# Cube Yellow 비행 콘트롤러
PX4에서는 이 제품을 제조하지 않습니다. 하드웨어 지원과 호환 문제는 [제조사](https://cubepilot.org/#/home)에 문의하십시오.
PX4 개발팀은이 비행 컨트롤러를 Cube Black의 풋프린트 호환 대체품으로 지원합니다. We recommend however to consider products built on industry standards, such as the [Pixhawk Standards](https://pixhawk.org). 이 비행 컨트롤러는 표준을 따르지 않으며, 특허받은 커넥터를 사용합니다.
Cube Yellow (opens new window) 비행 컨트롤러는 주로 상용 시스템 제조업체를 위한 자동조종장치입니다.

배선을 줄이고 신뢰성을 높이며 조립을 쉽게하기 위해 도메인별 캐리어 보드와 함께 사용하도록 설계되었습니다. 예를 들어, 상용 검사 기체 캐리어보드에는 보조 컴퓨터용 연결이 포함될 수 있는 반면, 레이서 용 캐리어보드는 기체 프레임을 형성하는 ESC를 포함할 수 있습니다.
Cube에는 2 개의 IMU에 진동 차단이 포함되어 있으며, 세 번째 고정 IMU는 참조 백업용으로 사용됩니다.
Note
제조업체 Cube 문서 (opens new window)에는 큐브 색상 간의 차이점 (opens new window) 뿐만 아니라 자세한 정보를 제공합니다.
# 주요 특징
- 32 비트 STM32F777VI (32 비트 ARM Cortex M7 (opens new window), 400 MHz, Flash 2MB, RAM 512 KB).
- 32 비트 STM32F103 장애복구 코프로세서
- 14개 PWM/서보 출력(장애복구 및 수동 오버라이드 포함 8개, 보조, 고전력 호환 6개)
- 다양한 추가 주변 장치(UART, I2C, CAN) 연결 옵션
- 전용 프로세서와 독립형 전원 공급 장치(고정익 적용)로 비행중 복구 기능과 수동 오버라이드 통합 백업 시스템
- 백업 시스템은 믹싱을 통합하여 일관된 자동조종장치와 수동 오버라이드 믹싱 모드를 제공합니다(고정익 적용).
- 중복 전원공급장치 및 자동 장애 조치
- 외부 안전 스위치
- 다색 LED 주시각 표시기
- 고전력 멀티톤 피에조 오디오 표시기
- 장기간 고속 로깅용 microSD 카드
# 구매처
- The Cube (opens new window) (ProfiCNC)
# 조립
# 사양
- 프로세서:
- STM32F777VI (32 비트 ARM Cortex M7 (opens new window))
- 400 MHz
- 512 KB MB RAM
- 2 MB Flash
- 장애복구 코프러세서:
- STM32F100 (32 비트 ARM Cortex-M3)
- 24 MHz
- 8 KB SRAM
- 센서: (모두 SPI를 통해 연결됨)
- 가속도계: (3) ICM20948, ICM20649, ICM20602
- 자이로스코프: (3) ICM20948, ICM20649, ICM20602
- 나침반: (1) ICM20948
- 기압계: (2) MS5611
- 작동 조건:
- 작동 온도: -10C ~ 55C
- IP 등급/방수: 방수 아님
- 서보 레일 입력 전압: 3.3V / 5V
- USB 포트 입력:
- 전압: 4V - 5.7V
- 정격 전류: 250 mA
- 전원:
- 입력 전압: 4.1V ~ 5.7V
- 정격 입력 전류: 2.5A
- 정격 입/출력 전력: 14W
- 크기:
- Cube: 38.25mm x 38.25mm x 22.3mm
- 캐리어: 94.5mm x 44.3mm x 17.3mm
- 인터페이스
- IO 포트: 14개의 PWM 서보 출력(IO에서 8개, FMU에서 6개)
- UART (직렬 포트) 5개, 1 개의 고전력 지원, 2x (HW 흐름 제어 포함)
- CAN 2개(하나는 내부 3.3V 트랜시버, 하나는 확장 커넥터에 있음)
- RC 입력:
- Spektrum DSM/DSM2/DSM-X® Satellite 호환 입력
- Futaba S.BUS® 호환 입출력
- PPM 합계 신호 입력
- RSSI(PWM 또는 전압) 입력
- I2C
- SPI
- 3.3v ADC 입력
- 내부 microUSB 포트 및 외부 microUSB 포트 확장
# 핀배열과 회로도
보드 설계도와 문서는 The Cube Project (opens new window)를 참고하십시오.
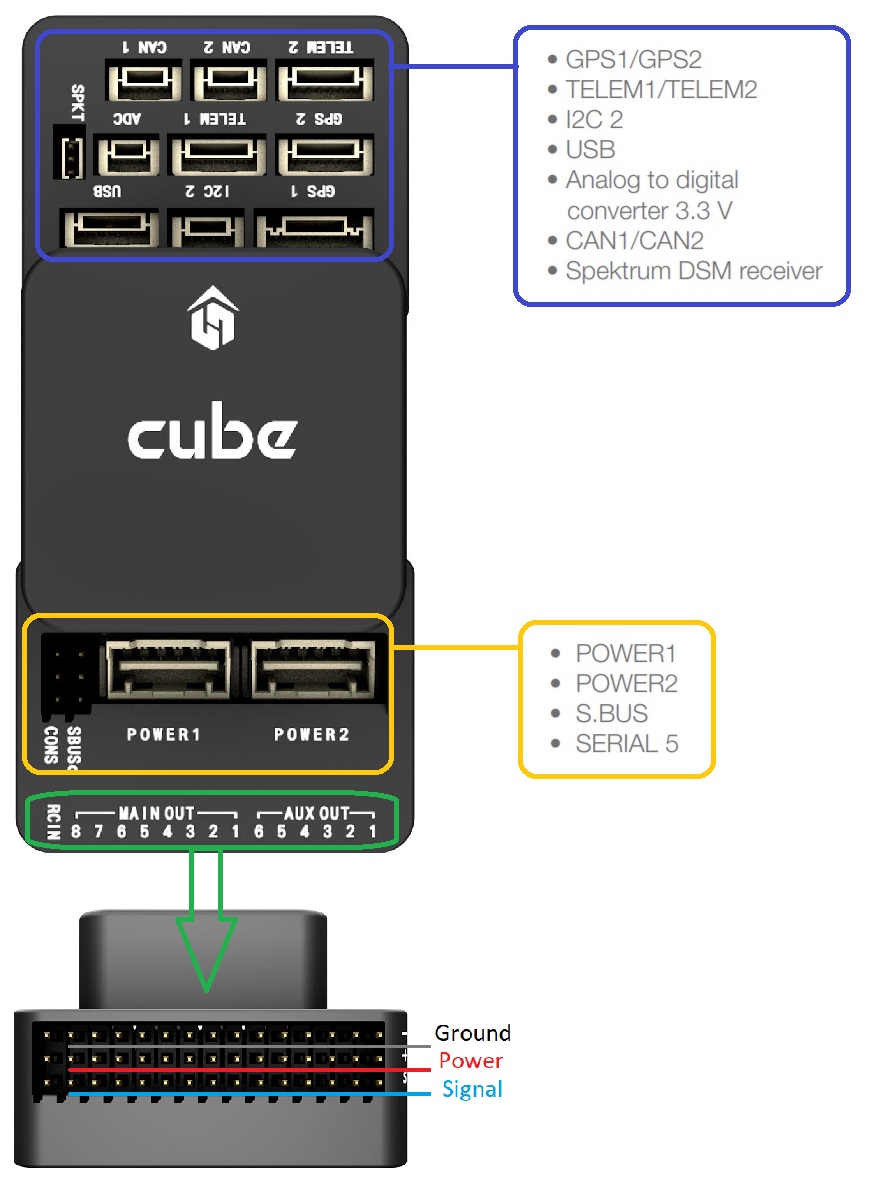
# 포트
# 상단(GPS, TELEM 등)
# 시리얼 포트 매핑
| UART | 장치 | 포트 |
|---|---|---|
| USART1 | /dev/ttyS0 | |
| USART2 | /dev/ttyS1 | TELEM1 (흐름 제어) |
| USART3 | /dev/ttyS2 | TELEM2 (흐름 제어) |
| UART4 | /dev/ttyS3 | GPS1 |
| USART6 | /dev/ttyS4 | PX4IO |
| UART7 | /dev/ttyS5 | 콘솔 |
| UART8 | /dev/ttyS6 | GPS2 |
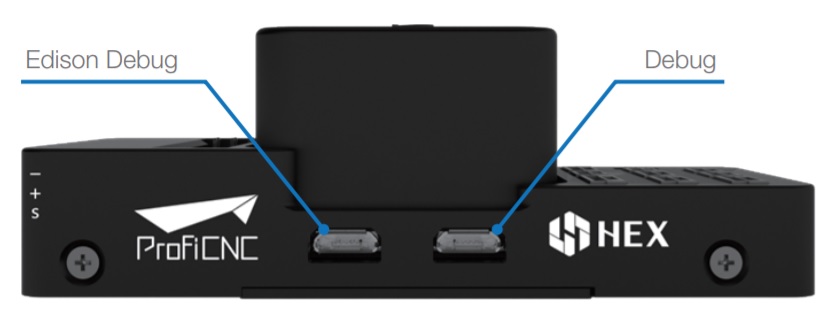
# 디버그 포트
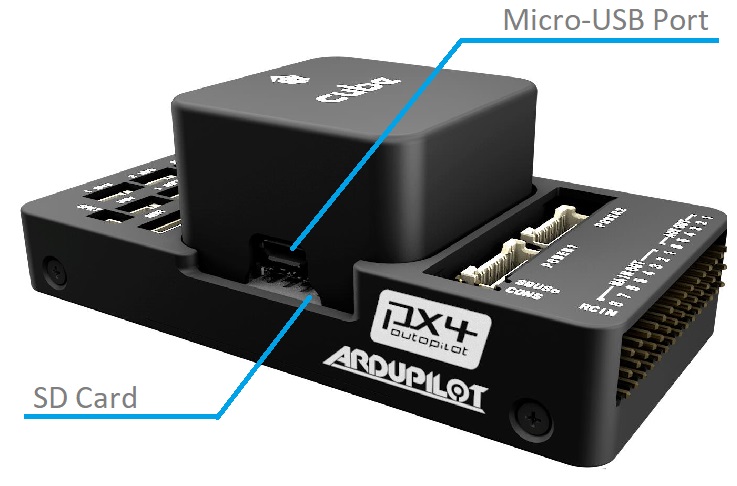
# USB/SDCard 포트