# 环绕模式 (多旋翼)

")
The Orbit guided flight mode allows you to command a multicopter (or VTOL in multicopter mode) to fly in a circle, by default (opens new window) yawing so that it always faces towards the center.

QGroundControl (or other compatible GCS or MAVLink API) is required to enable the mode, and to set the center position, initial radius and altitude of the orbit. 一旦启用后,无人机将尽快飞到控制的圆周轨迹上的最近点,并在规划的圆周上朝中心方向缓慢(1 m/s)顺时针旋转。
Instructions for how to start an orbit can be found here: FlyView > Orbit Location (opens new window) (QGroundControl guide).
注解
The use of an RC control is optional. 如果没有遥控,则环绕模式如上所述。 无法使用遥控来启动该模式(如果使用遥控切换该模式,无人机会处于空闲状态)。
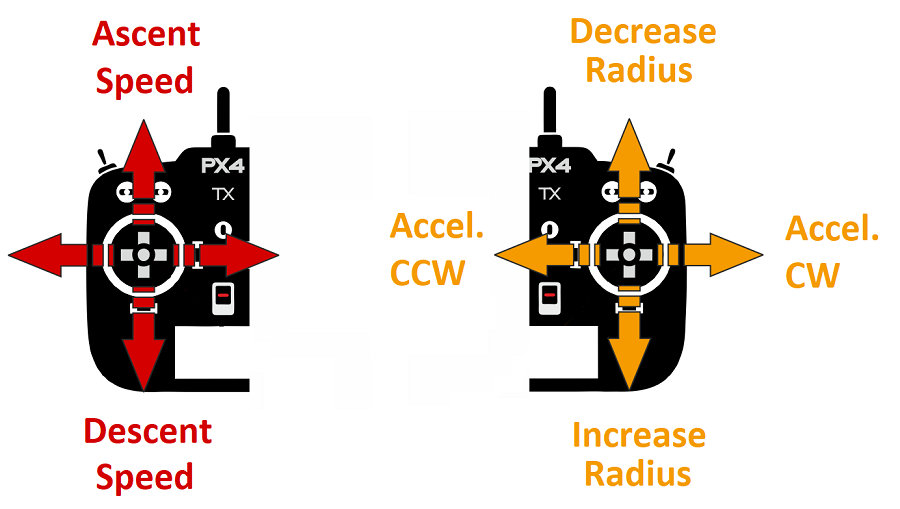
遥控可以用于改变绕圈的高度,半径,速度和绕圈方向:
- 左摇杆:
- up/down: controls speed of ascent/descent, as in Position mode. 当在中部死区时,高度被锁定。
- left/right: no effect.
- 右摇杆:
- left/right: controls acceleration of orbit in clockwise/counter-clockwise directions. 当居中时,当前速度被锁定。
- 最大速度为 10 m/s,进一步的限制是将向心加速度保持在 2 m/s^2 以下。
- up/down: controls orbit radius (smaller/bigger). 当居中时,当前半径被锁定。
- 最小半径是 1 米。 最大半径是 100 米。
- left/right: controls acceleration of orbit in clockwise/counter-clockwise directions. 当居中时,当前速度被锁定。
下图直观的显示了模式行为(对于一个模式 2 发送器)。
切换到其他飞行模式(使用遥控或 QGC 地面站)可以停止此模式。
# 参数/限制
没有特定的环绕模式参数。
下面的限制是写死的:
- 初始/默认是顺时针方向 1 m/s 旋转。
- 最大加速度限制在 2 2 m/s^2,优先保持控制的圆周轨迹而不是地速(即, 如果加速度超过 2 m/s^2,无人机将减速以达到正确的圆周)。
- 最大半径是 100 米。
# MAVLink 消息 (开发者)
环绕模式使用以下 MAVLink 命令:
- MAV_CMD_DO_ORBIT (opens new window) - 启动一个指定中心点,半径,方向,高度,速度和偏航方向 (opens new window)的轨道(无人机默认朝向轨道中心)。
- ORBIT_EXECUTION_STATUS (opens new window) - 在轨道模式发出的轨道状态,以更新当前轨道参数的 GCS(可以由遥控改这些参数)。