# Pix32 v5 Wiring Quick Start
PX4 does not manufacture this (or any) autopilot. Contact the [manufacturer](https://holybro.com/) for hardware support or compliance issues.
This quick start guide shows how to power the Holybro Pix32v5® flight controller and connect its most important peripherals.
# Unboxing
Pix32 v5 is sold bundled with a number of different combinations of accessories, including the pix32 v5 Base board, power module PM02 V3, and the Holybro M8N GPS (opens new window) (UBLOX NEO-M8N).
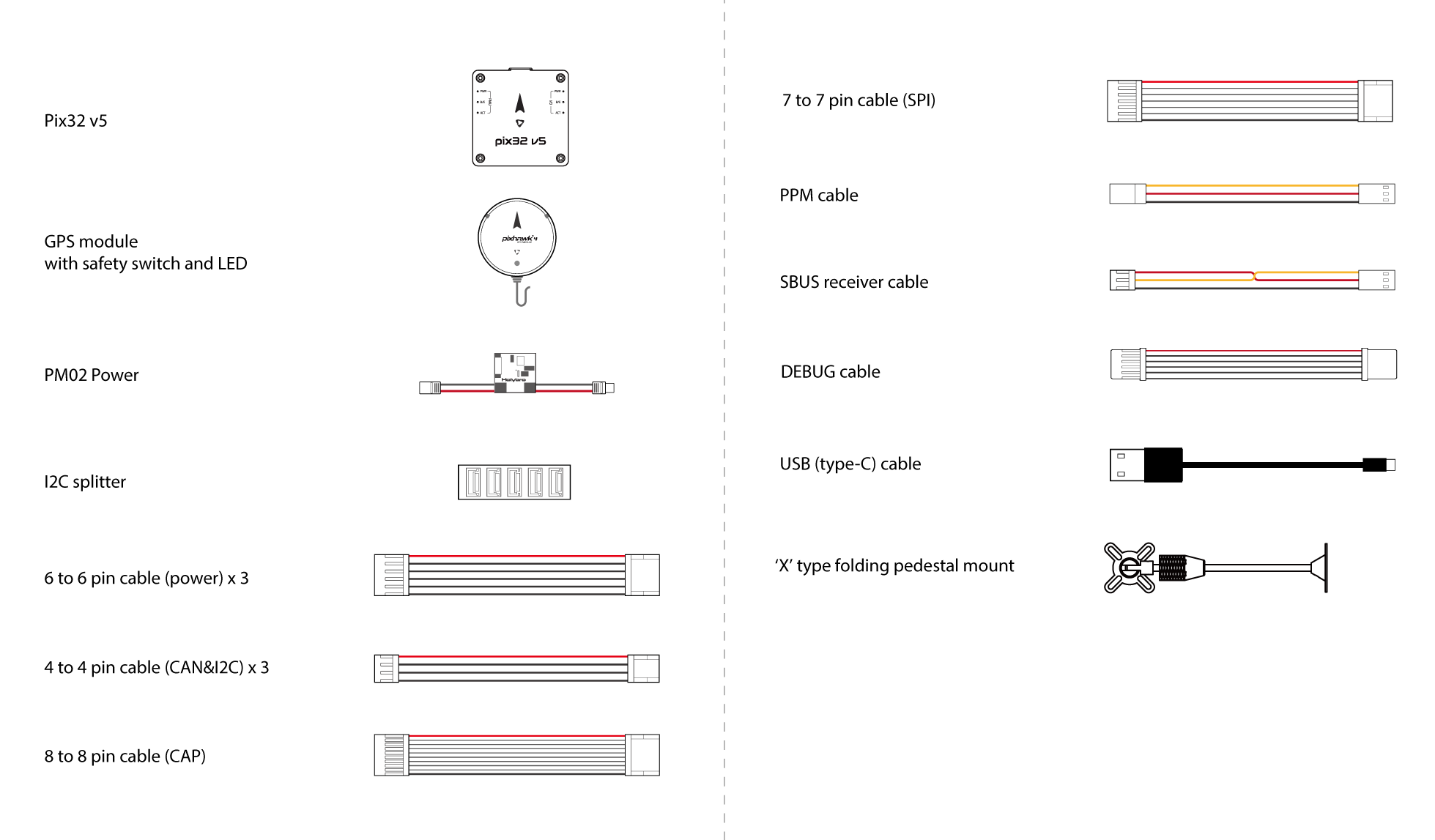
The content of the box with the PM02 V3 power module and Pixhawk 4 GPS/Compass is shown below. The box also includes a pinout guide and power module instructions, and Base board (not shown on the schematic below).
# 接线图概述
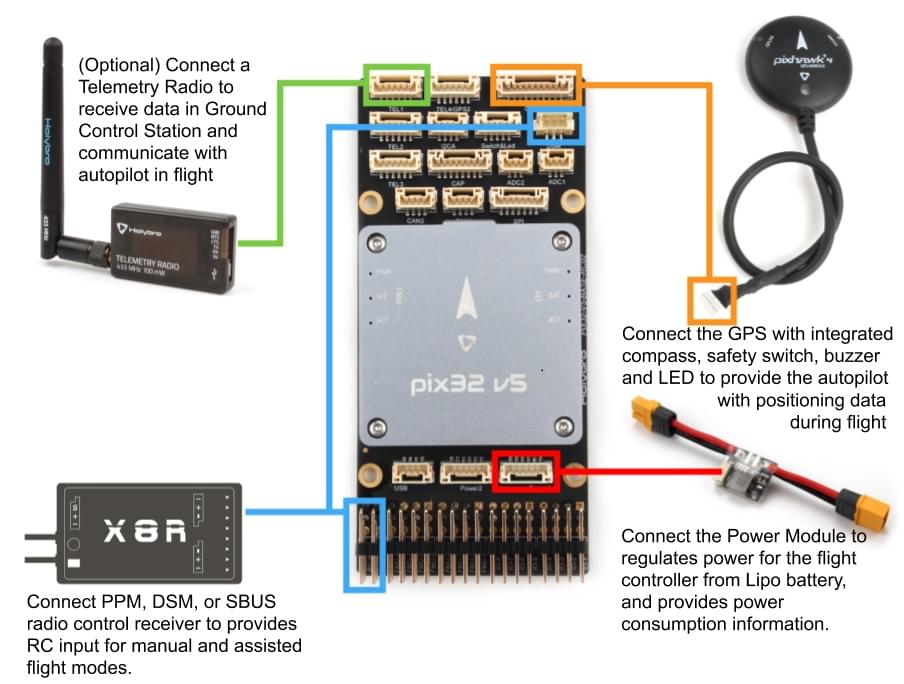
The image below shows how to connect the most important sensors and peripherals (except the motor and servo outputs). We'll go through each of these in detail in the following sections.
提示
More information about available ports can be found here (opens new window).
# 飞控的安装和方向
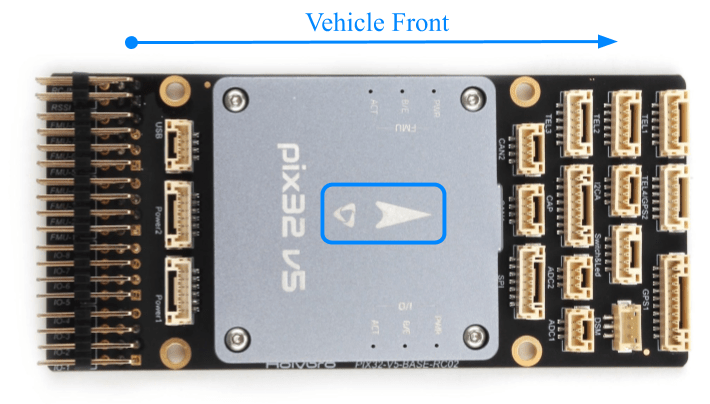
Pix32 v5 should be mounted on the frame positioned as close to your vehicle’s center of gravity as possible, oriented top-side up with the arrow pointing towards the front of the vehicle.
注解
If the controller cannot be mounted in the recommended/default orientation (e.g. due to space constraints) you will need to configure the autopilot software with the orientation that you actually used: Flight Controller Orientation.
提示
The board has internal vibration-isolation. Do not use vibration-isolation foam to mount the controller (double sided tape is normally sufficient).
# GPS + 指南针 + 蜂鸣器 + 安全开关 + LED
Pix32 v5 is designed to work well with the Holybro M8N GPS (opens new window), which has an integrated compass, safety switch, buzzer and LED. It connects directly to the GPS port using the 10 pin cable.
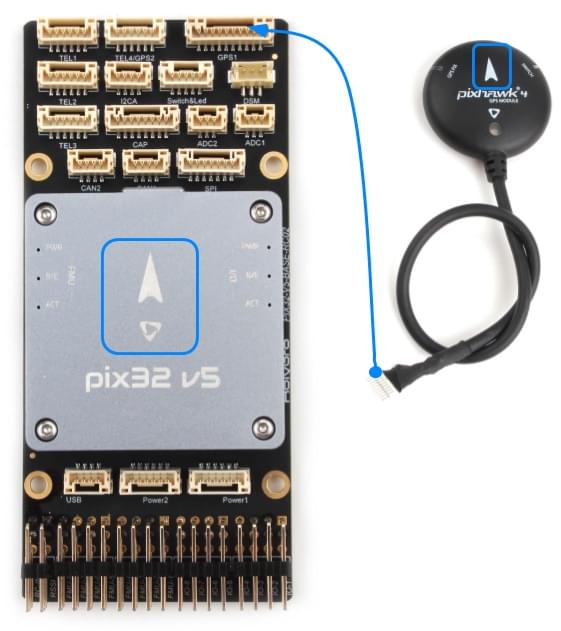
The GPS/Compass should be mounted on the frame as far away from other electronics as possible, with the direction marker towards the front of the vehicle (separating the compass from other electronics will reduce interference).
注解
The GPS module's integrated safety switch is enabled by default (when enabled, PX4 will not let you arm the vehicle). To disable the safety press and hold the safety switch for 1 second. You can press the safety switch again to enable safety and disarm the vehicle (this can be useful if, for whatever reason, you are unable to disarm the vehicle from your remote control or ground station).
# 电源
You can use a power module or power distribution board to power motors/servos and measure power consumption. The recommended power modules are shown below.
# PM02 v3 Power Module
The Power Module (PM02 v3) can be bundled with pix32 v5. It provides regulated power to flight controller and sends battery voltage/current to the flight controller.
如果你想手动控制你的飞机,你需要一个遥控器(PX4在自动飞行模式可以不需要遥控器)。
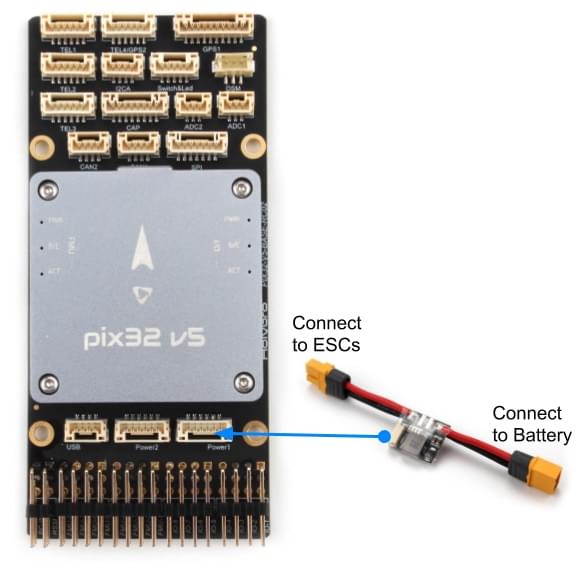
- PM voltage/current port: connect to POWER1 port (or
POWER2) using the 6-wire GH cable supplied. - PM input (XT60 male connector): connect to the LiPo battery (2~12S).
- PM power output (XT60 female connector): wire out to any motor ESCs.
注解
As this power module does not include power distribution wiring, you would normally just connect all the ESCs in parallel to the power module output (the ESC must be appropriate for the supplied voltage level).
注解
The 8 pin power (+) rail of MAIN/AUX is not powered by the power module supply to the flight controller. If it will need to be separately powered in order to drive servos for rudders, elevons etc., the power rail needs to be connected to a BEC equipped ESC or a standalone 5V BEC or a 2S LiPo battery. Ensure the voltage of servo you are going to use is appropriate.
遥测无线电台可用于地面站的通信和飞行控制 (例如, 您可以指定无人机飞行至特定位置, 或上传新的任务)。
- Max input voltage: 60V
- Max current sensing: 120A Voltage
- Current measurement configured for SV ADC Switching regulator outputs 5.2V and 3A max
- Weight: 20g
- Package includes:
- PM02 board
- 6pin MLX cable (1)
- 6pin GH cable (1)
# Battery Configuration
The battery/power setup must be configured in Power Settings. For either Power Module you will need to configure the Number of Cells.
You will not need to update the voltage divider unless you are using some other power module (e.g. the one from the Pixracer).
# 遥控器
A remote control (RC) radio system is required if you want to manually control your vehicle (PX4 does not require a radio system for autonomous flight modes).
You will need to select a compatible transmitter/receiver and then bind them so that they communicate (read the instructions that come with your specific transmitter/receiver).
The instructions below show how to connect the different types of receivers to Pix32 v5 with Baseboard:
Spektrum/DSM receivers connect to the DSM RC input shown below.
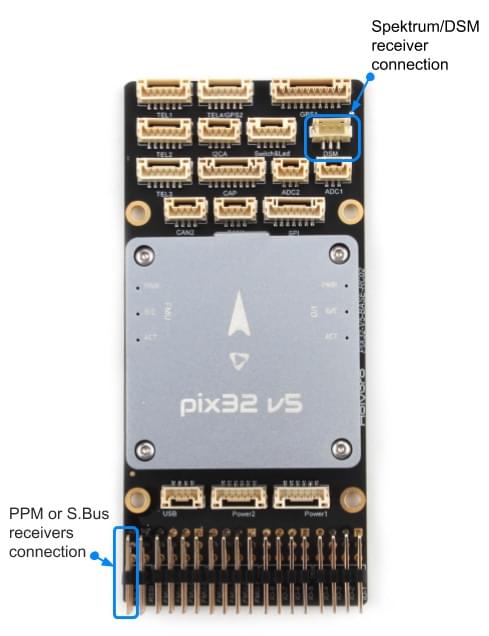
PPM and S.Bus receivers connect to the SBUS_IN/PPM_IN input port (marked as RC IN):
PPM 和 每个通道有单独连接线 的 PWM 接收机需要连接在 PPM RC 端口,PWM信号需要通过一个类似这样的 (opens new window)* PPM 编码器*(PPM-Sum 接收机只需要一根信号线就包含所有通道)。
For more information about selecting a radio system, receiver compatibility, and binding your transmitter/receiver pair, see: Remote Control Transmitters & Receivers.
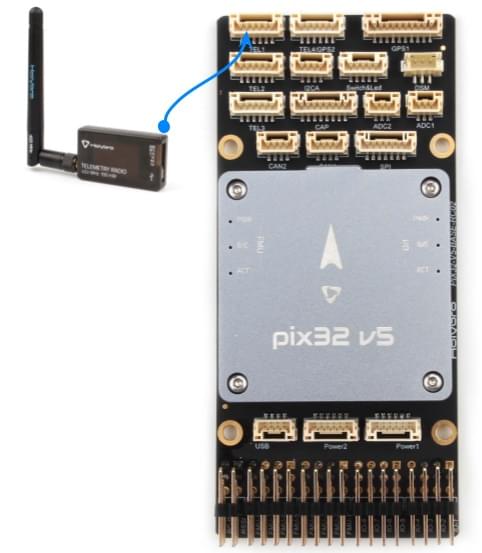
# Telemetry Radios (Optional)
Telemetry radios may be used to communicate and control a vehicle in flight from a ground station (for example, you can direct the UAV to a particular position, or upload a new mission).
The vehicle-based radio should be connected to the TELEM1 port as shown below (if connected to this port, no further configuration is required). The other radio is connected to your ground station computer or mobile device (usually by USB).
# SD 卡
SD cards are most commonly used to log and analyse flight details. A micro SD card should come preinstalled on the pix32 v5, if you have your own micro SD card, insert the card into pix32 v5 as shown below.

提示
The SanDisk Extreme U3 32GB is highly recommended.
# 电机
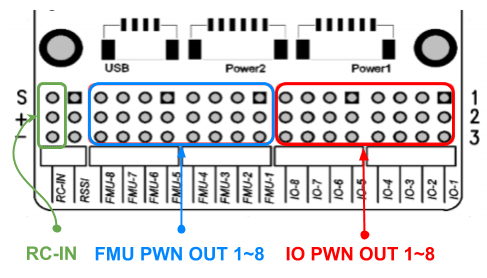
Motors/servos control signals are connected to the I/O PWM OUT (MAIN) and FMU PWM OUT (AUX) ports in the order specified for your vehicle in the Airframe Reference.
The motors must be separately powered.
注解
If your frame is not listed in the airframe reference then use a "generic" airframe of the correct type.
# 其它外设
The wiring and configuration of optional/less common components is covered within the topics for individual peripherals.
# 针脚定义
Pix32 v5 Pinouts (opens new window) (Holybro)
# 配置
General configuration information is covered in: Autopilot Configuration.
QuadPlane specific configuration is covered here: QuadPlane VTOL Configuration