# E-flite Convergence Tiltrotor VTOL (Pixfalcon)
E-Flite 컨버전스 (opens new window) PX4의 자율 비행 기능을 지원하는 VTOL로 변환 할 수 있습니다. 공간이 여유가 많지는 않지만, GPS, 텔레메트리와 Pixfalcon은 충분히 창작가능합니다.
# 하드웨어 설정
컨버전스에는 7 개의 PWM 신호가 필요하며 다음과 같은 방식으로 Pixfalcon에 연결됩니다 (PX4의 기체 구성과 일치, 비행기 뒤에서 본 왼쪽 / 오른쪽).
| 포트 | 연결 |
|---|---|
| MAIN 1 | 우측 모터 |
| MAIN 2 | 좌측 모터 |
| MAIN 3 | 후면 모터 |
| MAIN 4 | 없음 |
| MAIN 5 | 우측 틸트 서보 |
| MAIN 6 | 좌측 틸트 서보 |
| MAIN 7 | 우측 엘레본 |
| MAIN 8 | 좌측 엘레본 |
Pixfalcon은 원래 자동조종장치가 있었던 동일한 장소에 장착 가능합니다.
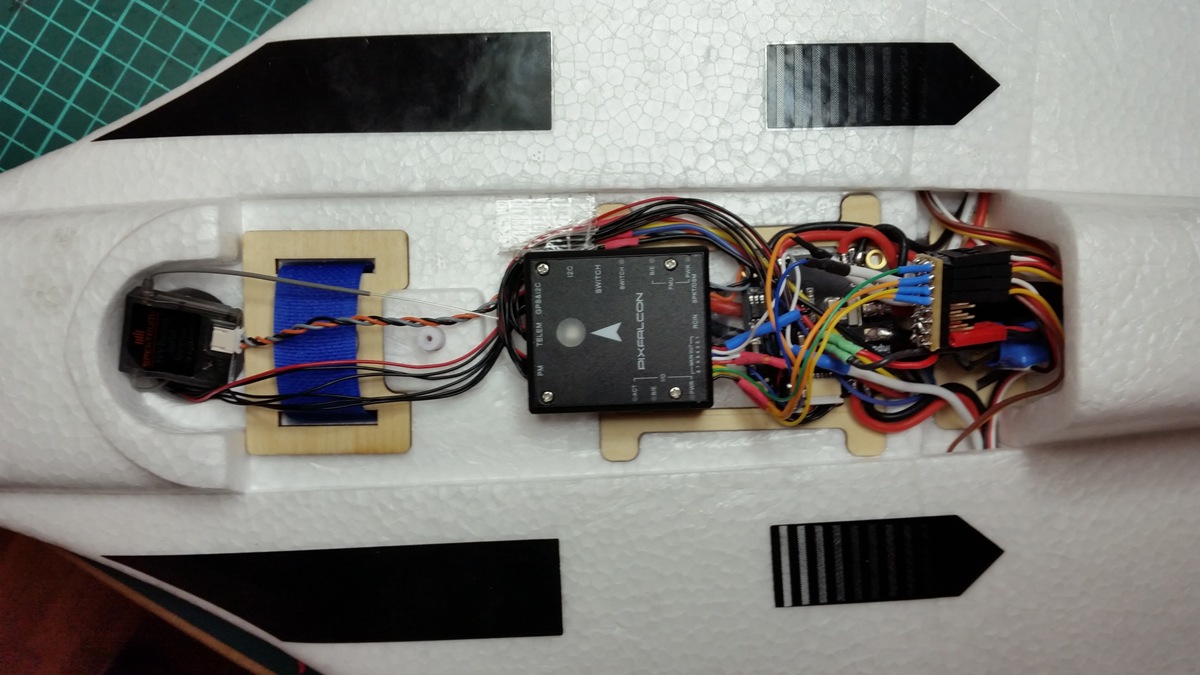
텔레메트리 모듈은 FPV 전송 기어를 고정하기 위한 베이에 장착합니다.
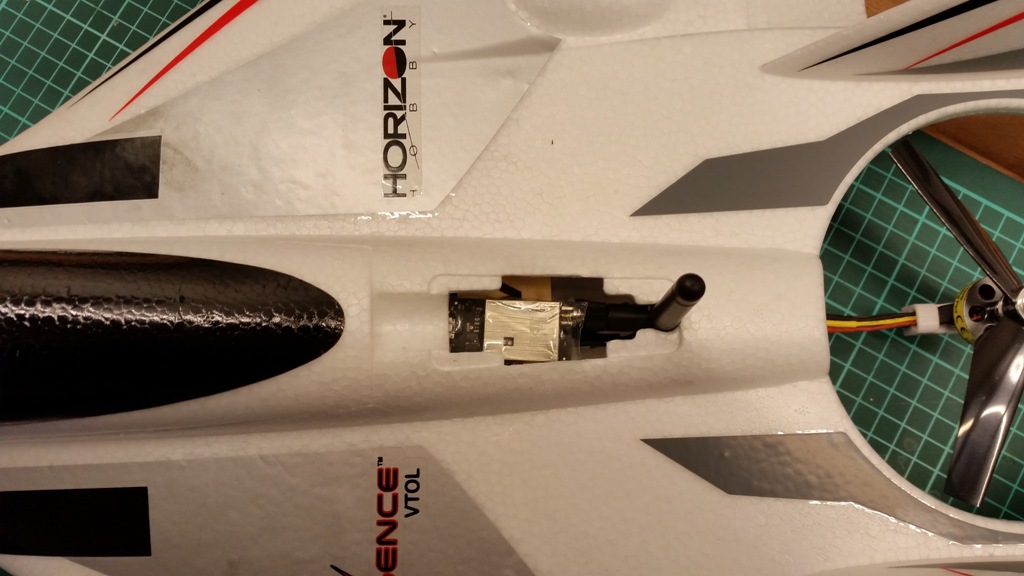
GPS 장착을 위하여 "조종실" 내부의 발포 재질 부분을 잘라냈습니다. GPS를 기체 내부에 손상 없이 장착 가능합니다.

# 설정
자동조종 장치를 정상적으로 설정하기 전에 (무선, 센서, 비행 모드) 아래에서 기체 구성 "E-flite Convergence"를 선택합니다. QGC에서 "VTOL Tiltrotor"를 실행하고 다시 시작합니다.
기체가 아직 QGC에 표시되지 않으면 다음 매개 변수를 설정하고 다시 시작하십시오.
SYS_AUTOSTART: 13012SYS_AUTOCONFIG: 1
참고:
- 고정 날개로 전환하려면 전환 스위치를 지정하여야 합니다.
- 기본적으로 영구 안정화가 활성화됩니다. 고정익에서 완전 수동 비행을 위해서는 VT_FW_PERM_STAB를 0으로 설정하십시오.