# AUAV-X2 자동조종장치 (단종됨)
WARNING
This flight controller has been discontinued and is no longer commercially available.
PX4 does not manufacture this (or any) autopilot. Contact the [manufacturer](https://store.mrobotics.io/) for hardware support or compliance issues.
AUAV® (opens new window) AUAV-X2 자동조종장치는 Pixhawk®-project (opens new window) FMUv2 오픈 하드웨어 디자인 기반입니다. PX4는 NuttX (opens new window) OS에서 실행됩니다.
# 요약
- 메인 시스템 온칩: STM32F427 (opens new window)
- CPU : STM32F427VIT6 ARM 마이크로 컨트롤러 - 개정판 3
- IO: STM32F100C8T6 ARM 마이크로 컨트롤러
- 센서:
- 인벤센스 MPU9250 9DOF
- 인벤센스 ICM-20608 6DOF
- MEAS MS5611 기압계
- 크기/중량
- 크기: 36mm x 50mm
- 장착 위치: 직경 30.5mm x 30.5mm 3.2mm
- 중량: 10.9g
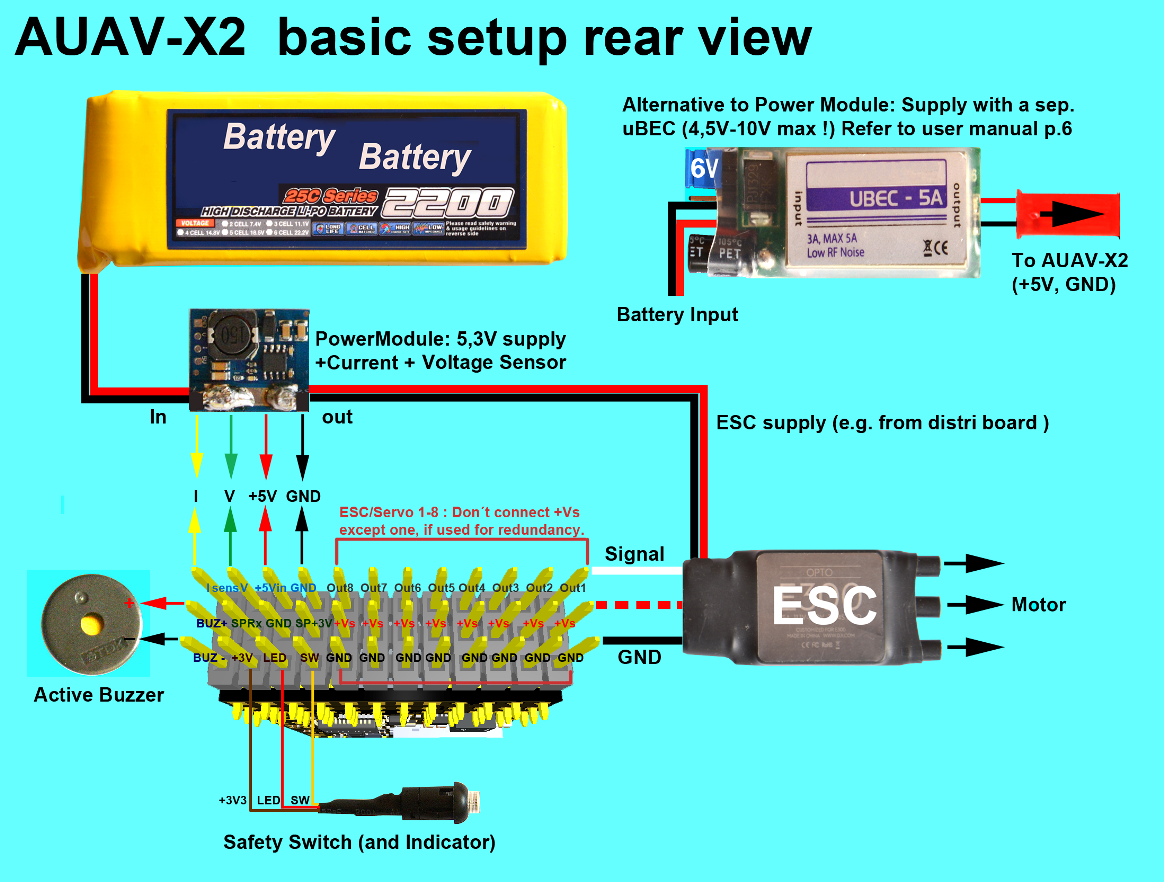
- 역전압 보호 기능의 전원 OR-ing 회로도. 5V 전원 모듈이 필요합니다.
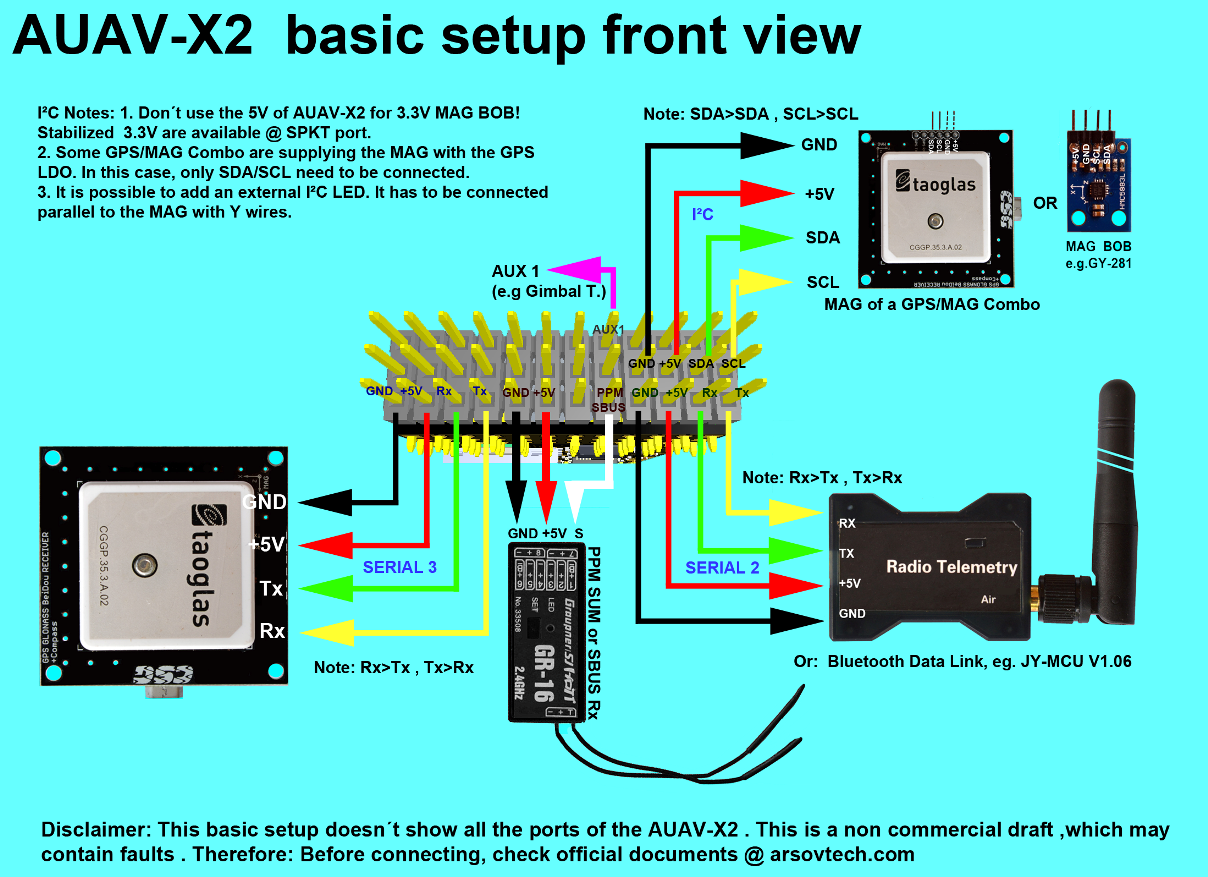
# 연결성
- 2.54mm 헤더 :
- GPS (USART4)
- i2c
- RC 입력
- PPM 입력
- Spektrum 입력
- RSSI 입력
- sBus 입력
- sBus 출력
- 전원 입력
- 부저 출력
- LED 출력
- Servo 출력 8개
- Aux 출력 6개
- USART7 (콘솔)
- USART8 (OSD)
# 구매처
더 이상 생산되지 않습니다. This has been superseded by the mRo X2.1. mRobotics는 2017년 8월부터 AUAV 유통 업체입니다.
# 주요 링크
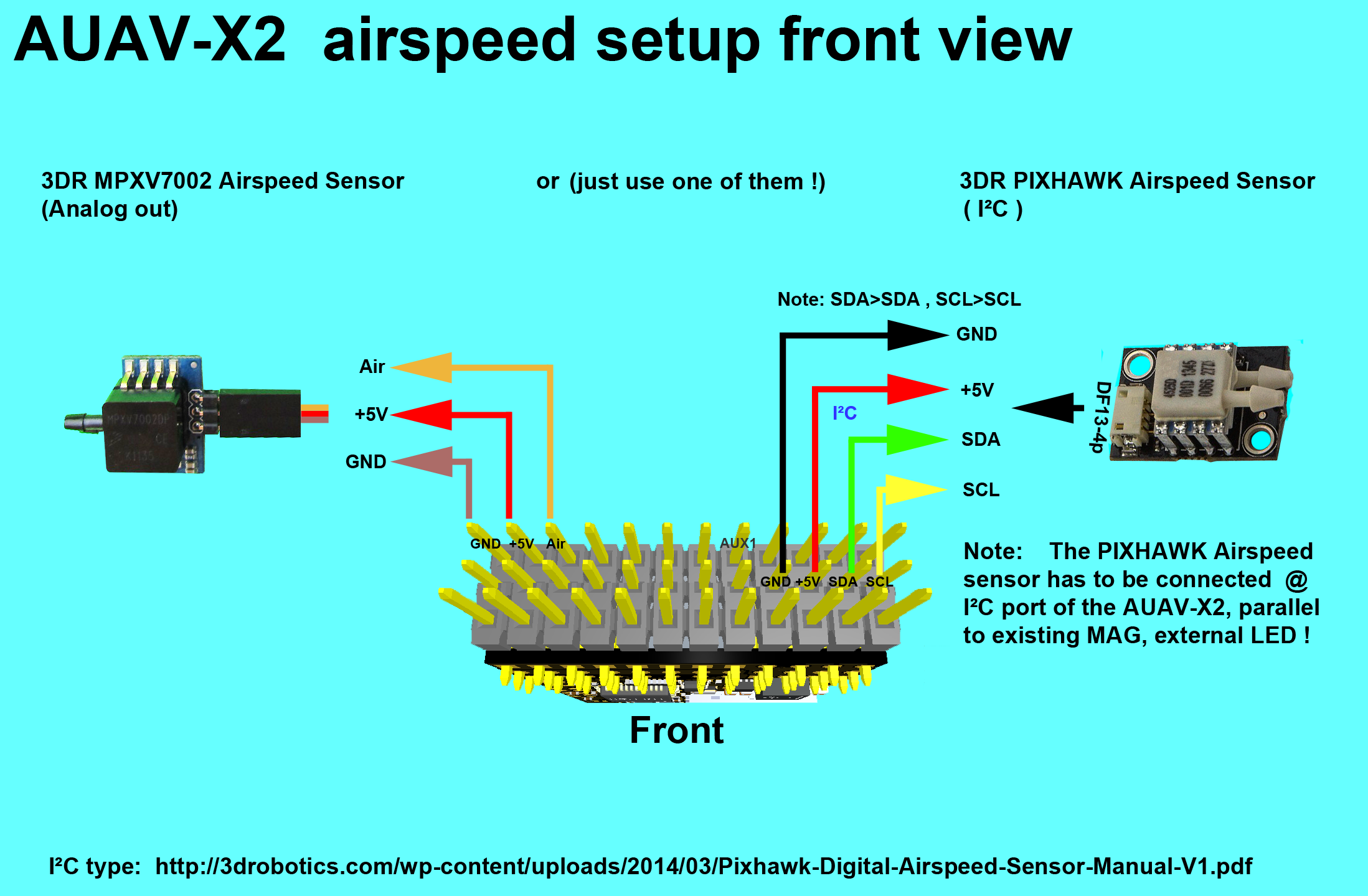
# 배선 가이드
# 회로도
이 보드는 Pixhawk 프로젝트 (opens new window) FMUv2 개방형 하드웨어 설계에 기반합니다.
- FMUv2 + IOv2 회로도 (opens new window) - 회로도 및 레이아웃
CC-BY-SA 3.0 라이센스 오픈 하드웨어 설계로 모든 회로도와 설계 파일을 [사용할 수 있습니다](https://github.com/PX4/Hardware).
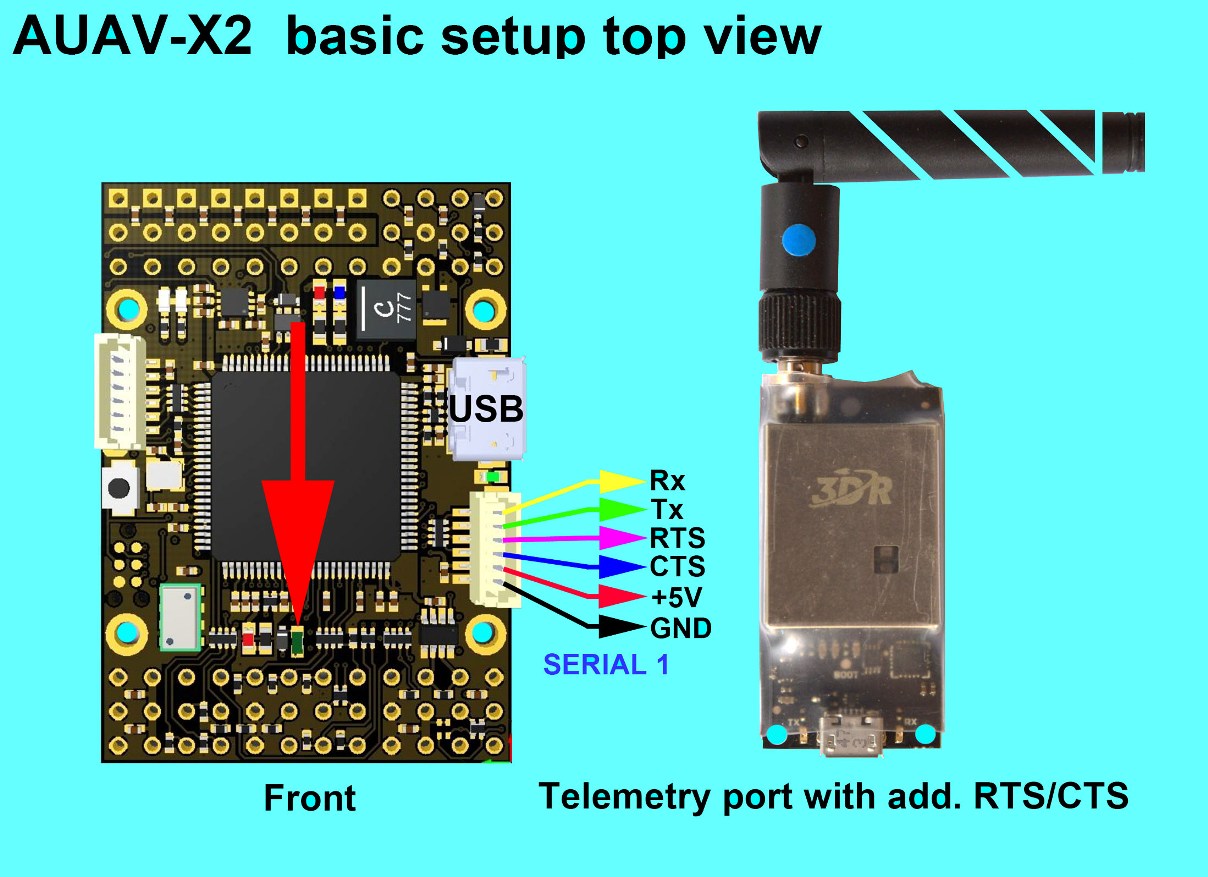
# 시리얼 포트 매핑
| UART | 장치 | 포트 |
|---|---|---|
| UART1 | /dev/ttyS0 | IO 디버그 |
| USART2 | /dev/ttyS1 | TELEM1 (흐름 제어) |
| USART3 | /dev/ttyS2 | TELEM2 (흐름 제어) |
| UART4 | ||
| UART7 | 콘솔 | |
| UART8 | SERIAL4 |