# 펌웨어 설치 및 업데이트
QGroundControl 데스크톱 버전에서 Pixhawk 시리즈 비행 콘트롤러의 PX4 펌웨어를 설치할 수 있습니다.
WARNING
펌웨어 설치를 시작하기 전에 직접 또는 텔레메트리 연결을 포함한 기체의 모든 USB 연결을 해제하여야 합니다. 기체에 배터리를 연결하지 않아야 합니다.
# PX4 안정 버전 설치
가장 최근에 출시된 PX4 버전은 알려진 버그들이 수정되었으며, 최신 기능을 지원합니다.
TIP
안정 버전은 기본적으로 설치되는 버전입니다.
PX4 설치
QGroundControl을 시작하고 기체에 연결합니다.
펌웨어 설정을 오픈하여 사이드바의 "Q" icon > Vehicle Setup > Firmware을 선택하십시오.
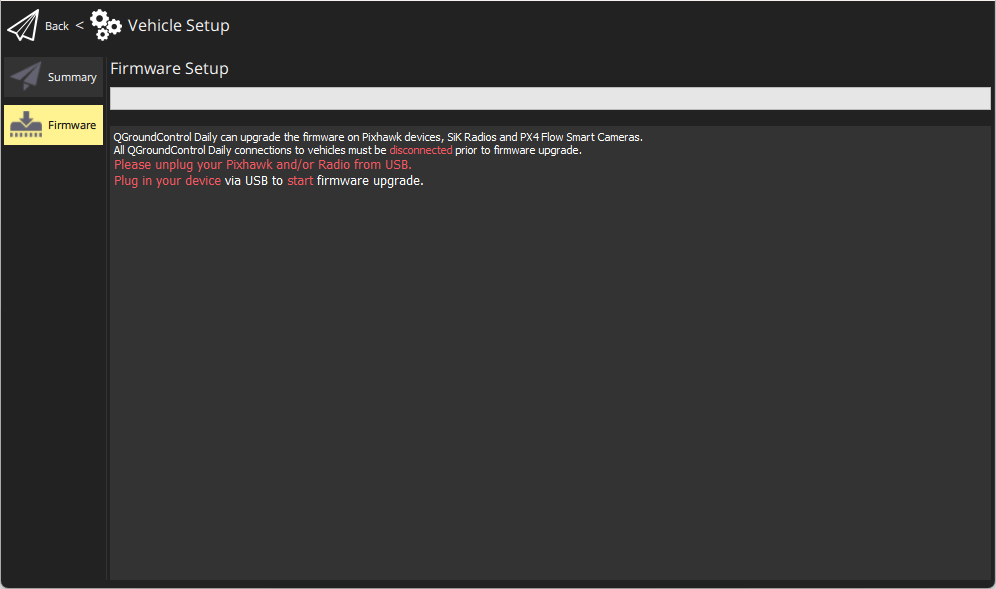
USB를 통해 비행 콘트롤러를 컴퓨터에 직접 연결합니다.
Note
주컴퓨터에서 전원이 공급되는 USB 포트에 직접 연결합니다(USB 허브로 연결하지 마십시오).
Select the PX4 Pro Stable Release vX.x.x option to install the latest stable version of PX4 for your flight controller (autodetected).
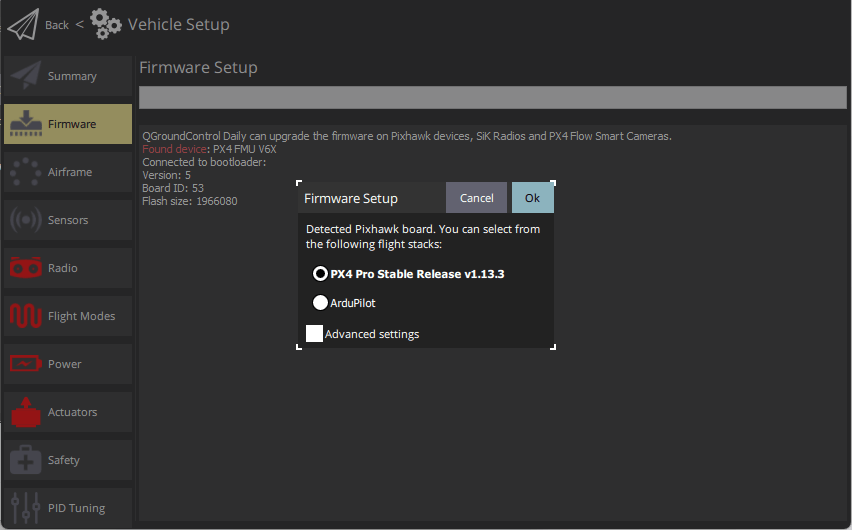
업데이트를 시작하려면 OK 버튼을 클릭합니다.
펌웨어가 업그레이드(펌웨어 다운로드, 이전 펌웨어 삭제 등)를 진행합니다. 각 단계 화면을 표출하고, 전체 진행률이 표시줄에 출력됩니다.
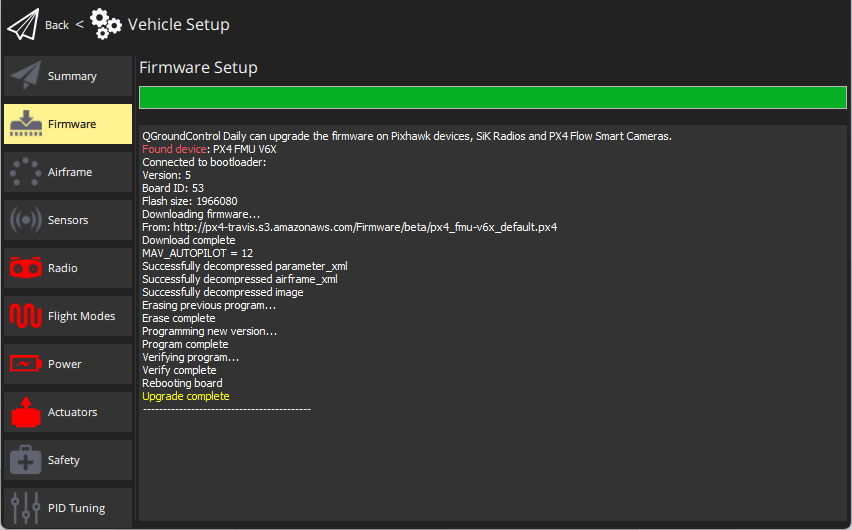
펌웨어의 업로드가 완료되면, 장치가 재부팅되고 다시 연결됩니다.
TIP
QGroundControl FMUv2 대상 설치(설치 하는 동안 콘솔 참조) 하고 새로운 보드, 비행 콘트롤러에서 모든 메모리를 액세스 하려면 부트 로더를 업데이트 하여야 합니다.
다음으로 기체 프레임을 지정하여야 합니다(그리고 센서, 라디오 등).
# Installing PX4 Main, Beta or Custom Firmware
다른 버전의 PX4 설치
- Connect the vehicle as above, and select PX4 Pro Stable Release vX.x.x.

- 고급 설정을 선택하고 드롭 다운 목록에서 설치할 버전을 선택합니다.
- 표준 버전 (안정) : 기본 버전 (즉, 설치를 위해 고급 설정을 사용할 필요가 없습니다!)
- 베타 테스트 (베타): 베타/후보 버전입니다. 신규 버전 출시 이전에 테스트 할 경우에만 사용할 수 있습니다.
- Developer Build (master): The latest build of PX4/PX4-Autopilot main branch.
- 사용자 지정 펌웨어 파일 ... : 사용자 지정 펌웨어 파일 (예 : 로컬에서 빌드 한 파일). 사용자 정의 펌웨어 파일을 선택한 경우 다음 단계에서 파일 시스템에서 사용자 정의 펌웨어를 선택하여야 합니다.
그러면 펌웨어 업데이트가 이전과 같이 계속됩니다.
# Bootloader Update
Pixhawk hardware usually comes with an appropriate bootloader version pre-installed.
A case where you may need to update is newer Pixhawk boards that install FMUv2 firmware. 다른 버전의 PX4 설치
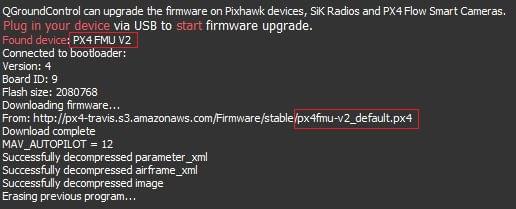
You can update it by following the instructions in Bootloader update > FMUv2 Bootloader Update.