# Wing Wing Z-84 Pixracer Build
The Wing Wing Z-84 is a flying wing frame. It is small, rugged and just large enough to host a Pixracer.
Key information:
- Frame: Wing Wing Z-84
- Flight controller: Pixracer

# 配件列表
# Z-84 Plug n' Fly (PNF/PNP) or Kit
One of these:
提示
PNF (or "PNP") versions include motor, propeller and electronic speed controller. The "kit" version does not include these components, which must be purchased separately.
# Electronic Speed Controller (ESC)
One of these (any small (>=12A) ESC will do):
- Turnigy 20A Brushed ESC ESC (opens new window) (Hobbyking)
- Lumenier Regler 30A BLHeli_S ESC OPTO (opens new window) (GetFPV)
# Autopilot and Essential Components
- Pixracer kit (including GPS and power module)
- FrSky D4R-II receiver or equivalent (jumpered to PPM sum output according to its manual)
- Mini telemetry set for Holybro pix32
- Digital airspeed sensor for Holybro pix32 / Pixfalcon
- 1800 mAh 2S LiPo Battery - e.g. Team Orion 1800mAh 7.4V 50C 2S1P (opens new window)
# Recommended spare parts
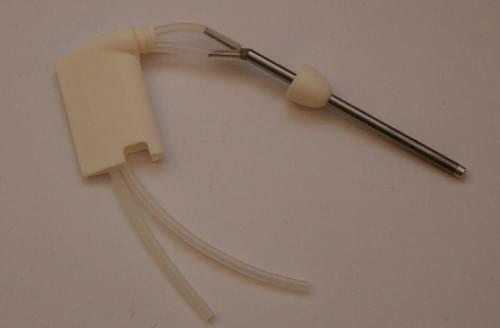
- 1 cm diameter O-ring for prop saver (Hobbyking (opens new window))
- 125x110 mm propellers (Hobbyking (opens new window))
# 布线
Wire the servos and motors as shown. Use the MAIN outputs (not the ones labeled with AUX). The motor controller needs to have an in-built BEC, as the autopilot is not powering the servo rail.
| Port | 接口定义 |
|---|---|
| RC IN | PPM or S.BUS / S.BUS2 input |
| MAIN 1 | Left Aileron |
| MAIN 2 | Right Aileron |
| MAIN 3 | 空白 |
| MAIN 4 | Motor 1 |
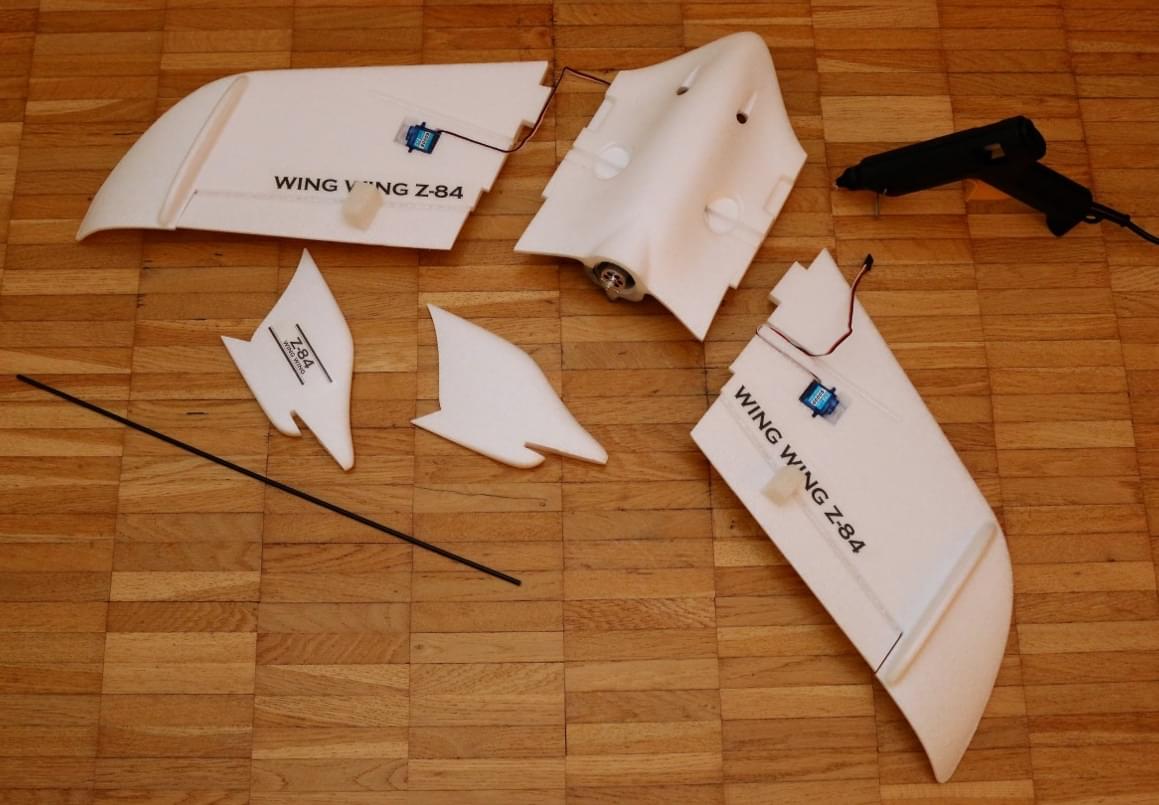
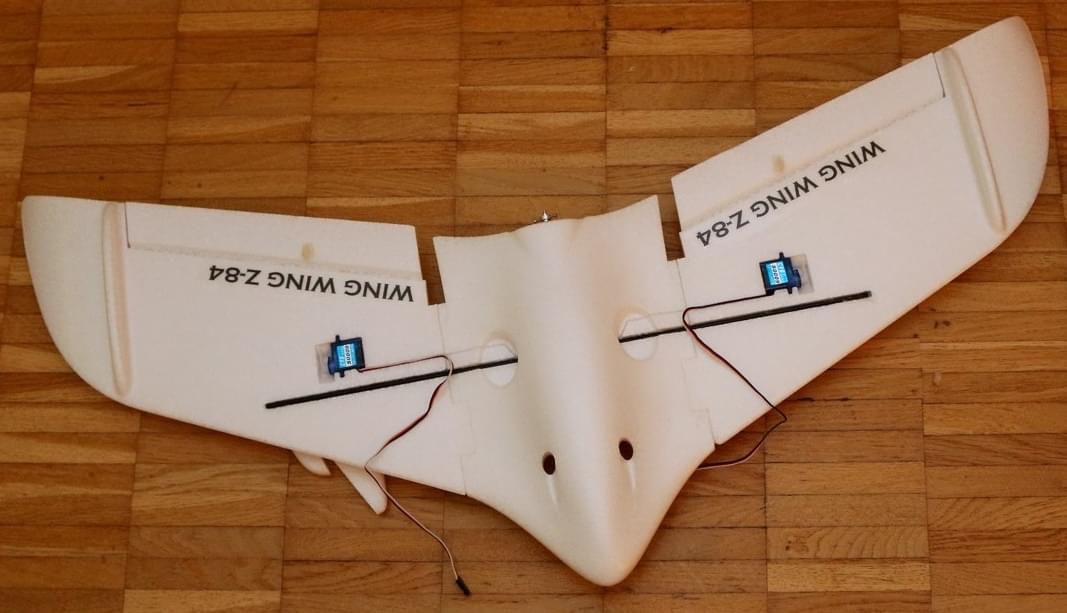
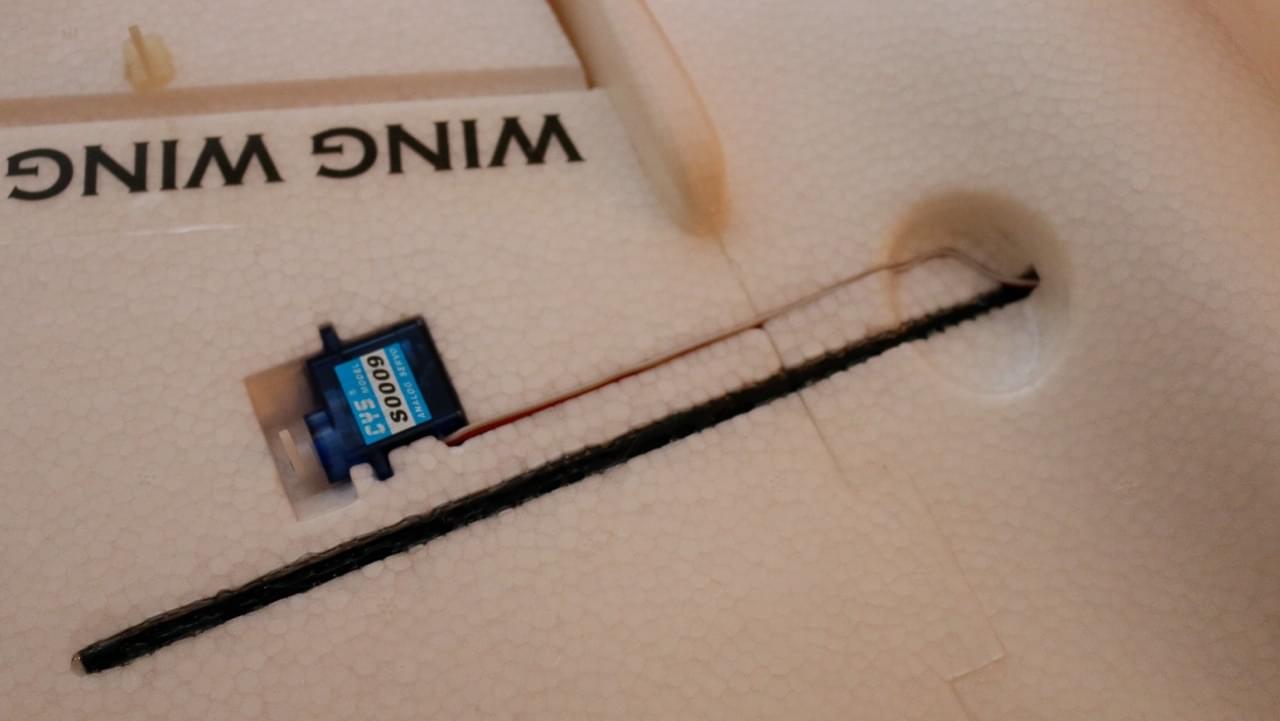
# Build Log
The images below give a rough idea about the assembly process, which is simple and can be done with a hot glue gun.

# PX4 Configuration
# Airframe Configuration
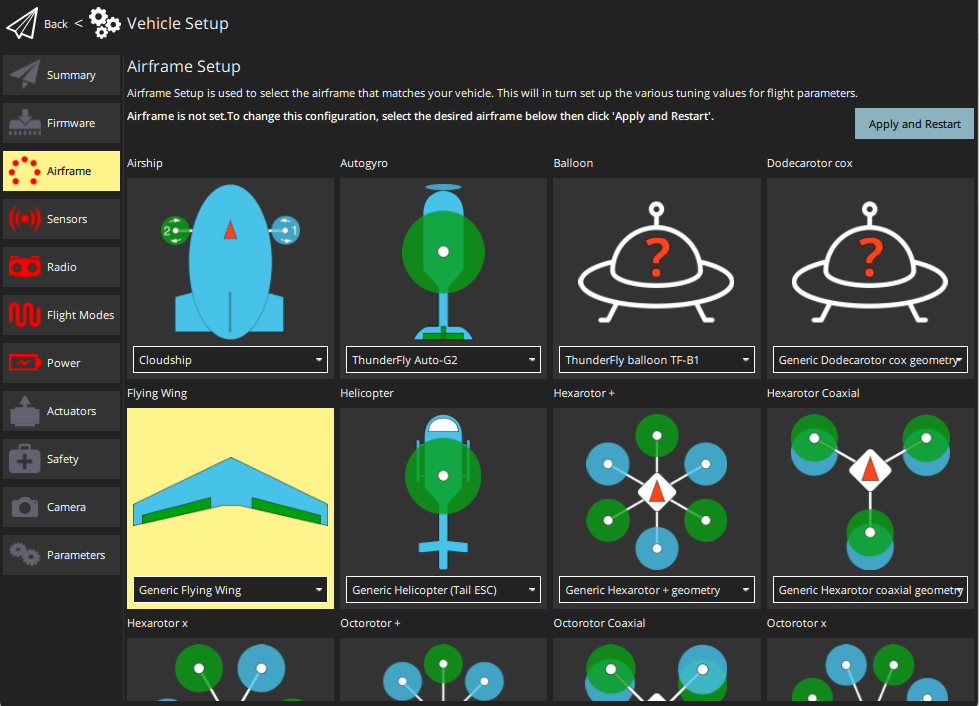
Select Flying Wing > Generic Flying Wing in the QGroundControl Airframe Configuration:
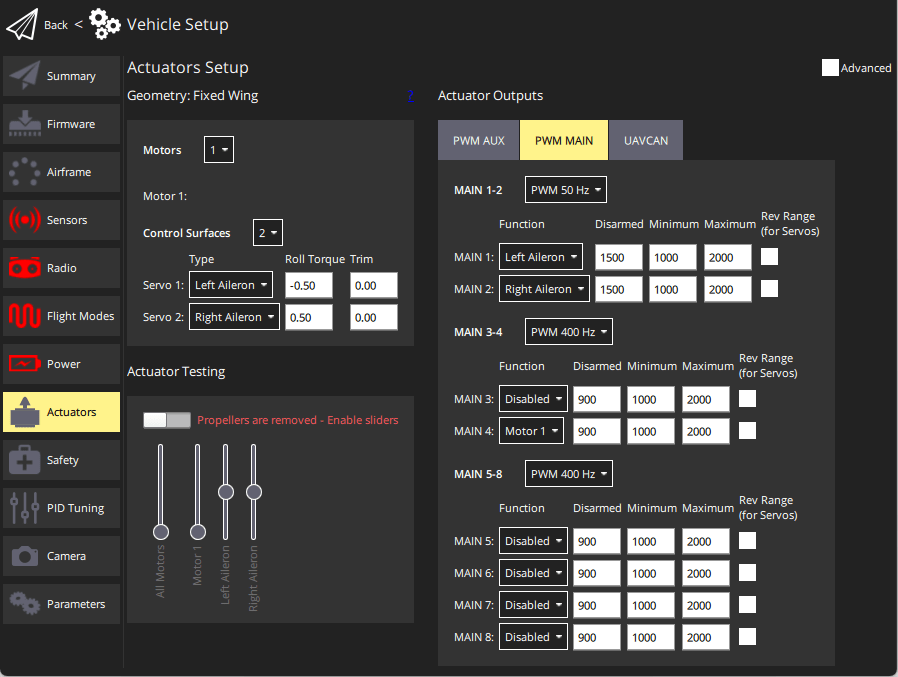
# Actuator Mapping
Set up the Actuator Configuration to match the wiring for the ailerons and throttle as indicated above.
# Other Configuration
Perform all the the other Basic Configuration, including Autotuning.
Advanced tuning is optional - see Fixed-wing Vehicle Configuration.