# 수동/안정화 모드 (멀티콥터)


수동/안정화모드는 RC 조종 스틱이 중앙에 있을 때 멀티콥터를 안정화합니다. 기체를 수동으로 움직이거나 조종하려면 스틱을 중앙의 바깥쪽으로 제어합니다.
Note
Note
이 멀티콥터 모드는 수동 또는 안정화 모드를 설정하여 활성화됩니다.
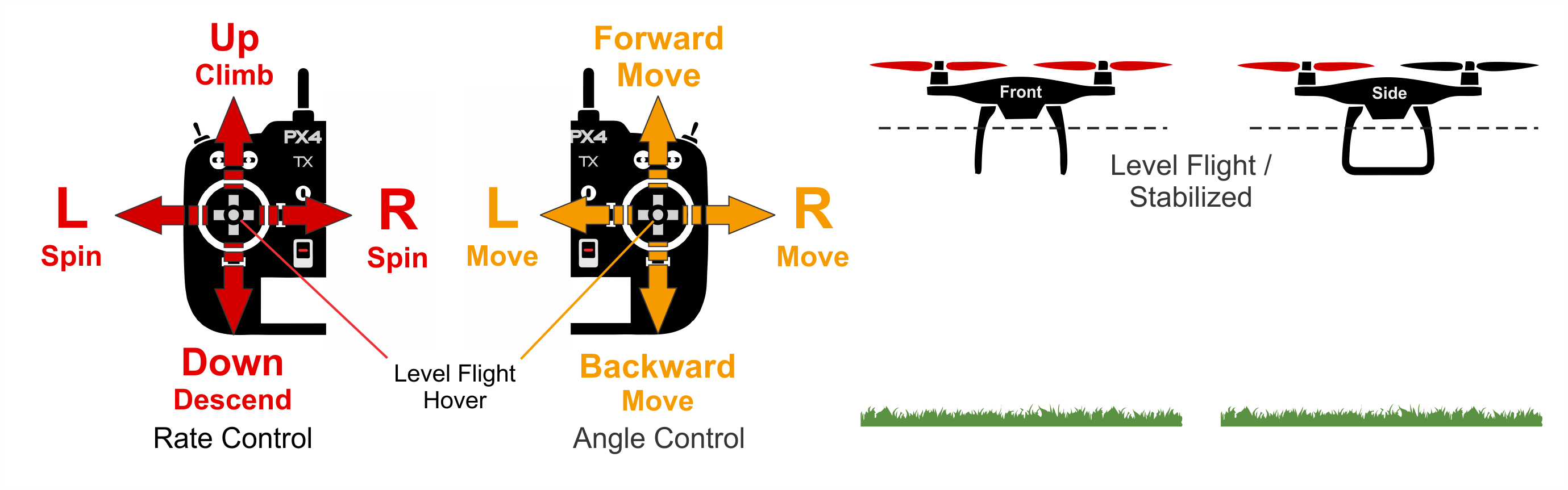
수동 제어에서 롤과 피치 스틱이 각 축을 중심으로 기체의 자세를 * 각도*로 제어하닙니다. 요 스틱은 수평면 위의 회전 속도를 제어하고 스로틀은 고도/속도를 제어합니다 .
조종 스틱을 놓으면 중앙 데드 존으로 돌아갑니다. 롤 포크와 피치 스틱이 중앙에 오면 멀티 피터가 수평을 유지하고 정지합니다. 기체는 적절하게 균형을 잡고, 스로틀이 적절하게 설정되고(아래 참고), 외력이 가해지지 않으면 (예 : 바람), 고도에 유지되거나 유지됩니다. 기체는는 바람 방향으로 표류하게 되며, 고도를 유지하기 위해서는 스로틀을 제어하여야 합니다.
# 기술적 설명
조종사의 입력은 롤 및 피치 각 명령과 요 율 명령으로 전달됩니다. Throttle is rescaled (see below) and passed directly to control allocation. 자동 조종 장치는 자세를 제어합니다. 즉, RC 스틱이 컨트롤러 데드 존 내부에 집중 될 때 롤과 피치 각을 제로로 조절합니다 (결과적으로 태도가 수평이 됨). 자동 조종 장치는 바람 (또는 다른 원인)으로 인한 드리프트를 보상하지 않습니다.
Note
- 수동 입력이 필요합니다 (RC 컨트롤러 또는 MAVLink를 통한 게임 패드/엄지 스틱).
# 매개 변수
| 매개 변수 | 설명 |
|---|---|
| MPC_THR_HOVER | 스로틀 스틱이 중앙에 있고 MPC_THR_CURVE가 기본값으로 설정되어있을 때 출력되는 호버 스로틀입니다. |
| MPC_THR_CURVE | 스로틀 스케일링을 정의합니다. 기본적으로이 값은 호버 추력으로 조정으로 설정되어 있습니다. 즉, 스로틀 스틱이 중앙에있을 때 구성된 호버 스로틀이 출력되고 (MPC_THR_HOVER) 스틱 입력이 선형으로 조정됩니다. 강력한 기체의 경우 호버 스로틀이 매우 낮아 (예 : 20 % 미만) 스로틀 입력이 왜곡 될 수 있습니다. 즉, 여기서 추력의 80 %는 스틱 입력의 상단 절반으로, 하단은 20 %로 제어됩니다. 필요한 경우 MPC_THR_CURVE를 No Rescale로 설정하여 배율을 다시 조정할 수 없습니다 (스로틀 매핑에 대한 스틱 입력은 MPC_THR_HOVER과 무관 함). |