# FrSky 텔레메트리
FrSky 텔레메트리는 호환 RC 송신기의 기체 텔레메트리 정보에 접근할 수 있습니다.
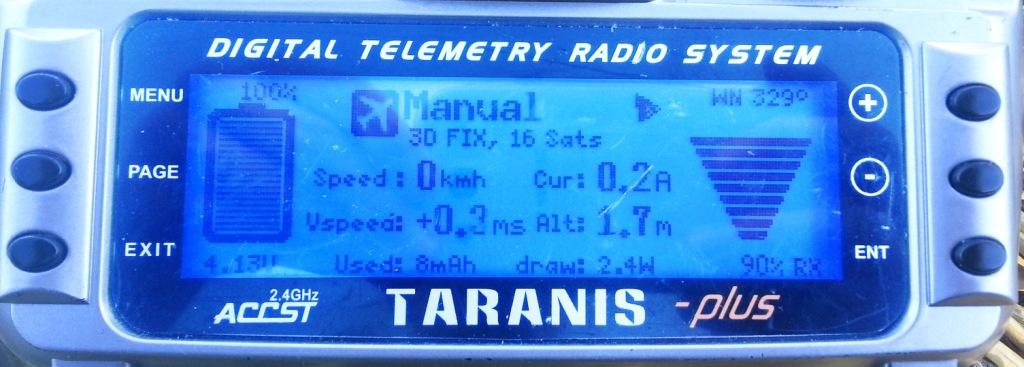
사용 가능한 텔레메트리 목록에는 비행 모드, 배터리 잔량, RC 신호 강도, 속도, 고도 등이 기술되어 있습니다. 일부 송신기는 가청 및 진동 피드백을 추가로 제공 할 수 있으며, 이는 배터리부족과 기타 안전 관련 경고시에 매우 유용합니다.
PX4는 S.Port (신규) 및 D (이전) FrSky 텔레메트리 포트를 모두 지원합니다.
# 하드웨어 설정
FrSky 텔레메트리의 요구사항은 다음과 같습니다.
- FrSky Taranis X9D Plus와 같은 FrSky 호환 RC 송신기.
- XSR와 X8R과 같은 FrSky 텔레메트리 수신기.
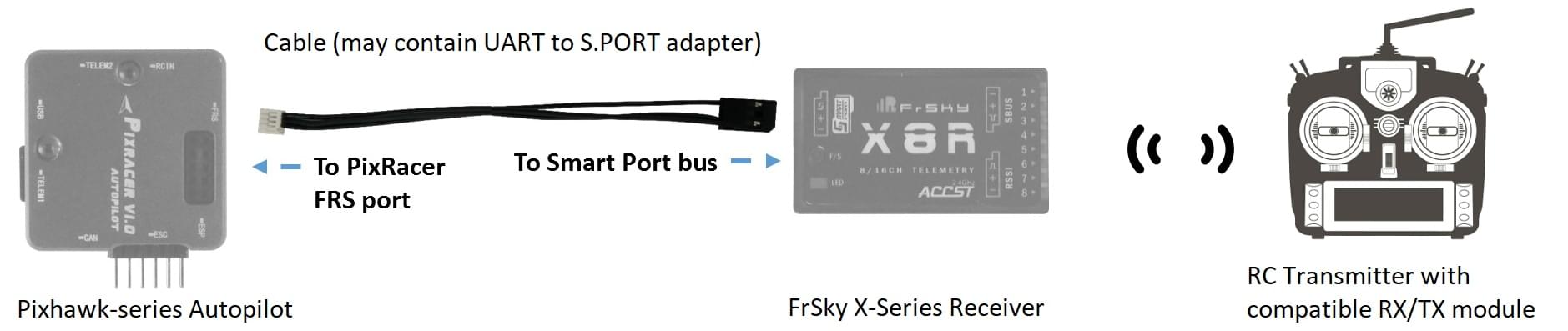
- FrSky 수신기 스마트 포트(SPort)는 비행 콘트롤러 UART에 연결 케이블입니다.
First connect the receiver for RC channels, e.g. connect the S.Bus ports on the receiver and the flight controller.
그런 다음, 수신기의 SPort를 비행 콘트롤러의 무료 UART에 별도로 연결하여 FrSky 텔레메트리를 설정후, 해당 UART에서 FrSky 원격 측정을 실행하도록 PX4를 설정합니다.
이것은 SPort 수신기에 반전되지 않은 출력용 핀 유무와 Pixhawk 버전에 따라 약간 다르게 수행됩니다.
# Pixhawk FMUv4 (및 이전)
Pixhawk FMUv4와 이전 버전의 경우 UART 포트와 수신기 텔레메트리 포트는 일반적으로 호환되지 않습니다 (Pixracer 제외).
일반적으로 SPort 수신기에는 반전 S.Port 신호가 있으며, Pixhawk UART에 연결하려면 변환 케이블을 사용하여 S.Port를 반전되지 않은 TX 및 RX로 분할하여야 합니다. 예시는 다음과 같습니다.
TIP
반전된 S.Port에 연결시에는 일반적으로이 어댑터를 포함하고 자동조종장치 및 수신기에 적합한 커넥터가 있는 케이블을 구매하는 것이 저렴하고 편리합니다. DIY 케이블을 만들려면 전기/전자 조립에 관한 전문적인 지식이 필요합니다.
무반전 출력용 핀이있는 S.Port 수신기에는 UART TX핀 중 하나에 간단히 연결할 수 있습니다.
그런 다음 PX4를 설정합니다.
# Pixhawk FMUv5/STM32F7 이후
Pixhawk FMUv5와 이후 버전에서는 PX4는 반전된(또는 반전되지 않은) S.Port 신호를 직접 읽을 수 있으며, 특별한 케이블이 필요하지 않습니다.
Note
보다 일반적으로 이것은 STM32F7 이상을 사용하는 자동 조종 장치에서 해당됩니다 (예 : Durandal에는 STM32H7이 있으며 반전되거나 반전되지 않은 S.Port 신호를 직접 읽을 수 있음).
UART의 TX핀중 하나를 SPort 반전 또는 비반전 핀에 연결하면됩니다 (PX4는 두 유형 중 하나를 자동으로 감지합니다). 그런 다음 PX4를 설정합니다.
# PX4 설정
TEL_FRSKY_CONFIG를 사용하여 FrSky 실행 모듈 직렬 포트를 설정합니다. 포트 전송속도는 드라이버에 의해 설정되므로, 추가로 설정하지 않아도 됩니다.
Note
보다 일반적으로 이것은 STM32F7 이상을 사용하는 자동 조종 장치에서 해당됩니다 (예 : Durandal에는 STM32H7이 있으며 반전되거나 반전되지 않은 S.Port 신호를 직접 읽을 수 있음).
Note
QGroundControl에서 설정 매개변수를 사용할 수 없는 경우에는 펌웨어에 드라이버를 추가하여야 합니다.
drivers/telemetry/frsky_telemetry
추가 설정이 필요하지 않습니다. FrSky 텔레메트리는 연결되면 자동으로 시작되고 D 또는 S 모드를 감지합니다.
# 호환 RC 송신기
텔레메트리 스트림을 수신 기능한 (FrSky 수신기에 바인딩된) RC 송신기가 필요합니다.
많이 사용되는 제품들은 다음과 같습니다.
- FrSky Taranis X9D Plus (추천)
- FrSky Taranis X9D
- FrSky Taranis X9E
- FrSky Taranis Q X7
- Turnigy 9XR Pro
위의 송신기는 추가 설정없이, 텔레메트리 데이터를 출력합니다. 다음 섹션에서는 텔레메트리 디스플레이를 설정 방법(예 : 더 나은 UI/UX 생성)을 설명합니다.
# Taranis - LuaPilot 설정
OpenTX 2.1.6 이상을 실행하는 Taranis 호환 수신기(예 : X9D Plus)는 LuaPilot 스크립트를 사용하여 원격 측정 출력을 수정할 수 있습니다 (아래 스크린 샷 참조).
스크립트 설치 방법은 LuaPilot Taranis Telemetry 스크립트 > Taranis Setup OpenTX 2.1.6 이상 (opens new window)을 참고하십시오.
텍스트 편집기로 LuaPil.lua 스크립트를 열어 설정을 편집할 수 있습니다. 제안된 수정 사항은 다음과 같습니다.
local BattLevelmAh = -1- 기체 배터리 잔량을 계산합니다.local SayFlightMode = 0- PX4 비행 모드 WAV 파일이 없습니다.
# 텔레메트리 메시지
FrSky Telemetry는 PX4 유용한 상태 정보 대부분을 전송합니다. S-Port 및 D-Port 수신기는 다음 섹션에 나열된대로 서로 다른 메시지 세트를 전송합니다.
# S-Port
S-Port 수신기는 PX4(여기 (opens new window)에서)에서 다음 메시지들을 전송합니다.
- AccX, AccY, AccZ: 가속도
- Alt: 홈 위치를 기준 기압계 기반 고도.
- Curr: 실제 전류 소비 (Amps).
- Fuel:
battery_capacity변수 세트 및 변수smartport_fuel_percent = ON인 경우 남은 배터리 비율, 그렇지 않으면 mAh가 표시됩니다. - GAlt: GPS 고도, 해수면은 0입니다.
- GPS: GPS 좌표.
- GSpd: GPS로 계산된 현재 수평 지면속도입니다.
- Hdg: 방향 (도-북쪽은 0 °).
- VFAS: 실제 배터리 전압(Voltage FrSky Ampere Sensor).
- VSpd: 수직 속도 (cm/s).
- Tmp1: 비행 모드, 정수로 전송 : 18 - Manual, 23 - Altitude, 22 - Position, 27 - Mission, 26 - Hold, 28 - Return, 19 - Acro, 24 0 오프 보드, 20 - 안정화됨, 25 - 이륙, 29 - Land, 30 - Follow Me.
- Tmp2: GPS 정보. 가장 오른쪽 숫자는 GPS 수정 유형입니다 (0 = 없음, 2 = 2D, 3 = 3D). 다른 숫자는 위성의 수입니다.
Note
다음 "표준" S-Port 메시지는 PX4에서 지원되지 않습니다 : ASpd, A4.
# D-port
D-Port 수신기는 다음 메시지를 전송합니다 (여기 (opens new window)에서).
- AccX, AccY, AccZ: 가속도
- Alt: 기압계 기반 고도, 초기화 수준은 0입니다.
- 셀: 평균 셀 전압 (배터리 전압을 셀 번호로 나눈 값).
- Curr: 실제 전류 소비 (Amps).
- Fuel: 용량이 설정된 경우 남은 배터리 비율, 그렇지 않으면 mAh가 표시됩니다.
- Date: 전원 공급 이후 시간입니다.
- GAlt: GPS 고도, 해수면은 0입니다.
- GPS: GPS 좌표.
- GSpd: GPS로 계산된 현재 속도입니다.
- Hdg: 방향 (도-북쪽은 0 °).
- RPM: 장착된 경우 스로틀 값, 그렇지 않으면 배터리 용량. Taranis에서 블레이드 번호는 12로 설정하여야 합니다.
- Tmp1: 비행 모드 (S-Port의 경우).
- Tmp2: GPS 정보 (S-Port의 경우).
- VFAS: 실제 배터리 전압(Voltage FrSky Ampere Sensor).
- VSpd: 수직 속도 (cm/s).
# FrSky 텔레메트리 수신기
Pixhawk/PX4는 D (이전) 및 S (신규) FrSky 텔레메트리를 지원합니다. 아래 표는 D/S.PORT 텔레메트리를 지원하는 FrSky 수신기들입니다 (이론상 모두 작동함).
TIP
아래 나열된 X 시리즈 수신기를 권장합니다 (예 : XSR, X8R). R 및 G 시리즈는 테스트팀에 의해 검증되지 않았지만 작동하여야 합니다.
| 수신기 | 범위 | 복합 출력 | 디지털 텔레메트리 입력 | 크기 | 중량 |
|---|---|---|---|---|---|
| D4R-II | 1.5km | CPPM (8) | D.Port | 40x22.5x6mm | 5.8g |
| D8R-XP | 1.5km | CPPM (8) | D.Port | 55x25x14mm | 12.4g |
| D8R-II Plus | 1.5km | 없음 | D.Port | 55x25x14mm | 12.4g |
| X4R | 1.5km | CPPM (8) | Smart Port | 40x22.5x6mm | 5.8g |
| X4R-SB | 1.5km | S.Bus (16) | Smart Port | 40x22.5x6mm | 5.8g |
| X6R / S6R | 1.5km | S.Bus (16) | Smart Port | 47.42×23.84×14.7mm | 15.4g |
| X8R / S8R | 1.5km | S.Bus (16) | Smart Port | 46.25 x 26.6 x 14.2mm | 16.6g |
| XSR / XSR-M | 1.5km | S.Bus (16) / CPPM (8) | Smart Port | 26x19.2x5mm | 3.8g |
| RX8R | 1.5km | S.Bus (16) | Smart Port | 46.25x26.6x14.2mm | 12.1g |
| RX8R PRO | 1.5km | S.Bus (16) | Smart Port | 46.25x26.6x14.2mm | 12.1g |
| R-XSR | 1.5km | S.Bus (16) / CPPM (8) | Smart Port | 16x11x5.4mm | 1.5g |
| G-RX8 | 1.5km | S.Bus (16) | Smart Port + integrated vario | 55.26178mm | 5.8g |
| R9 | 10km | S.Bus (16) | Smart Port | 43.3x26.8x13.9mm | 15.8g |
| R9 slim | 10km | S.Bus (16) | Smart Port | 43.3x26.8x13.9mm | 15.8g |
Note
위의 표는 http://www.redsilico.com/frsky-receiver-chart 및 FrSky 제품 문서 (opens new window)에서 참조하였습니다.
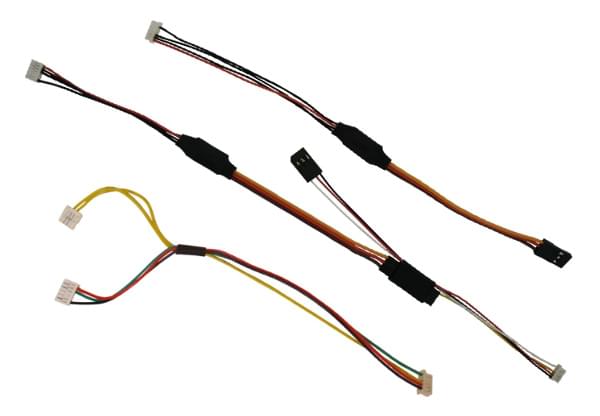
# 기성품 케이블
Pixhawk FMUv4와 이전 버전 (Pixracer 제외)의 기성품 케이블은 아래에서 구매가능합니다.
Craft and Theory (opens new window). 버전은 DF-13 호환 PicoBlade 커넥터(FMUv2/3DR Pixhawk, FMUv2/HKPilot32 용) 및 JST-GH 커넥터(FMUv3/Pixhawk 2, "The Cube" 및 FMUv4/PixRacer v1 용)와 함께 제공됩니다.
# DIY 케이블
자신만의 어댑터 케이블을 만들 수 있습니다. 자동조종장치에 적합한 커넥터(예 : FMUv3/Pixhawk 2 "The Cube" 및 FMUv4/PixRacer v1 용 JST-GH 커넥터 및 DF-13 호환 PicoBlade 커넥터 이전 자동 조종 장치의 경우).
Pixracer에는 S.PORT와 UART 간의 신호 변환 장치가 포함되어 있지만, 다른 보드의 경우 UART-S.PORT 어댑터가 필요합니다. 아래에서 구매 가능합니다.
- FrSky FUL-1 (opens new window): unmannedtech.co.uk (opens new window)
- SPC: getfpv.com (opens new window), unmannedtechshop.co.uk (opens new window)
다른 보드에서의 연결 방법은 아래에 기술되어 있습니다.
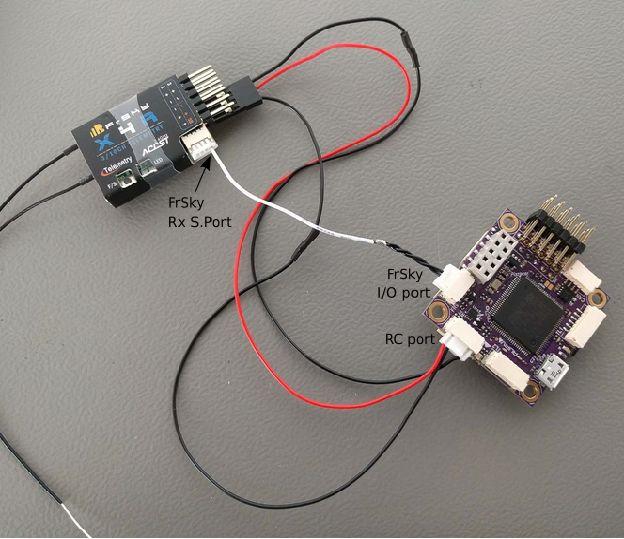
# Pixracer to S-port 변환 수신기
Pixracer FrSky TX와 RX 라인을 X 시리즈 수신기의 S.port 핀에 함께 연결합니다 (전선을 함께 납땜). GND는 S.Bus(일반 RC 연결)에 연결시 수행되므로 연결할 필요가 없습니다.
S-port 연결은 아래와 같습니다 (제공된 I/O 커넥터 사용).

# Pixracer to D-port 변환 수신기
TIP
대부분의 사용자는 S.PORT를 선호합니다.
Pixracer FrSky TX 라인 (FS 출력)을 수신기의 RX 라인에 연결합니다. Pixracer FrSky RX 라인 (FS 입력)을 수신기 TX 라인에 연결합니다. GND는 RC/SBus (일반 RC의 경우)에 연결할 때 수행되므로 연결할 필요 없습니다.
# Pixhawk Pro
Pixhawk 3 Pro는 TELEM4에 연결할 수 있습니다 (추가 소프트웨어 설정 필요없음). UART-S.PORT 어댑터나 기성품 케이블로 연결하여 합니다.
# Pixhawk FMUv5 이후
UART의 TX핀중 하나를 SPort 반전 또는 비반전 핀에 연결하면됩니다 (PX4는 두 유형 중 하나를 자동으로 감지합니다).
# 기타 보드
대부분의 다른 보드는 TELEM2 UART를 통해 FrSky 텔레메트리 수신기에 연결합니다. 여기에는 Pixhawk 1, mRo Pixhawk, Pixhawk2 등이 포함됩니다.
UART-S.PORT 어댑터나 기성품 케이블로 연결하여 합니다.
# 추가 정보
추가 정보는 다음 링크를 참고하십시오.