# DJI Matrice 100 (Pixhawk 1)
DJI ® Matrice 쿼드콥터는 커스터마이징과 프로그래밍이 가능한 비행 플랫폼입니다. 3DR Pixhawk 비행 컨트롤러를 이용한 기체의 조립 방법과 설정 방법을 설명합니다.
주요 정보:
- 기체: DJI Matrice 100
- 비행 컨트롤러: Pixhawk 1

# 부품 목록
* [DJI Matrice 100] (http://store.dji.com/product/matrice-100) ESC 모터와 프레임만 있습니다.
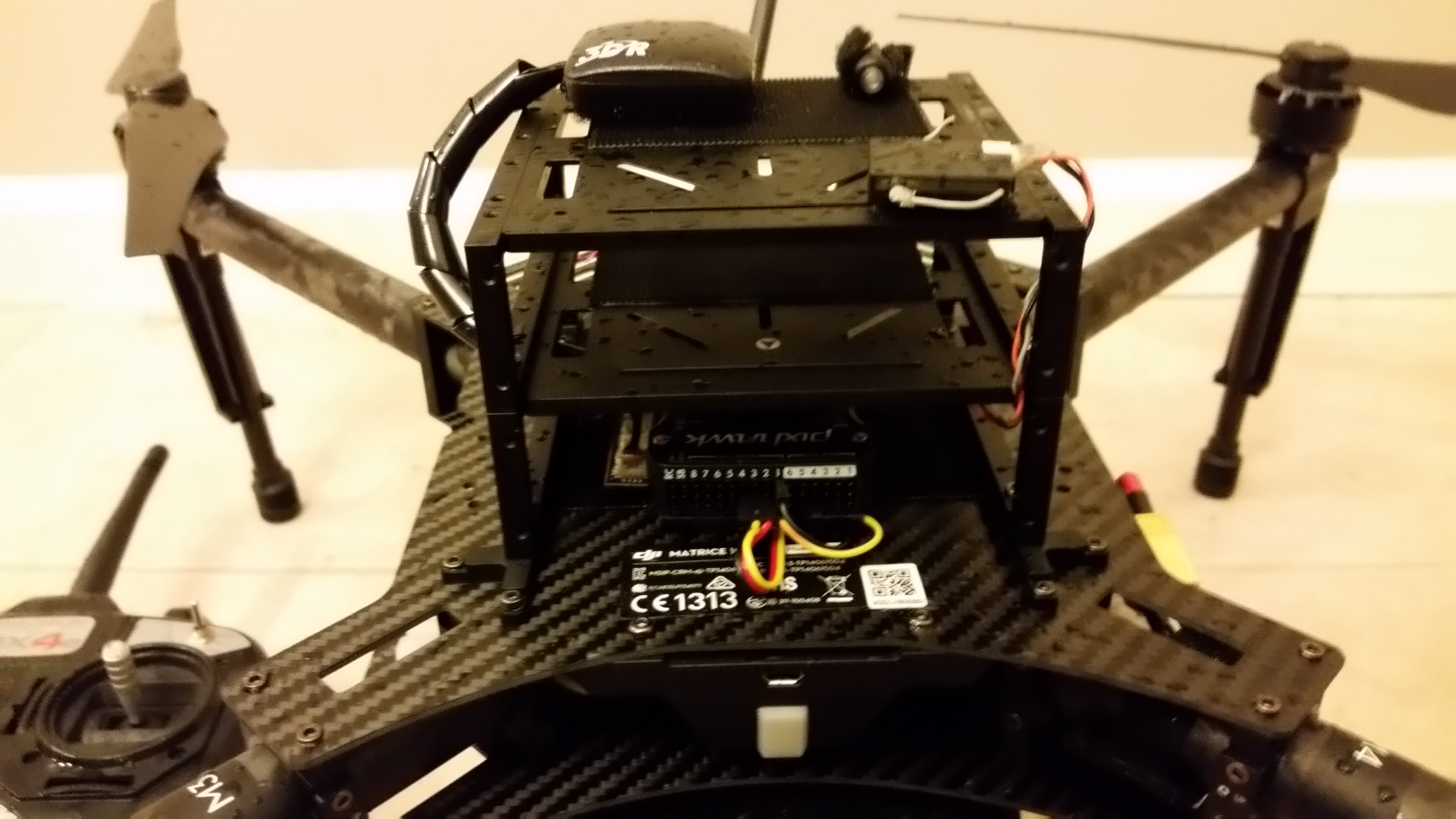
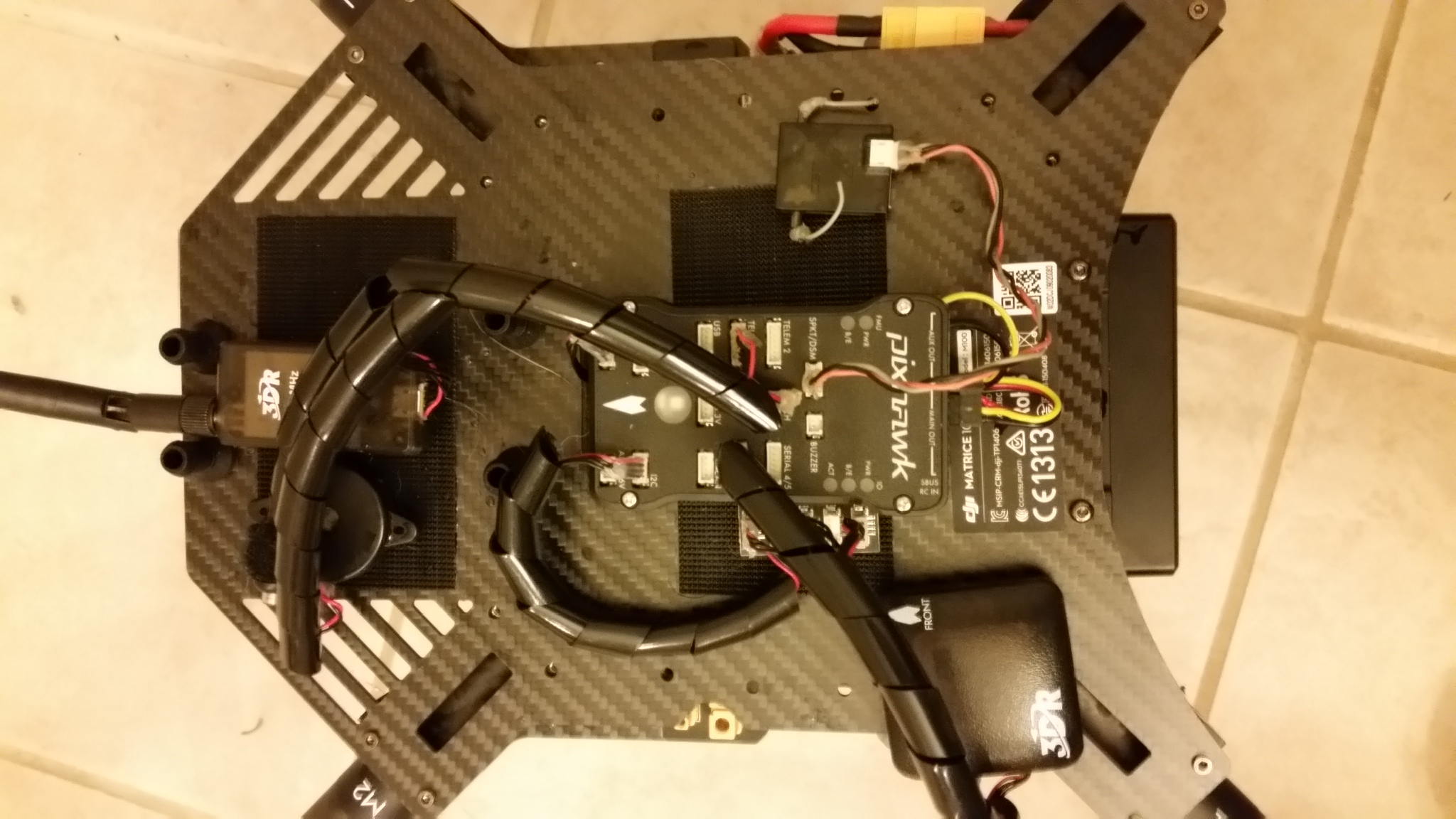
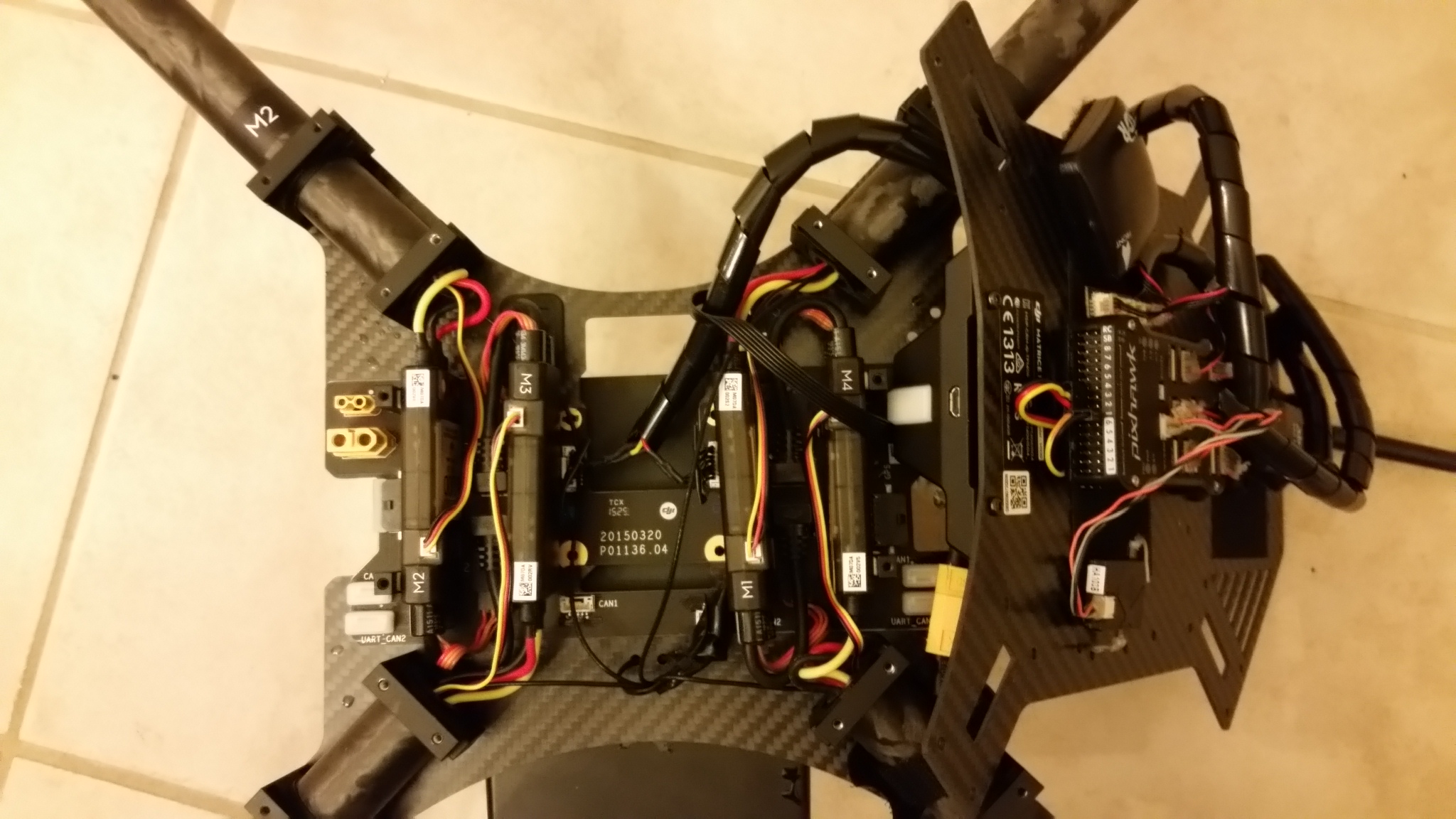
# 모터 연결
자동조종장치 조립 방법은 Pixhawk Wiring Quickstart를 참조하십시오.
# 배선 다이어그램

# 배선 하네스

# PWM 연결

# 기타

# 자동조종장치 출력
| 출력 | 주파수 | 액추에이터 |
|---|---|---|
| MAIN1 | 400 Hz | 전방 우측, 반시계 방향 |
| MAIN2 | 400 Hz | 후방 촤즉, 반시계 방향 |
| MAIN3 | 400 Hz | 전방 좌측, 시계방향 |
| MAIN4 | 400 Hz | 후방 우측, 시계 방향 |
| AUX1 | 50 Hz | RC AUX1 |
| AUX2 | 50 Hz | RC AUX2 |
| AUX3 | 50 Hz | RC AUX3 |
# 매개 변수
- 높은 스로틀에서 내부 루프는 기본값의 4 배 이득으로 진동을 유발합니다. 낮은 스로틀에서 높은 게인은 더 나은 응답을 제공합니다. 이는 스로틀을 기반으로하는 일부 게인 스케줄링이 전체 응답을 향상시킬 수 있으며, 이는 mc_att_control에서 구현될 수 있음을 의미합니다. 지금은 낮은 스로틀이나 높은 스로틀에서 진동이 없도록 조정하고, 낮은 스로틀에서 대역폭을 조정합니다.
- MC_PITCHRATE_P: 0.05
- MC_PITCHRATE_D: 0.001
- 배터리에는 기본 3셀 대신 6 개의 셀이 있습니다.
- BAT_N_CELLS: 6