# Holybro Pix32 v5
PX4 does not manufacture this (or any) autopilot. Contact the [manufacturer](https://shop.holybro.com/) for hardware support or compliance issues. 它基于 [Pixhawk 项目](https://pixhawk.org/) 的 **FMUv5** 开放硬件设计,在 [NuttX](http://nuttx.org) 操作系统上运行 PX4。
Pix32 v5 (opens new window)® is an advanced autopilot flight controller designed and made by Holybro®. It is optimized to run on PX4 firmware, which is intended for both academic and commercial developers. It is based on the Pixhawk-project (opens new window) FMUv5 open hardware design and runs PX4 on the NuttX (opens new window) OS. It can be regarded as a variant version of Pixhawk4.
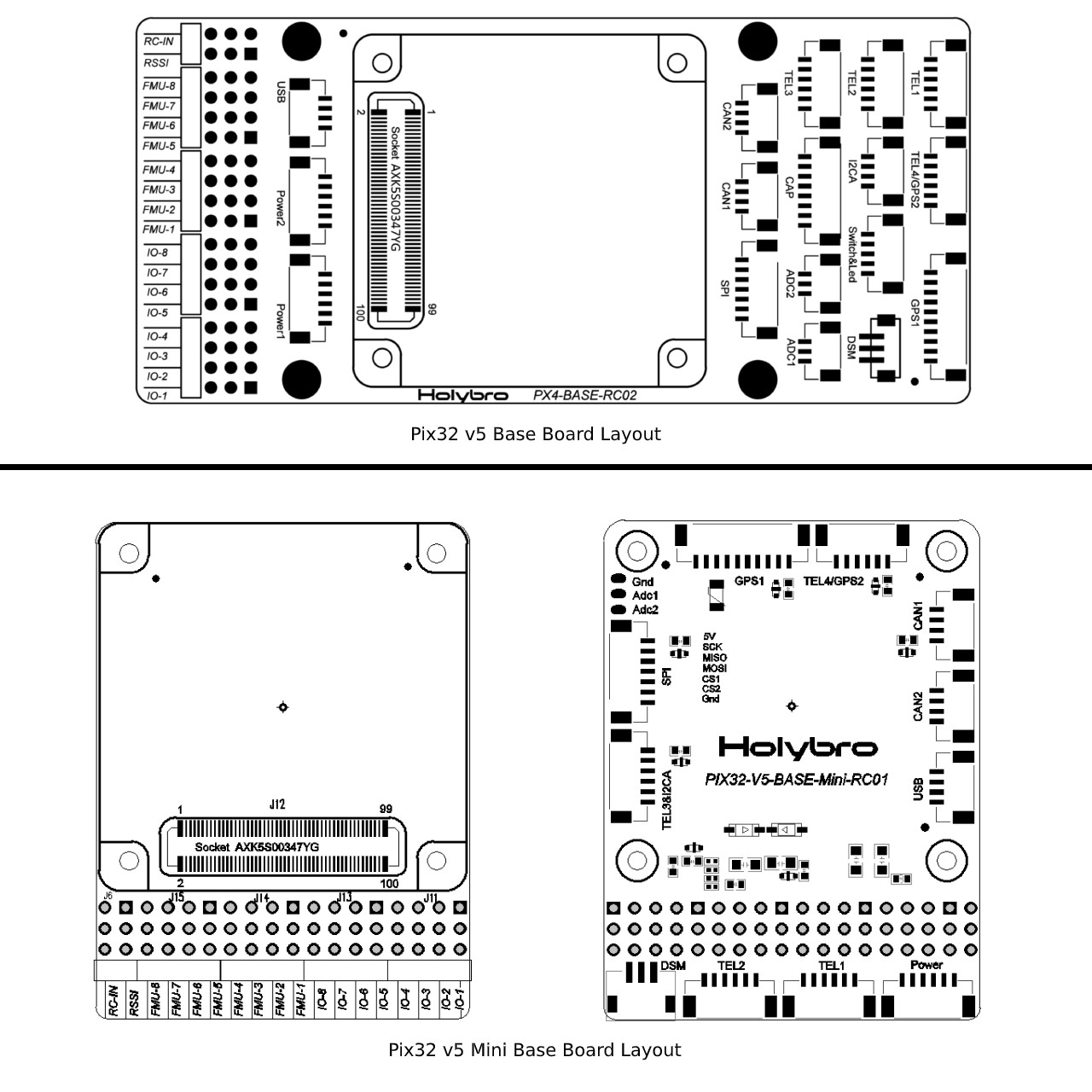
The Pix32 v5 is designed for pilots who need a high power, flexible and customisable flight control system. It is comprised of a separate flight controller and carrier (base) board, which are connected by a 100pin connector. This design allows users to either select a base board made by Holybro, or customize their own.

注解
This flight controller is manufacturer supported.
# 概览
- 主 FMU 处理器:STM32F765
- 32 位 Arm® Cortex®-M7,216MHz,2MB 储存,512KB RAM
- IO 处理器:STM32F100
- 32 位 Arm® Cortex®-M3,24MHz,8KB SRAM
- 板载传感器:
- 加速度计 / 陀螺仪:ICM-20689
- Accel/Gyro: BMI055 or ICM20602
- 磁力计:IST8310
- 气压计:MS5611
- GPS:ublox Neo-M8N GPS/GLONASS 接收器;集成磁力计 IST8310
- 接口:
- 8-16 路PWM输出(8路来自 IO,8路来自 FMU)
- FMU 上有 3 路专用 PWM/Capture 输入
- 用于 CPPM 的专用遥控输入
- Dedicated R/C input for Spektrum / DSM and S.Bus with analog / PWM RSSI input
- Dedicated S.Bus servo output
- 5个通用串行口
- 2 with full flow control
- 1 with separate 1.5A current limit
- 3 个 I2C 接口
- 4路SPI总线
- 1 internal high speed SPI sensor bus with 4 chip selects and 6 DRDYs
- 1 internal low noise SPI bus dedicated for
- Barometer with 2 chip selects, no DRDYs
- 1 internal SPI bus dedicated for FRAM
- Supports dedicated SPI calibration EEPROM located on sensor module
- 1 external SPI buses
- 多达 2 路 CAN 总线用于带串口的电调
- Each CANBus has individual silent controls or ESC RX-MUX control
- 2个电池电流/电压模拟输入口
- 2 additional analog inputs
- Electrical System:
- 电源模块输出:4.9~5.5V
- Max input voltage: 6V
- 最大电流感应:120A
- USB 电源输入:4.75~5.25V
- 伺服导轨输入电压:0~36V
- 重量和尺寸:
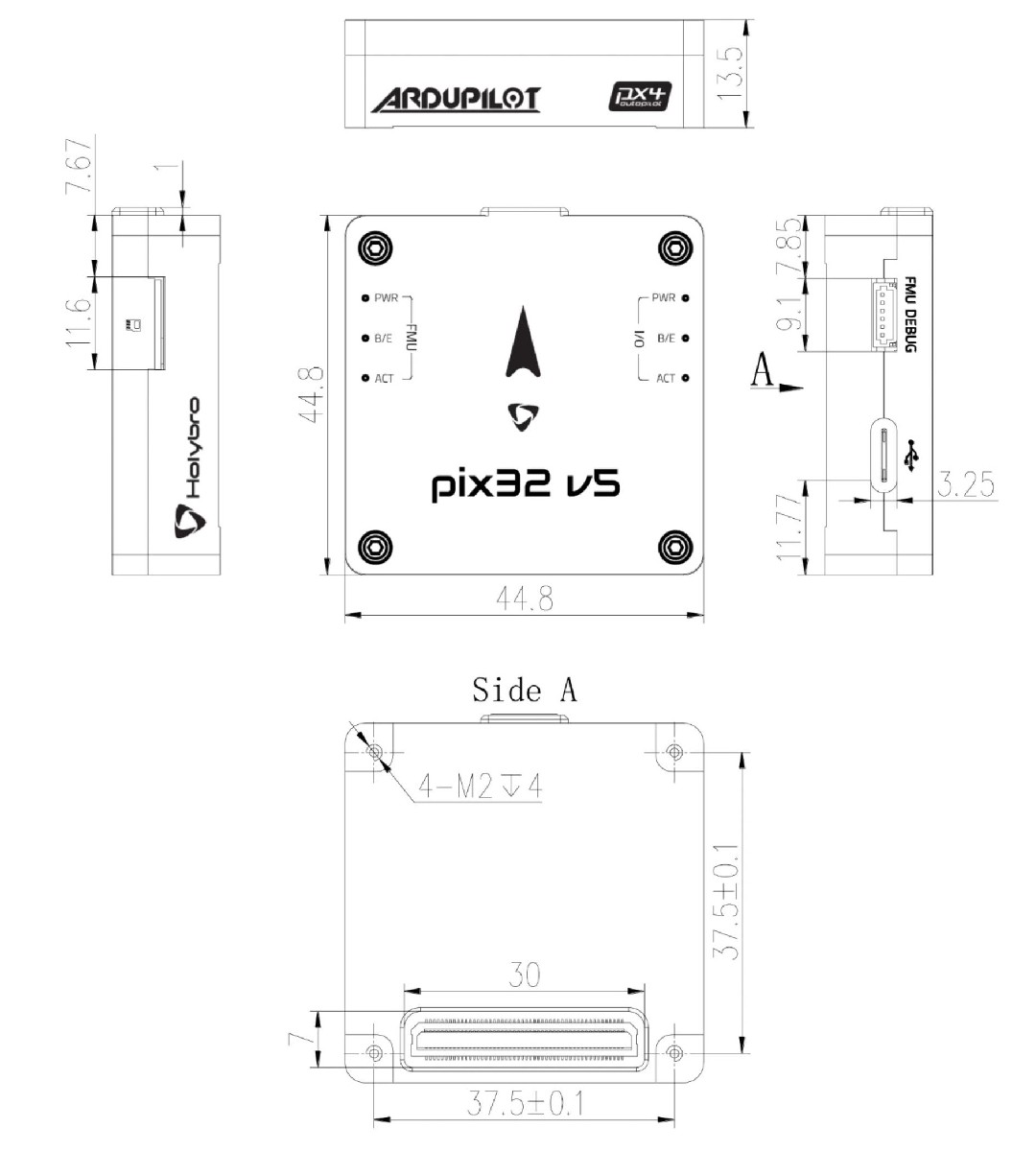
- Dimensions: 45x45x13.5mm
- Weight: 33.0g
- Environmental Data, Quality & Reliability:
- 工作温度:-40 ~ 85°C
- Storage temp. -40~85℃
- CE
- FCC
- RoHS compliant (lead-free)
Additional information can be found in the Pix32 V5 Technical Data Sheet (opens new window).
# 采购
Order from Holybro website (opens new window).
# 组装 / 设置
The Pix32 v5 Wiring Quick Start provides instructions on how to assemble required/important peripherals including GPS, Power Management Board etc.
# Base Board Layouts
# 针脚定义
Download pinouts here:
# 尺寸
# 额定电压
Pix32 v5 can be triple-redundant on the power supply if three power sources are supplied. The three power rails are: POWER1, POWER2 and USB.
注解
The output power rails FMU PWM OUT and I/O PWM OUT (0V to 36V) do not power the flight controller board (and are not powered by it). You must supply power to one of POWER1, POWER2 or USB or the board will be unpowered.
Normal Operation Maximum Ratings
Under these conditions all power sources will be used in this order to power the system:
- POWER1 和 POWER2 输入电压(4.9 v 至 5.5 v)
- USB 输入电压(4.75 v 至 5.25 v)
Absolute Maximum Ratings
Under these conditions the system will not draw any power (will not be operational), but will remain intact.
- POWER1 与 POWER2 输入(可运行范围 4.1V 至 5.7V,0V 至 10V 不会损坏)
- USB 输入(可运行范围 4.1V 至 5.7V,0V 至 6V 不会损坏)
- 舵机输入:FMU PWM OUT 和 I/O PWM OUT 的 VDD_SERVO 针脚 (0V 至 42V 不会损坏)
# 编译固件
提示
Most users will not need to build this firmware! It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
To build PX4 for this target:
make holybro_pix32v5_default
# 调试接口
The system's serial console and SWD interface runs on the FMU Debug port
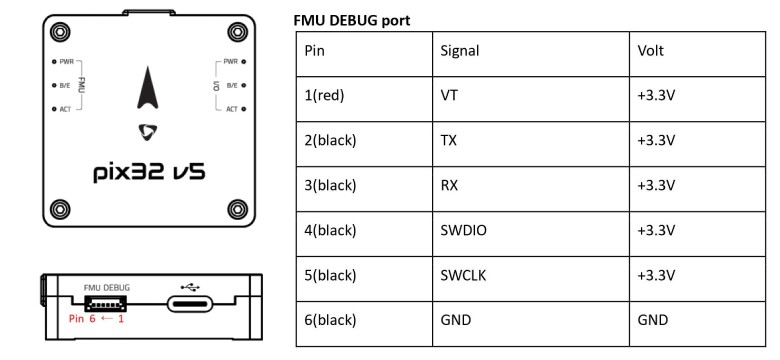
The pinout uses the standard Pixhawk debug connector pinout (opens new window). For wiring information see:
# 外部设备
# 支持的平台 / 机身
Any multicopter / airplane / rover or boat that can be controlled with normal RC servos or Futaba S-Bus servos. The complete set of supported configurations can be seen in the Airframes Reference.