
Calibrate your RC or Joystick, if needed.
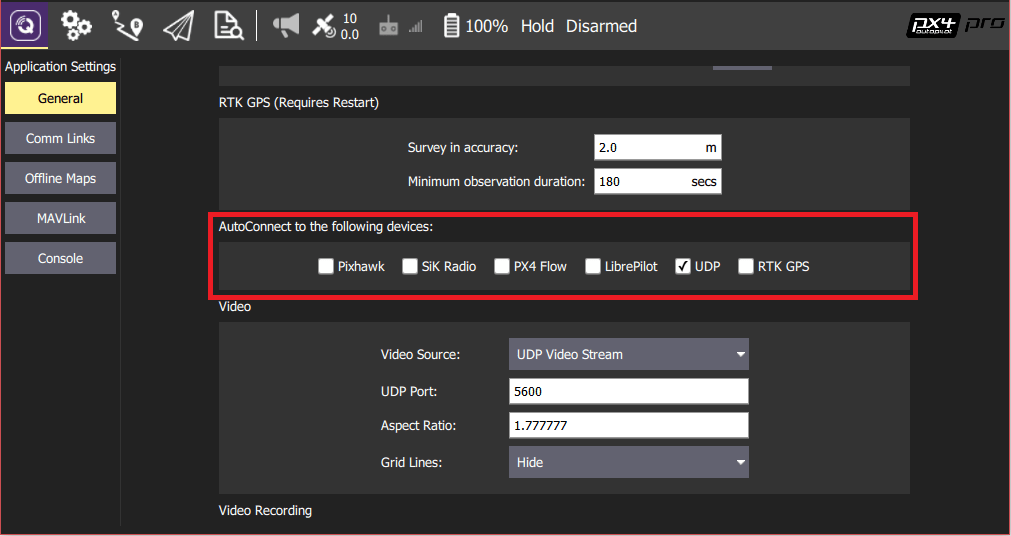
Setup UDP
Under the General tab of the settings menu, uncheck all AutoConnect boxes except for UDP.
(Optional) Configure Joystick and Failsafe. Set the following parameters in order to use a joystick instead of an RC remote control transmitter:
- COM_RC_IN_MODE to "Joystick/No RC Checks". This allows joystick input and disables RC input checks.
- NAV_RCL_ACT to "Disabled". This ensures that no RC failsafe actions interfere when not running HITL with a radio control.
TIP
The QGroundControl User Guide also has instructions on Joystick (opens new window) and Virtual Joystick (opens new window) setup.
Once configuration is complete, close QGroundControl and disconnect the flight controller hardware from the computer.
# Simulator-Specific Setup
Follow the appropriate setup steps for the specific simulator in the following sections.
# Gazebo Classic
Note
Make sure QGroundControl is not running!
Build PX4 with Gazebo Classic (in order to build the Gazebo Classic plugins).
cd <Firmware_clone> DONT_RUN=1 make px4_sitl_default gazebo-classicOpen the vehicle model's sdf file (e.g. Tools/simulation/gazebo-classic/sitl_gazebo-classic/models/iris_hitl/iris_hitl.sdf).
Replace the
serialDeviceparameter (/dev/ttyACM0) if necessary.Note
The serial device depends on what port is used to connect the vehicle to the computer (this is usually
/dev/ttyACM0). An easy way to check on Ubuntu is to plug in the autopilot, open up a terminal, and typedmesg | grep "tty". The correct device will be the last one shown.Set up the environment variables:
source Tools/simulation/gazebo/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_defaultand run Gazebo Classic in HITL mode:
gazebo Tools/simulation/gazebo-classic/sitl_gazebo-classic/worlds/hitl_iris.worldStart QGroundControl. It should autoconnect to PX4 and Gazebo Classic.
# jMAVSim (Quadrotor only)
Note
Make sure QGroundControl is not running!
Connect the flight controller to the computer and wait for it to boot.
Run jMAVSim in HITL mode:
./Tools/simulation/jmavsim/jmavsim_run.sh -q -s -d /dev/ttyACM0 -b 921600 -r 250Note
Replace the serial port name
/dev/ttyACM0as appropriate. On macOS this port would be/dev/tty.usbmodem1. On Windows (including Cygwin) it would be the COM1 or another port - check the connection in the Windows Device Manager.Start QGroundControl. It should autoconnect to PX4 and jMAVSim.
# Fly an Autonomous Mission in HITL
You should be able to use QGroundControl to run missions (opens new window) and otherwise control the vehicle.