# 加载固件
QGroundControl 桌面 版本可以用于安装 PX4 固件到 Pixhawk系列 飞行控制板。
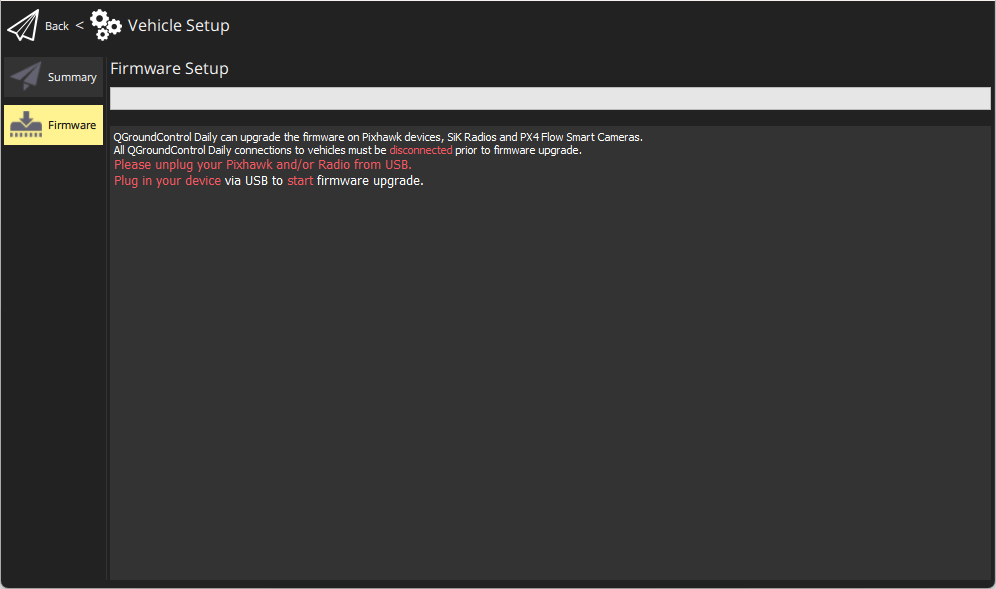
Caution 在开始安装固件前 飞行器的所有USB连接必须 断开 (包括直接连接或通过数传连接)。 飞行器必须 不能 由电池供电。 :::
# 安装稳定的PX4版本
通常您应该使用最新 发布 PX4版本,以便修复错误并获得最新的功能。
提示
This is the version that is installed by default.
To install PX4:
打开 QGroundControl 并连接上机体。
选择**"Q" 图标>机体设置>固件**(侧边栏)打开固件设置
Connect the flight controller directly to your computer via USB.
注解
Connect directly to a powered USB port on your machine (do not connect through a USB hub). :::
选择 PX4 Pro 稳定版本的 vX.x.x 选项为您的飞行控制器 (自动检测) 安装最新稳定版本的 PX4 *
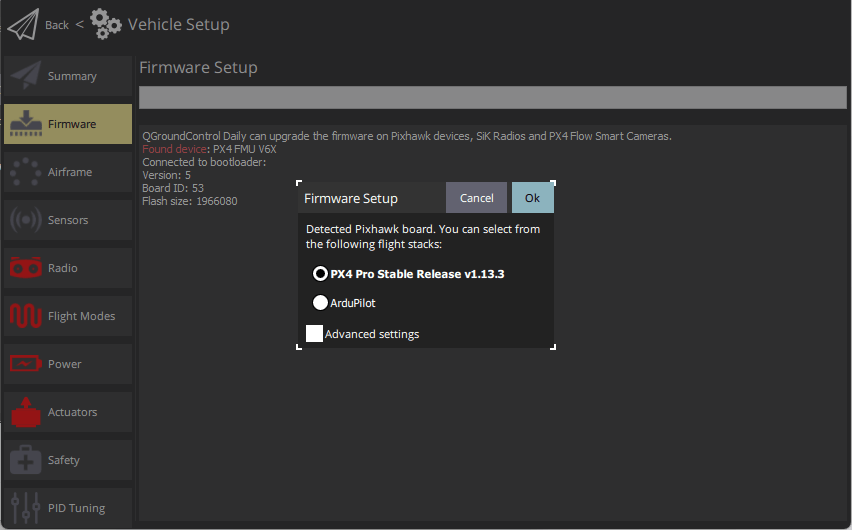
1
单击 OK 按钮开始更新。
The firmware will then proceed through a number of upgrade steps (downloading new firmware, erasing old firmware etc.). Each step is printed to the screen and overall progress is displayed on a progress bar.
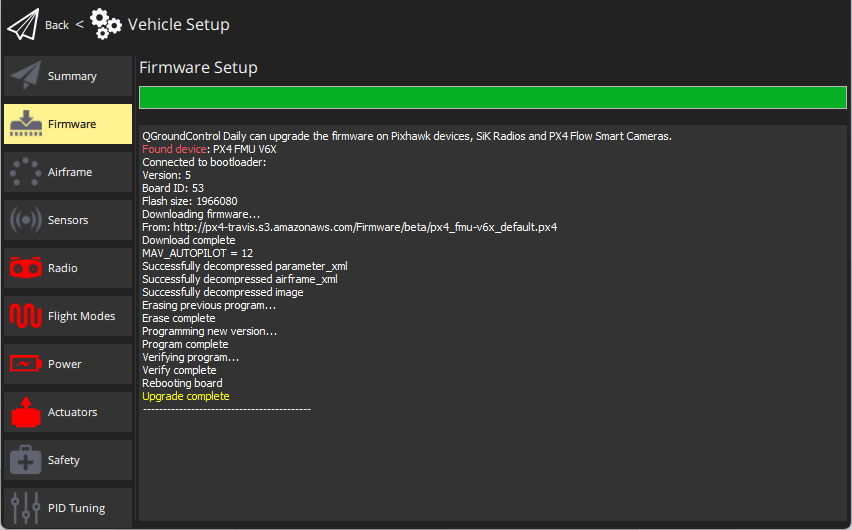
Once the firmware has completed loading, the device/vehicle will reboot and reconnect.
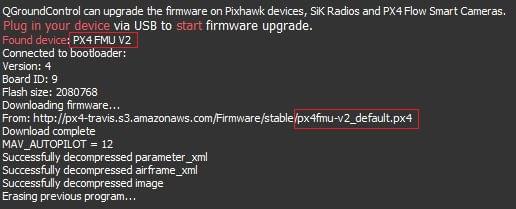
如果 QGroundControl 安装FMUv2 固件(请参阅安装过程中的控制台),并且您有一个更新的飞控板,则可能需要更新bootloader,以访问飞行控制器上的所有内存。 :::
Next you will need to specify the vehicle airframe (and then sensors, radio, etc.)
# 安装PX4 Main, Beta或自定义固件
To install a different version of PX4:
- 如上所述连接飞行器,并选择 PX4 飞行栈 vX.x.x Stagable Release.

- 检查 高级设置 并从下拉列表中选择版本:
- 标准版本 (稳定): 默认版本 (即无需使用高级设置来安装!)
- Beta 测试(beta): 测试/候选版本。 只有当新版本准备完毕时才可用。
- Developer Build (master): PX4/PX4-Autopilot 主分支 最新版本。
- 自定义固件文件...: 自定义固件文件 (例如你已在本地构建的)。 如果选择 Custom firmware file ,您需要在下一步中从文件系统中选择自定义固件。
Firmware update then continues as before.
# Bootloader 更新
硬件通常预先安装匹配版本的引导程序。
您可能需要更新的是安装较新的 Pixhawk 板FMUv2 固件 。 如果 QGroundControl 安装FMUv2 固件(请参阅安装过程中的控制台),并且您有一个更新的飞控板,则可能需要更新bootloader,以访问飞行控制器上的所有内存。
您可以按照 引导加载器更新 > FMUv2 启动加载器更新