# FunCub QuadPlane (Pixhawk)
The Fun Cub QuadPlane VTOL is a standard tailplane aircraft (the Multiplex FunCub) that has been retrofitted with a QuadCopter system.
Key information:
- Frame: Multiplex FunCub
- Flight controller: Pixhawk

Unmodified, the Fun Cub is a relatively affordable plane and relatively easy to fly. After the conversion the plane is significantly heavier and less aerodynamic. It still flies quite well but needs around 75% throttle in forward flight.
# Bill of Materials
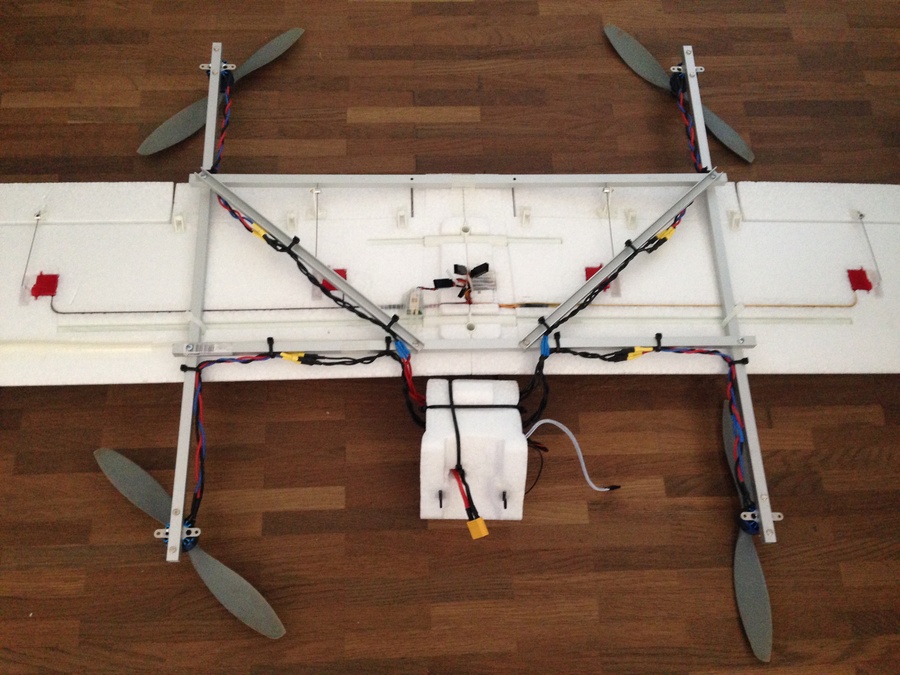
The actual plane looks roughly like as shown in the image above (other similar models will work just fine - this is a Multiplex Fun Cub). The minimal equipment required is:
- Multiplex FunCub (or similar)
- Pixhawk or compatible
- 数字空速传感器
- 900 kV motors (e.g. Iris propulsion set - motors and ESC)
- 10" props for quad motors (10x45 or 10x47)
- 10" prop for fixed-wing motor (10×7)
- GPS module
- 4S battery
- Aluminum frame for mounting the quad motors (10x10mm square tube, 1mm wall thickness)
- TOW is ~2.3kg with a 4200mAh 4S battery
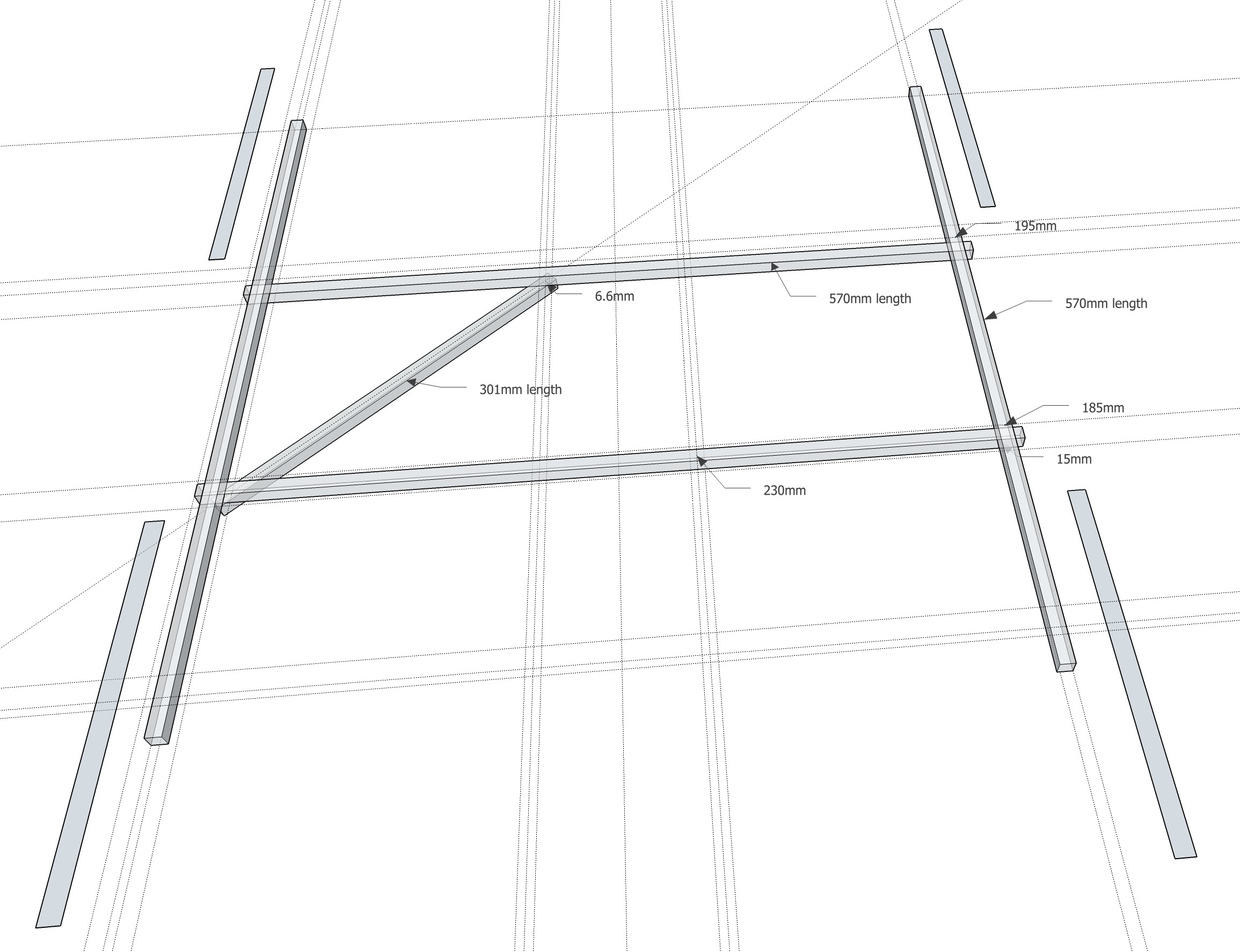
# Structure
The structure is made out of aluminum booms as shown below.
# 布线
The outputs of Pixhawk should be wired like this (orientation as seen like "sitting in the plane").
提示
The servo direction can be reversed using the PWM_MAIN_REVn parameters in the PWM_OUTPUT group of QGroundControl (cogwheel tab, last item in the left menu).
| Port | 接口定义 |
|---|---|
| MAIN 1 | Front right motor (CCW) |
| MAIN 2 | Back left motor (CCW) |
| MAIN 3 | Front left motor (CW) |
| MAIN 4 | Back right motor (CW) |
| AUX 1 | Left aileron TODO |
| AUX 2 | Right aileron |
| AUX 3 | Elevator |
| AUX 4 | Rudder |
| AUX 5 | 油门 |
For further instructions on wiring and configurations please see: Standard VTOL Wiring and Configuration.
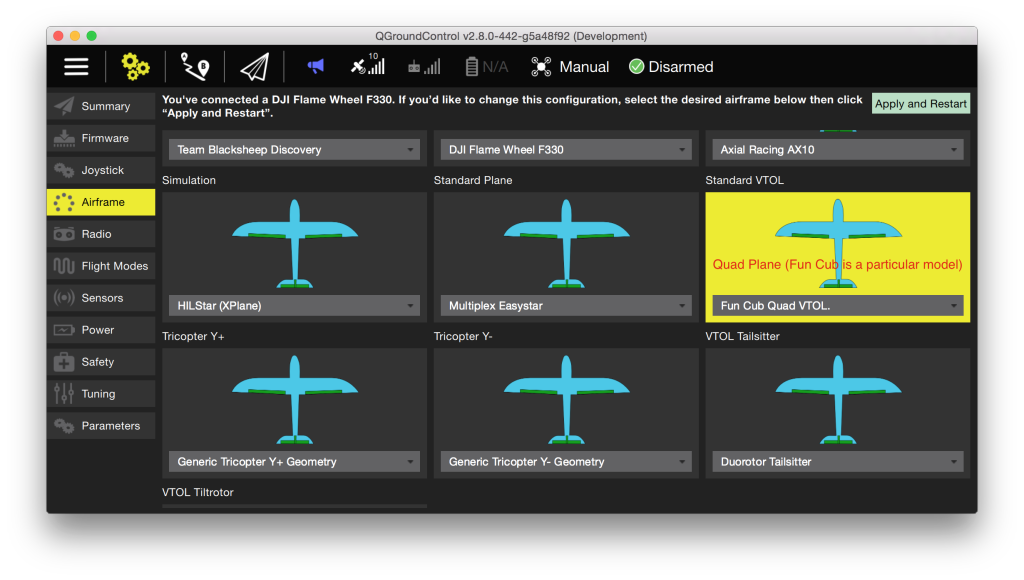
# Airframe Configuration
Configure the frame as shown in QGroundControl below (do not forget to click Apply and Restart in the top).
# 视频
# 技术支持
If you have any questions regarding your VTOL conversion or configuration please visit https://discuss.px4.io/c/px4/vtol (opens new window).