# DroPix Flight Controller
PX4 does not manufacture this (or any) autopilot. Contact the [manufacturer](https://store.drotek.com/) for hardware support or compliance issues.
The Drotek® DroPix autopilot is based on the Pixhawk®-project (opens new window) FMUv2 open hardware design. It runs the PX4 Flight Stack on the NuttX (opens new window) OS.
The DroPix system includes integrated multithreading, a Unix/Linux-like programming environment, completely new autopilot functions such as Lua scripting of missions and flight behavior, and a custom PX4 driver layer ensuring tight timing across all processes.
注解
This flight controller is manufacturer supported.
# 主要特性
- Advanced 32 bit ARM Cortex® M4 Processor running NuttX RTOS
- 14 PWM/servo outputs (8 with failsafe and manual override, 5 auxiliary, high-power compatible)
- Abundant connectivity options for additional peripherals (UART, I2C, CAN)
- Integrated backup system for in-flight recovery and manual override with dedicated processor and stand-alone power supply
- Backup system integrates mixing, providing consistent autopilot and manual override mixing modes
- Redundant power supply inputs and automatic failover
- External safety button for easy motor activation
- Multicolor LED indicator
- High-power, multi-tone piezo audio indicator
- microSD card for long-time high-rate logging
- 传感器
- ST Micro L3GD20 3-axis 16-bit gyroscope
- ST Micro LSM303D 3-axis 14-bit accelerometer / magnetometer
- Invensense® MPU 6000 3-axis accelerometer/gyroscope
- MEAS MS5611 气压计
- Standard MK style mounting holes 45 mm x 45 mm (M3 holes)
- 尺寸
- Size: 67506 mm
- Weight: 15g (without connectors)
# Where to buy
DroPix Autopilots & Accessories (opens new window)
# 文档
DroPix User's Guide (opens new window)
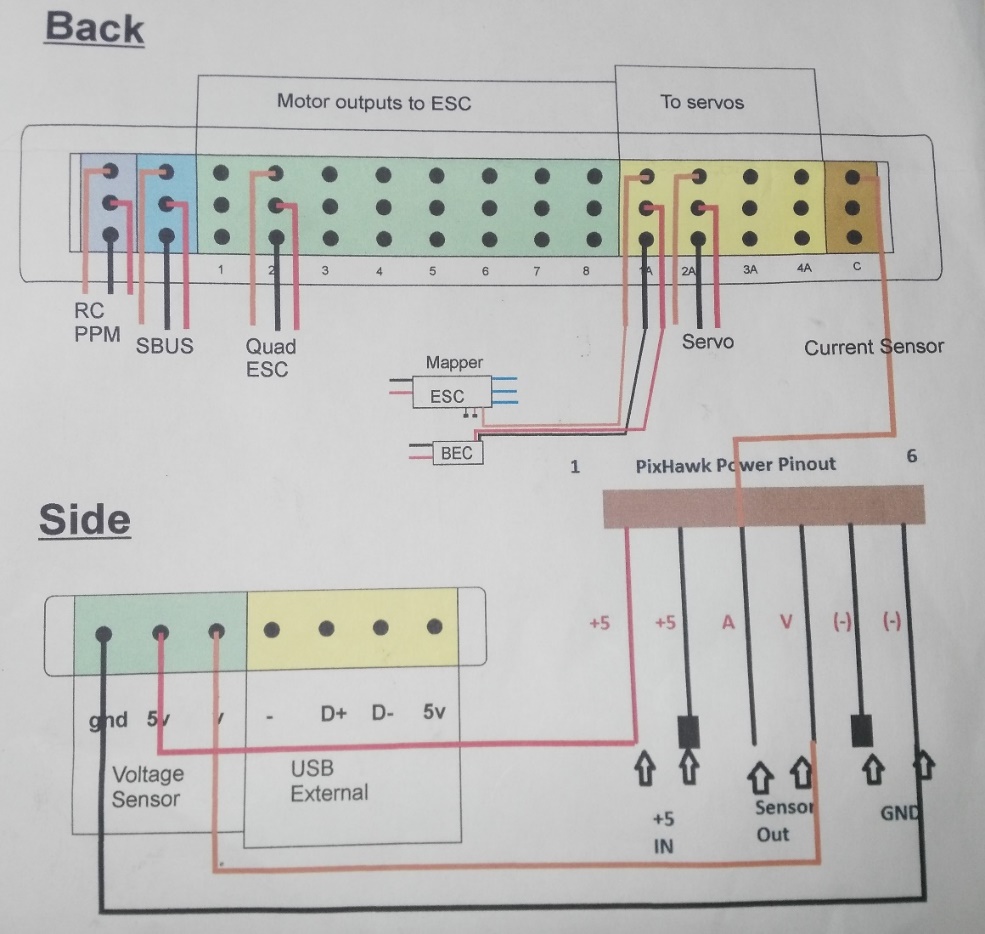
# 接线指南
The following diagrams show the Dropix connector information (for more information see the drotek documentation (opens new window)).

# 编译固件
提示
Most users will not need to build this firmware! It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
To build PX4 for this target:
make px4_fmu-v2_default
# Serial Port Mapping
| UART | 设备 | Port |
|---|---|---|
| UART1 | /dev/ttyS0 | IO debug |
| USART2 | /dev/ttyS1 | TELEM1 (flow control) |
| USART3 | /dev/ttyS2 | TELEM2 (flow control) |
| UART4 | ||
| UART7 | CONSOLE | |
| UART8 | SERIAL4 |