# MindPX Hardware
PX4 does not manufacture this (or any) autopilot. Contact the [manufacturer](http://mindpx.net) for hardware support or compliance issues.
The AirMind® MindPX (opens new window) series is a new generation autopilot system branched from Pixhawk®.

注解
These flight controllers are manufacturer supported.
# 总览
注解
The main hardware documentation is here (opens new window).
MindPX is a new generation autopilot system branched from Pixhawk®, been revised in schematic and structure, and been further enhanced with new features to make un-manned vehicle more smart and more friendly to use.
MindPX increases total PWM output channels to 16 (8 main outputs + 8 aux outputs). This means that MindPX can support more complicated VTOL configurations and more fine control. It is especially meaningful for those FMU-V4 based flight controllers as MindPX implements main and aux output in one single FMU.
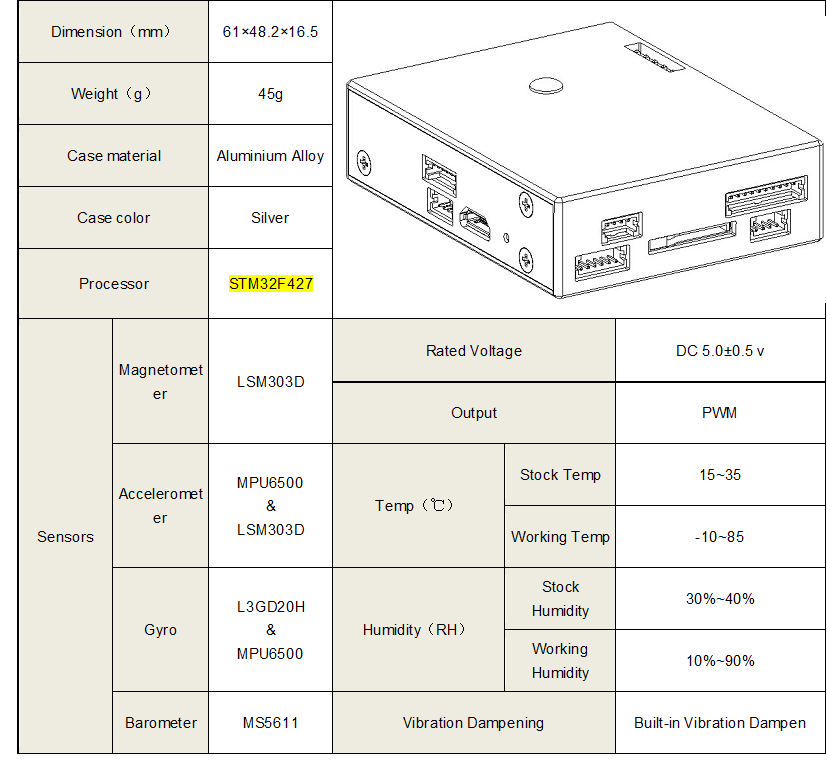
Main System-on-Chip: STM32F427
- CPU: 32bits, 168 MHz ARM Cortex® M4 with FPU
- RAM: 256 KB SRAM
- 2MB Flash
- ST Micro LSM303D 14 bit accelerometer/magnetometer
- MEAS MS5611 气压计
- InvenSense® MPU6500 integrated 6-axis sensors
Highlighted features:
- CNC processed aluminum alloy case, light and solid
- Built-in isolated IMU redundancy
- Total 16 PWM output channel (8 main + 8 aux)
- 1 extra I2C port for flow connection.
- 1 extra USB port for companion computer connection (built-in UART-to-USB converter)
- Exposed debug port for development
# Quick Start
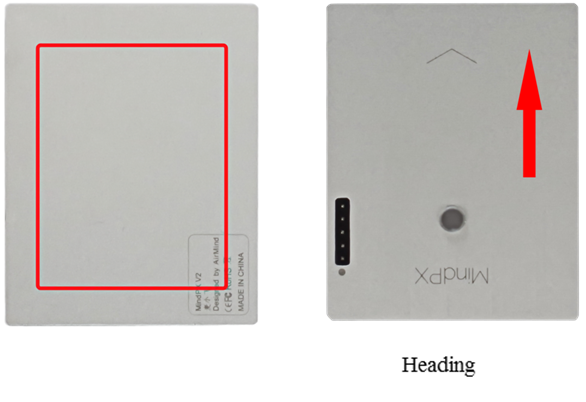
# Mounting
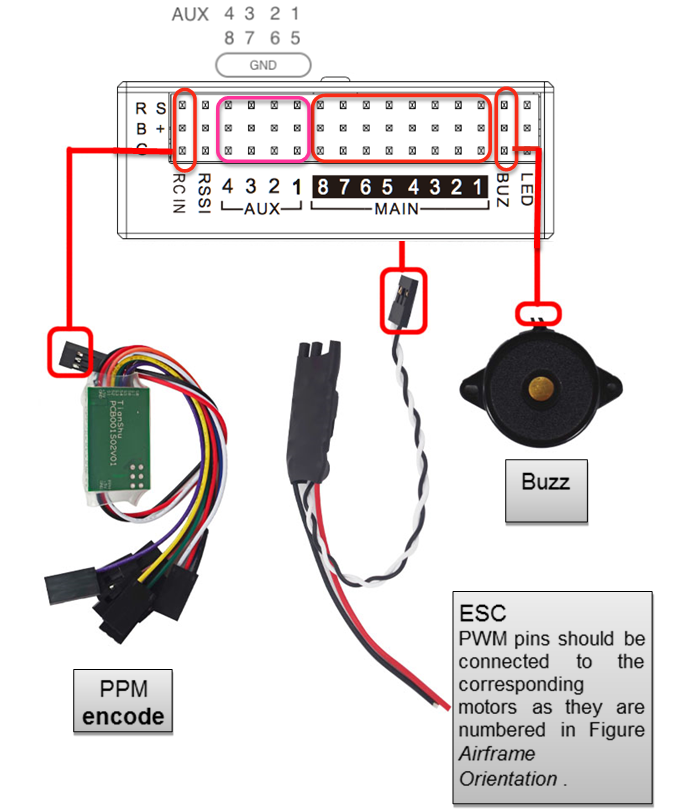
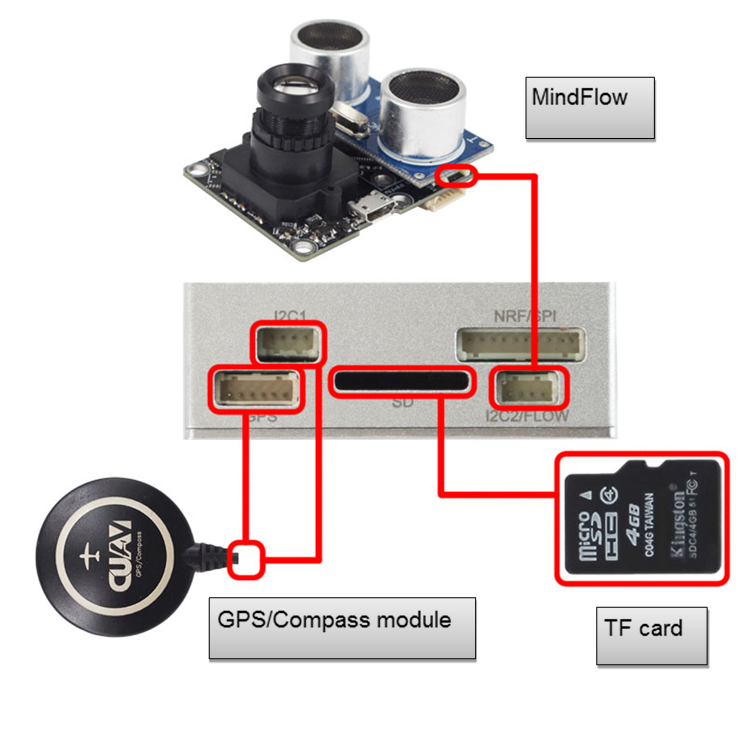
# 布线
# 针脚
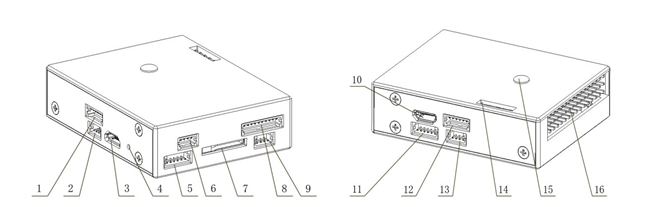
| Num. | 描述 | Num. | 描述 |
|---|---|---|---|
| 1 | 电源 | 9 | I2C2 (MindFLow) |
| 2 | Debug (refresh bootloader) | 10 | USB2 (Serial 2 to USB) |
| 3 | USB1 (refresh firmware) | 11 | UART4,5 |
| 4 | Reset | 12 | UART1 (Telemetry) |
| 5 | UART3 (GPS) | 13 | CAN |
| 6 | I2C1(external compass) | 14 | ADC |
| 7 | TF card slot | 15 | Tricolor Light |
| 8 | NRF/SPI(Remote Control) | 16 | Looper |
# Radio Receiver
MindPX supports a wide variety of radio receivers (since V2.6) including: PPM/SBUS/DSM/DSM2/DSMX. MindPX also support FrSky® bi-direction telemetry D and S.Port.
For detailed Pin diagram, please refer to the User Guide (opens new window).
# 编译固件
提示
Most users will not need to build this firmware! It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
To build PX4 for this target:
make airmind_mindpx-v2_default
# Companion PC connection
MindPX has a USB-TO-UART Bridge IC on the board. A micro-USB to USB type A cable is used for the connection. Connect micro-USB end to the 'OBC' port of MindPX and USB type A end to companion computer.
And the max BAUD rate is the same with px4 family, which is up to 921600.
# User Guide
注解
The user guide is here (opens new window).
# 在哪里买
MindRacer is available at AirMind Store (opens new window) on internet. You can also find MindRacer at Amazon® or eBay®.
# Serial Port Mapping
| UART | 设备 | Port |
|---|---|---|
| USART1 | /dev/ttyS0 | RC |
| USART2 | /dev/ttyS1 | TELEM1 |
| USART3 | /dev/ttyS2 | TELEM2 |
| UART4 | /dev/ttyS3 | GPS1 |
| USART6 | /dev/ttyS4 | ? |
| UART7 | /dev/ttyS5 | Debug Console |
| UART8 | /dev/ttyS6 | ? |
# 技术支持
Please visit http://www.mindpx.org for more information. Or you can send email to support@mindpx.net for any inquiries or help.