# 传感器
基于 PX4 的系统使用传感器来确定飞行器状态(自稳和启用自主控制所需)。 飞行器状态包括:位置/高度,航向,速度,空速,方向(姿态),不同方向的旋转速率,电池电量等。
系统 最低要求 陀螺仪,加速度计,磁力计(罗盘)和气压计。 需要 GPS 或其他定位系统来启用所有自动模式和一些辅助模式。 固定翼和 VTOL 飞行器还应包括空速传感器(特别推荐)。
最小的传感器组合集成在 Pixhawk 系列 飞控上(并且也能存在其他飞控平台上)。 附加/外部传感器可以连接到控制器。
下面我们介绍一些传感器。 最后有链接到关于 传感器接线 的信息。
# GPS&罗盘
PX4 支持许多全球导航卫星系统(GNSS)接收器和罗盘(磁力计)。 它还支持 实时动态(RTK)GPS接收器 ,它将 GPS 系统扩展到厘米级精度。
注解
Pixhawk 系列 飞控包括 内置 罗盘。 这对于大型飞行器(例如 VTOL ) 可能 是有用的,其中可以通过远离电源线安装Pixhawk 来减少电磁干扰。 在小型飞行器上,几乎总是需要外置罗盘。
我们建议使用安装在尽可能远离 电机/电调 电源线的外部“组合” 罗盘 / GPS 模块 - 通常在支座或机翼(固定翼)上。
常见的 GPS/罗盘硬件选项列于:GPS/罗盘。

# 空速计
对于固定翼和 VTOL 机架,强烈建议 使用空速传感器。
它们非常重要,因为自驾仪没有其他方法来检测失速。 对于固定翼飞行来说,保证升力的是空速而不是地速。
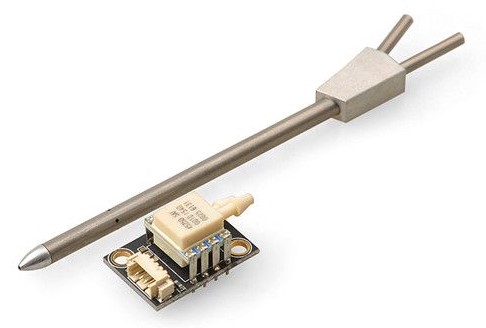
有关更多信息和推荐的硬件,请参阅:空速传感器。
# 转速计
对于旋翼,转速计 (转速计传感器 (opens new window)) 是强烈推荐的, 因为它们可以让自动驾驶仪检测失速或另一个转子故障 (对于旋翼飞行器来说,是叶片的旋转保证了升力,而不是空速或地面速度)。

有关更多信息和推荐的硬件,请参阅:转速计传感器。
# 距离传感器
距离传感器用于精准着陆,避障和地形跟随。
PX4 支持许多实惠的距离传感器,使用不同的技术,并支持不同的范围和功能。 有关更多信息,请参阅:距离传感器。

# 光流
光流 传感器使用下视相机和向下的距离传感器进行速度估计。 PX4 将光流传感器输出与来自其他定位源(例如 GPS)的信息融合,以提供更准确的位置锁定。 该传感器可以用于没有 GPS 信号的室内。
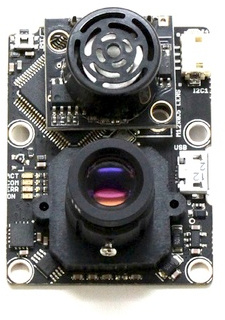
一些选项包括:
# 传感器接线
传感器接线信息通常在飞控和传感器本身的制造商文档中提供。
另外,请参阅: