# 광류
광류는 속도 추정을 위하여 하향 카메라와 하향 거리 센서를 사용합니다.
@youtube (opens new window) Video: PX4 holding position using the ARK Flow sensor for velocity estimation (in Position Mode).
# 설정
광류에는 하향 카메라와 거리 센서(LiDAR가 더 좋음)가 필요합니다. 이들은 MAVLink, I2C 또는 다른 버스로 연결 가능합니다.
Note
If connected to PX4 via MAVLink the Optical Flow device must publish to the OPTICAL_FLOW_RAD (opens new window) topic, and the distance sensor must publish to the DISTANCE_SENSOR (opens new window) topic.
다른 방향으로 이동할 때의 흐름 출력은 다음과 같아야합니다.
| 기체 이동 | 통합 흐름 |
|---|---|
| 전방 | + Y |
| 후방 | - Y |
| 우측 | - X |
| 좌측 | + X |
순수 회전의 경우 integrated_xgyro와 integrated_x (각각 integrated_ygyro와 integrated_y)는 동일하여야 합니다.
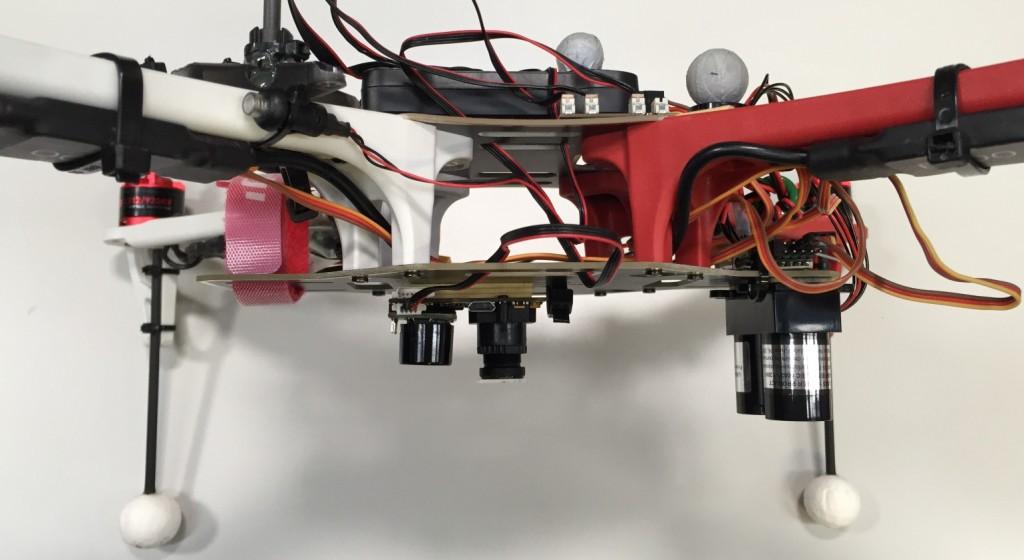
보편적인 설정은 아래와 같은 PX4Flow와 Lidar-Lite입니다.
광류 데이터는 다른 속도 데이터 소스와 융합됩니다. 센서 데이터와 차량 중앙으로부터의 오프셋을 융합 방식은 추정기에서 설정합니다.
# 유량 센서/카메라
# ARK Flow
ARK Flow is a DroneCAN optical flow sensor, distance sensor, and IMU. PAW3902 광학 유량 센서, Broadcom AFBR-S50LV85D 30m 거리 센서 및 BMI088 IMU가 있습니다.
# PMW3901 기반 센서
PMW3901은 컴퓨터 마우스와 유사한 광류 센서이지만, 80mm에서 무한대까지 작동합니다. Bitcraze, Tindie, Hex, Thone 및 Alientek의 일부 제품을 포함하여 여러 제품에 사용됩니다.
# 기타 카메라 / 센서
카메라 통합 보드를 사용할 수 있습니다. Optical Flow repo (opens new window)를 사용할 수도 있습니다 (snap_cam (opens new window) 참조).
# 거리 측정기
더 자세한 정보는 거리 센서를 참고하십시오. 그러나 견고성과 정확성 측면에서는 음향 센서보다 LIDAR를 사용하는 것이 좋습니다.
# 추정기
추정기는 광학 흐름 센서 및 기타 소스의 데이터를 융합합니다. 융합 방법 설정과 차량 중심에 대한 상대적 오프셋이 사용되는 추정기를 지정하여야합니다.
오프셋은 아래와 같이 차량 방향 및 중심을 기준으로 계산됩니다.
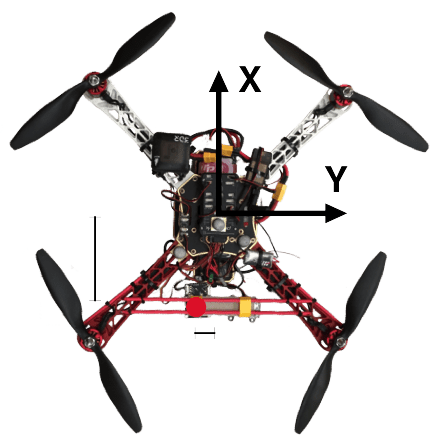
광류 기반 탐색은 EKF2 및 LPE (더 이상 사용되지 않음) 추정기에서 활성화됩니다.
# 확장 칼만 필터 (EKF2)
For optical flow fusion using EKF2, set EKF2_OF_CTRL.
광류 센서가 차량 중앙에서 오프셋된 경우 다음 매개변수를 사용하여 설정합니다.
| 매개변수 | 설명 |
|---|---|
| EKF2_OF_POS_X | 바디 프레임에서 광류 초점의 X 위치 (기본값은 0.0m). |
| EKF2_OF_POS_Y | 바디 프레임에서 광류 초점의 Y 위치 (기본값은 0.0m). |
| EKF2_OF_POS_Z | 바디 프레임에서 광류 초점의 Z 위치 (기본값은 0.0m). |