# Spedix S250AQ
The Spedix S250 is a asymmetric racing quadcopter perfectly suited for the Pixracer autopilot.
# 硬件
The hardware required for this build is displayed below.

# Mounting and Wiring
Connect GPS and the Wifi module as shown in the Pixracer instructions.
Connect the motors in the layout and order defined in the Airframe Reference, and as reproduced below.

| 常规输出接法 |
|---|
|
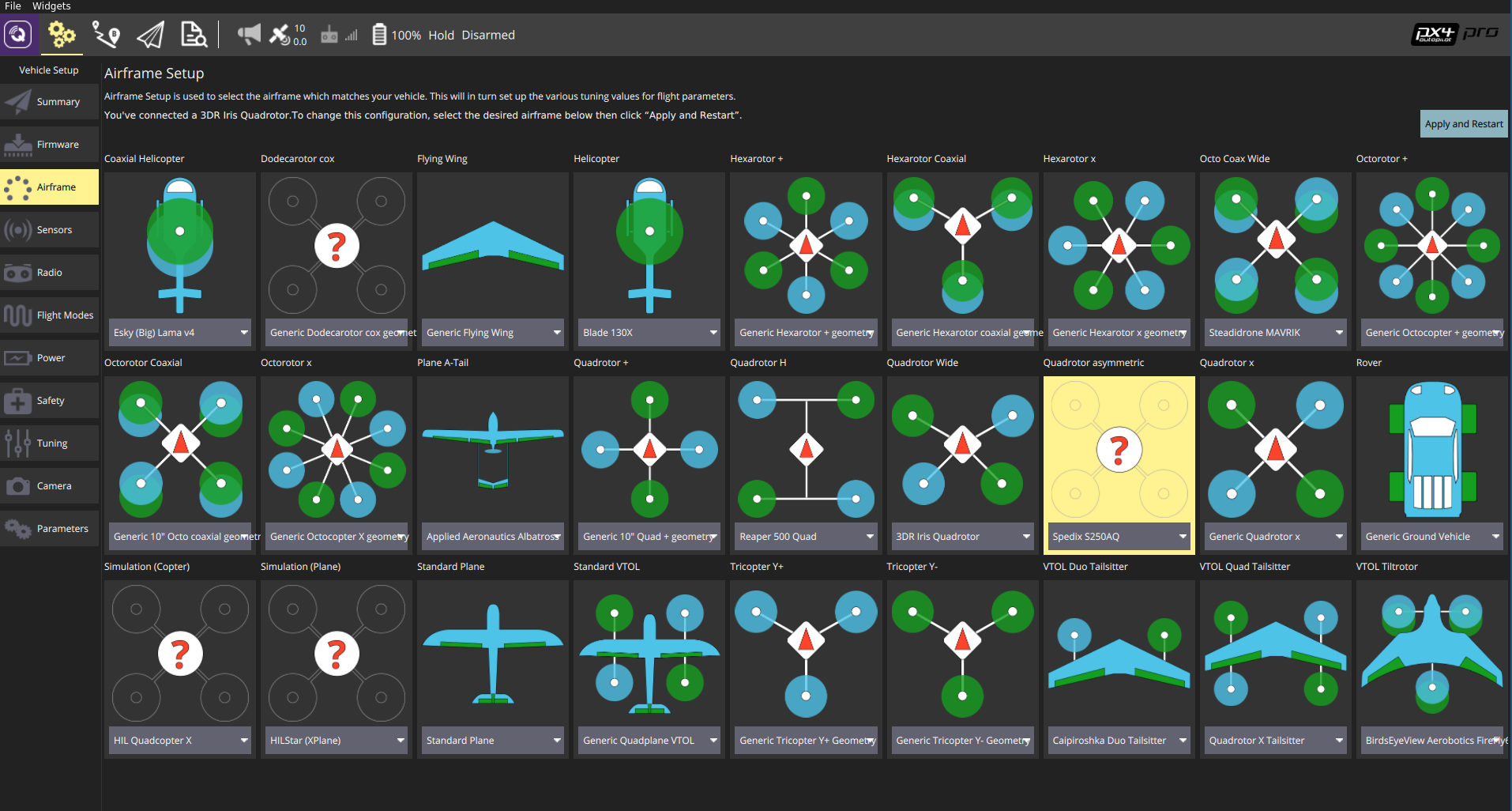
# Airframe Configuration
Select the Quadrotor asymmetric Spedix S250AQ configuration as shown below. This will not only put PX4 into quadrotor mode, but also load decent default tuning gains.