# Wing Wing Z-84 Pixracer 조립
The Wing Wing Z-84 is a flying wing frame. It is small, rugged and just large enough to host a Pixracer.
주요 정보:
- 기체: Wing Wing Z-84
- 비행 컨트롤러: Pixracer

# 부품 목록
# Z-84 Plug n' Fly (PNF/PNP) 또는 키트
다음 중 하나 :
TIP
PNF (또는 "PNP") 버전에는 모터, 프로펠러와 ESC가 포함됩니다. "키트" 버전에는 이러한 부품들이 포함되어 있지 않아서, 별도로 구매하여야 합니다.
# 전기 속도 컨트롤러 (ESC)
다음 중 하나 (작은 (> = 12A) ESC가 수행함) :
- Turnigy 20A Brushed ESC ESC (opens new window) (Hobbyking)
- Lumenier Regler 30A BLHeli_S ESC OPTO (opens new window) (GetFPV)
# Autopilot 및 필수 부품들
- Pixracer kit (including GPS and power module)
- FrSky D4R-II 수신기 또는 동급 (설명서에 따라 PPM 합계 출력으로 점퍼됨)
- Holybro pix32용 미니 텔레메트리 세트
- Holybro pix32 / Pixfalcon용 디지털 대기 속도 센서
- 1800mAh 2S LiPo 배터리 - 예 : 팀 오리온 1800mAh 7.4V 50C 2S1P (opens new window)
# 권장 예비 부품
- 프로펠러 보호용 직경 1cm O - 링 (Hobbyking (opens new window))
- 125x110 mm 프로펠러 (Hobbyking (opens new window))
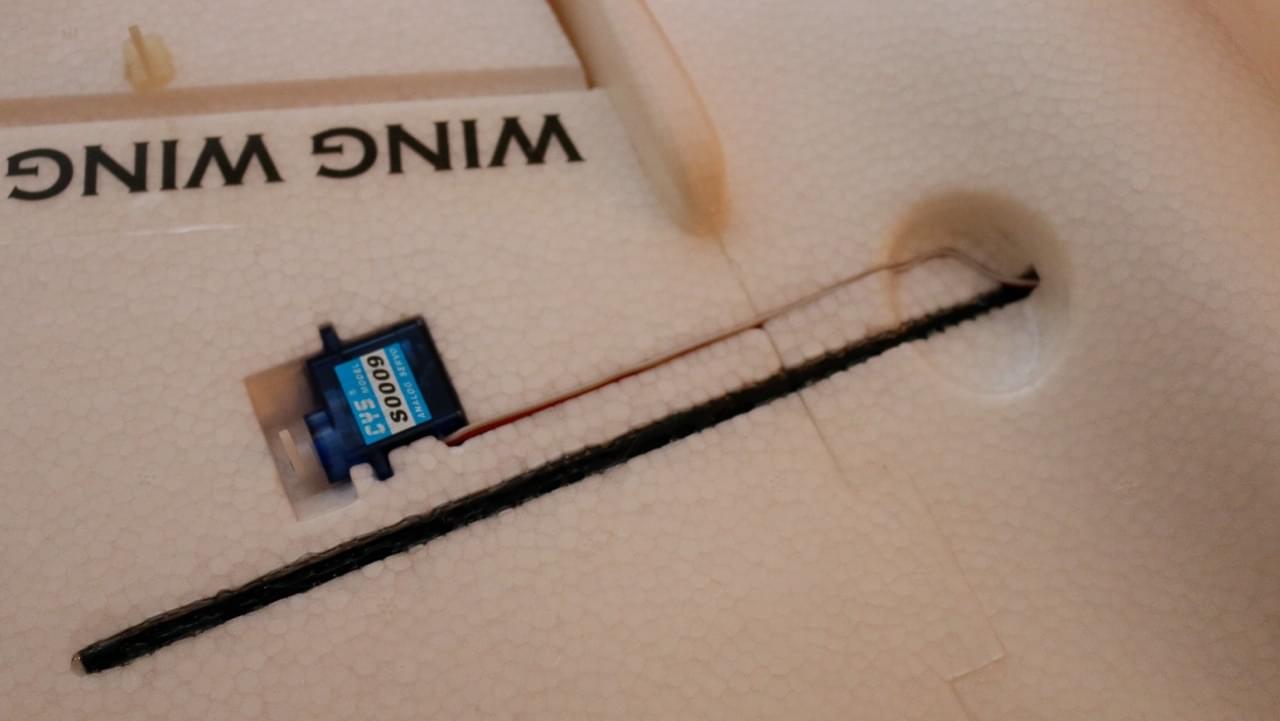
# 배선
Wire the servos and motors as shown. Use the MAIN outputs (not the ones labeled with AUX). 자동조종장치가 서보 레일에 전원을 공급하지 않으므로, 모터 컨트롤러에는 내장 BEC가 있어야합니다.
| 포트 | 연결 |
|---|---|
| RC IN | PPM or S.BUS / S.BUS2 input |
| MAIN 1 | 좌측 보조익 |
| MAIN 2 | 우측 보조익 |
| MAIN 3 | 비어있음 |
| MAIN 4 | Motor 1 |
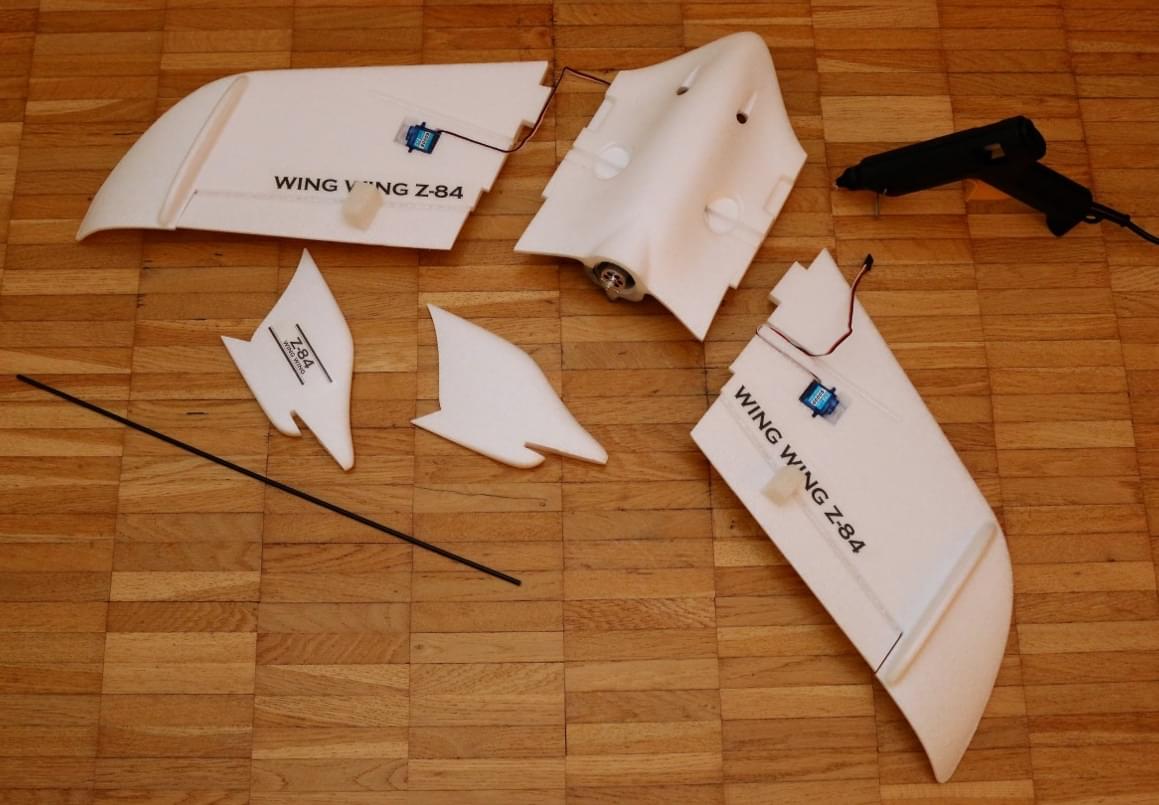
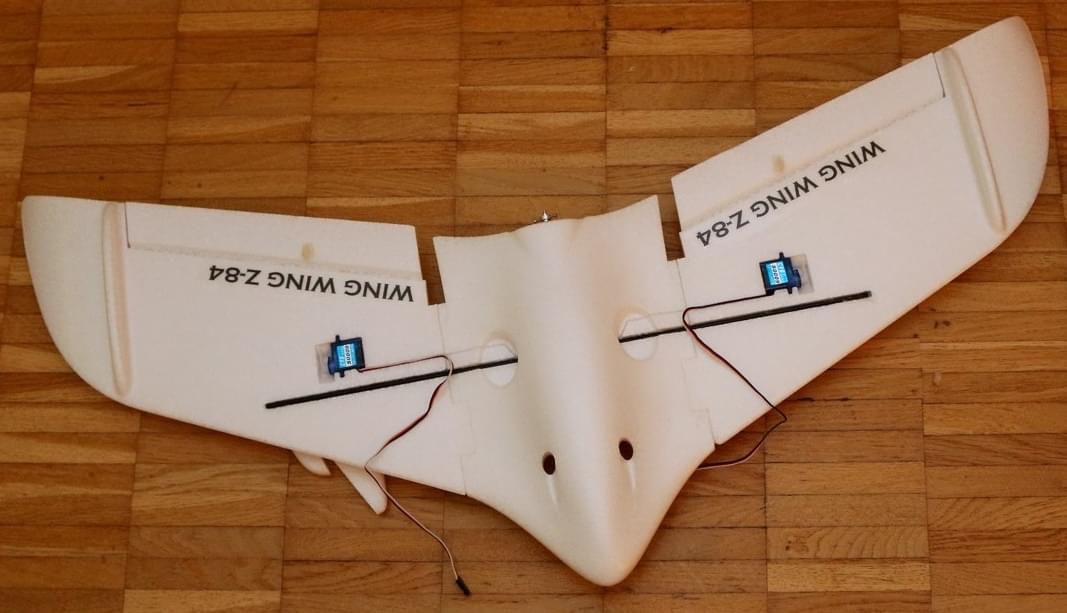
# 조립 방법
아래 이미지는 조립 공정에 대한 대략적인 아이디어를 제공합니다. 글루건을 사용하는 것이 좋습니다.

# PX4 Configuration
# 기체 설정
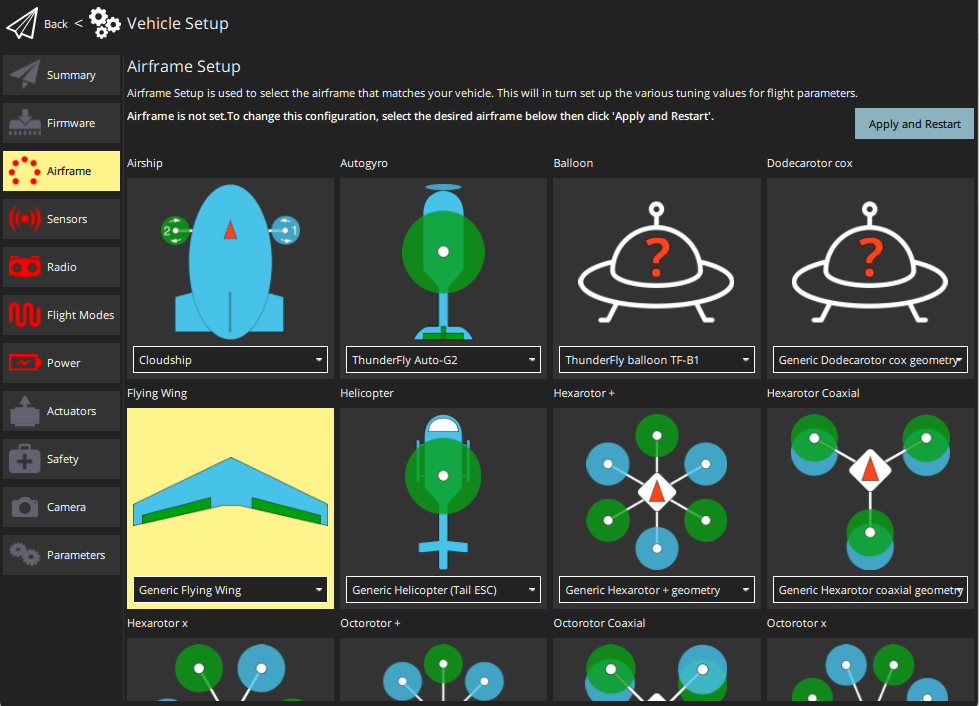
Select Flying Wing > Generic Flying Wing in the QGroundControl Airframe Configuration:
# Actuator Mapping
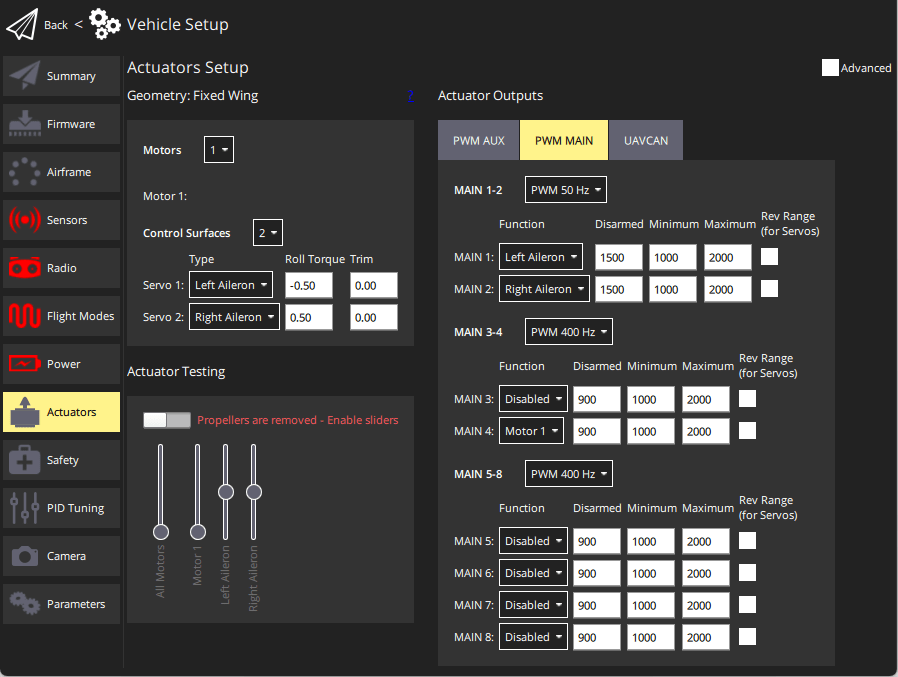
Set up the Actuator Configuration to match the wiring for the ailerons and throttle as indicated above.
# Other Configuration
Perform all the the other Basic Configuration, including Autotuning.
Advanced tuning is optional - see Fixed-wing Vehicle Configuration.