# CubePilot Cube Yellow Flight Controller
PX4 does not manufacture this (or any) autopilot. Contact the [manufacturer](https://cubepilot.org/#/home) for hardware support or compliance issues.
The Cube Yellow flight controller is a flexible autopilot intended primarily for manufacturers of commercial systems.

The controller is designed to be used with a domain-specific carrier board in order to reduce the wiring, improve reliability, and ease of assembly. For example, a carrier board for a commercial inspection vehicle might include connections for a companion computer, while a carrier board for a racer could includes ESCs for the frame of the vehicle.
Cube includes vibration isolation on two of the IMU's, with a third fixed IMU as a reference / backup.
提示
The manufacturer Cube Docs (opens new window) contain detailed information, including an overview of the Differences between Cube Colours (opens new window).
# 主要特性
- 32bit STM32F777VI (32bit ARM Cortex M7 (opens new window), 400 MHz, Flash 2MB, RAM 512 KB).
- 32 bit STM32F103 failsafe co-processor
- 14 PWM / Servo outputs (8 with failsafe and manual override, 6 auxiliary, high-power compatible)
- Abundant connectivity options for additional peripherals (UART, I2C, CAN)
- Integrated backup system for in-flight recovery and manual override with dedicated processor and stand-alone power supply (fixed-wing use)
- Backup system integrates mixing, providing consistent autopilot and manual override mixing modes (fixed-wing use)
- Redundant power supply inputs and automatic failover
- External safety switch
- Multicolor LED main visual indicator
- High-power, multi-tone piezo audio indicator
- microSD card for high-rate logging over extended periods of time
# 在哪里买
# 组装
# 产品规格
- 处理器:
- STM32F777VI (32bit ARM Cortex M7 (opens new window))
- 400 MHz
- 512 KB MB RAM
- 2 MB Flash
- Failsafe co-processor:
- STM32F100 (32bit ARM Cortex-M3)
- 24 MHz
- 8 KB SRAM
- Sensors: (all connected via SPI)
- Accelerometer: (3) ICM20948, ICM20649, ICM20602
- Gyroscope: (3) ICM20948, ICM20649, ICM20602
- Compass: (1) ICM20948
- Barometric Pressure Sensor: (2) MS5611
- Operating Conditions:
- Operating Temp: -10C to 55C
- IP rating/Waterproofing: Not waterproof
- Servo rail input voltage: 3.3V / 5V
- USB port input:
- Voltage: 4V - 5.7V
- Rated current: 250 mA
- POWER:
- Input voltage: 4.1V - 5.7V
- Rated input current: 2.5A
- Rated input/output power: 14W
- 尺寸:
- Cube: 38.25mm x 38.25mm x 22.3mm
- Carrier: 94.5mm x 44.3mm x 17.3mm
- 接口
- IO Ports: 14 PWM servo outputs (8 from IO, 6 from FMU)
- 5x UART (serial ports), one high-power capable, 2x with HW flow control
- 2x CAN (one with internal 3.3V transceiver, one on expansion connector)
- R/C inputs:
- Spektrum DSM / DSM2 / DSM-X® Satellite compatible input
- Futaba S.BUS® compatible input and output
- PPM-SUM signal input
- RSSI (PWM or voltage) input
- I2C
- SPI
- 3.3v ADC input
- Internal microUSB port and external microUSB port extension
# 引脚和原理图
Board schematics and other documentation can be found here: The Cube Project (opens new window).
# Ports
# Top-Side (GPS, TELEM etc)
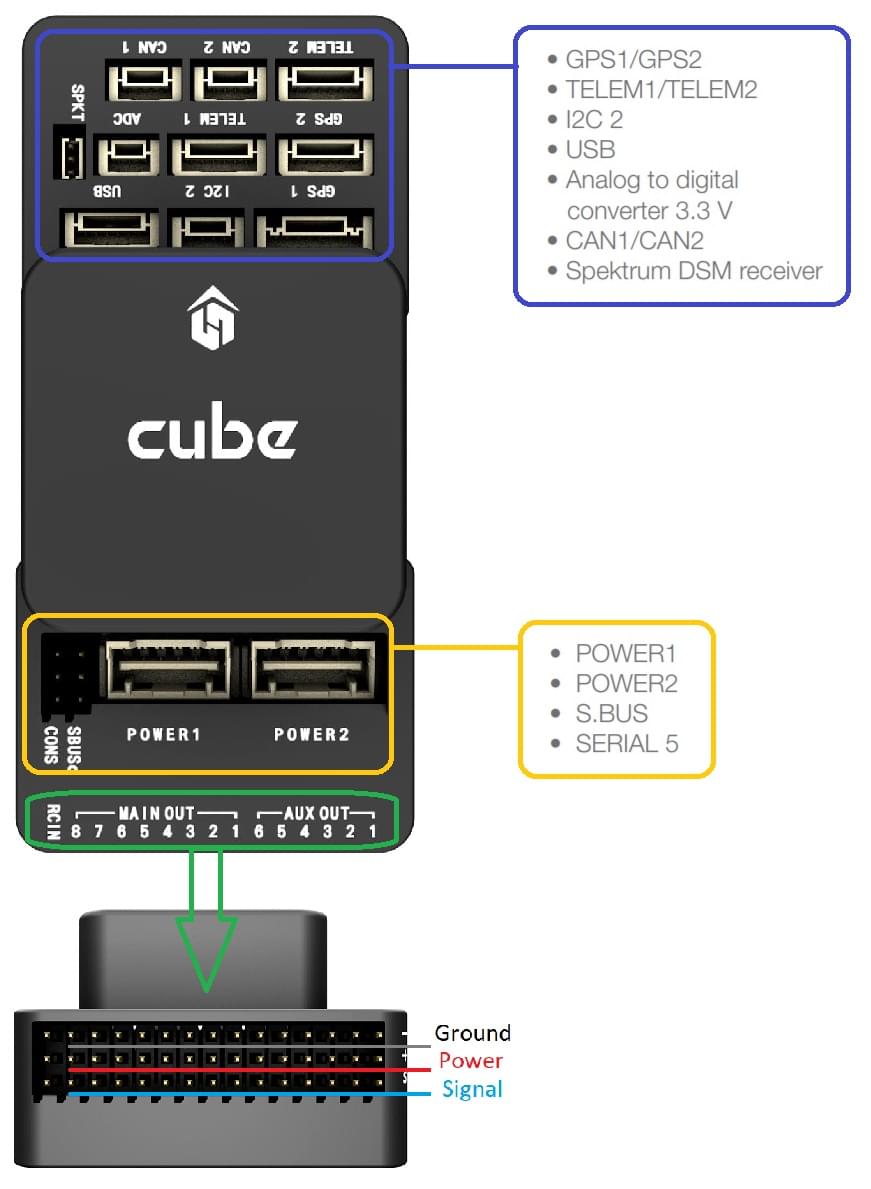
# Serial Port Mapping
| UART | 设备 | Port |
|---|---|---|
| USART2 | /dev/ttyS0 | TELEM1 (flow control) |
| USART3 | /dev/ttyS1 | TELEM2 (flow control) |
| UART4 | /dev/ttyS2 | GPS1 |
| USART6 | /dev/ttyS3 | PX4IO |
| UART7 | /dev/ttyS4 | CONSOLE/ADSB-IN |
| UART8 | /dev/ttyS5 | GPS2 |
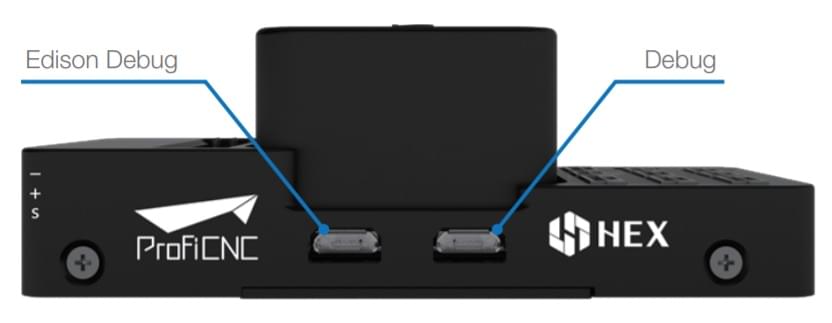
# Debug Ports
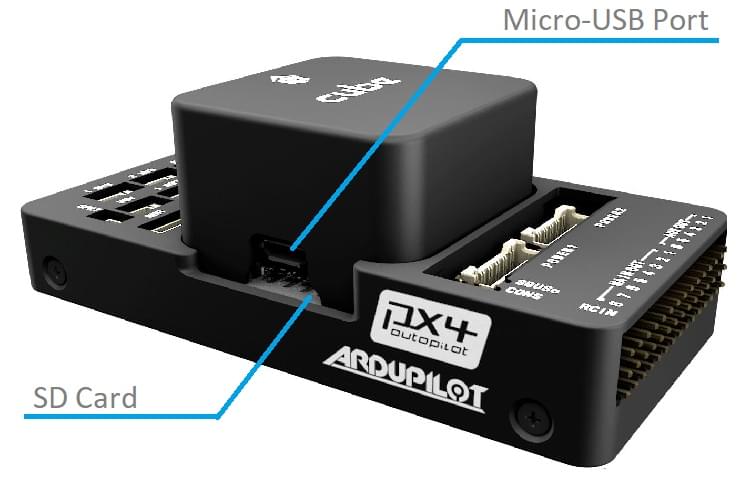
# USB/SDCard Ports
# 编译固件
提示
Most users will not need to build this firmware! It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
To build PX4 for this target:
make cubepilot_cubeyellow
# Issues
CAN1 and CAN2 silk screen on the Cube are flipped (CAN1 is CAN2 and vice versa).